[6호]2010 캠스톤 디자인 공모전 – 소형 인공위성(CANSAT) 개발
 2010 디바이스마트
2010 디바이스마트
캡스톤 디자인 공모전 입선작
소형 인공위성(CANSAT) 개발
팀명 : Dreamers
참가자 : 한국항공대학교 항공우주 및 기계공학부
[이원규, 최미미, 이찬형, 안도현, 장병규]
DREAMERS 팀 구성 및 소개
 |
 |
 |
| 성명 | 이원규 | 최미미 | 이찬형 | 안도현 | 장병규 |
| 담당분야 | SYSTEM (팀장, GPS) |
PAYLOAD (카메라,온도센서) |
CS(통신), EPS(전력) |
OBC (마이크로콘트롤러) |
SMS (외형설계 및 하드웨어) |
현재 한국 항공대학교 항공우주 및 기계공학부에 재학 중인 4학년 학생들로 구성된 팀이며, 평소에 마이크로 컨트롤러를 이용한 로봇제작에 관심이 많은 이들로 구성되었다.
현재 학교 연구 과제에서도, 같은 팀으로 활동하고 있으며, 디바이스마트 캡스톤 공모전에 제출한 작품「고도 500m에서 무선 통신이 가능한 소형 인공위성(CANSAT)」개발과 유사한 로켓에 탑재하여, 대기 정보를 얻을 수 있는 소형 인공위성(캔셋)을 제작 중에 있다.
캔셋(CANSAT)의 정의
음료 캔 사이즈와 무게(400g이하)를 가진 소형 인공위성이다. 학생들의 인공위성에 대한 전반적인 이해 증진에 목적이 있으며, 이에 매년 국제적인 경진대회가 열리기도 한다 (www.cansatcompetition.com/Main.html). 이런 캔셋으로 이번에 우리가 개발한 모델은 KUMSAT-1A이다.
임무목적 및 시나리오
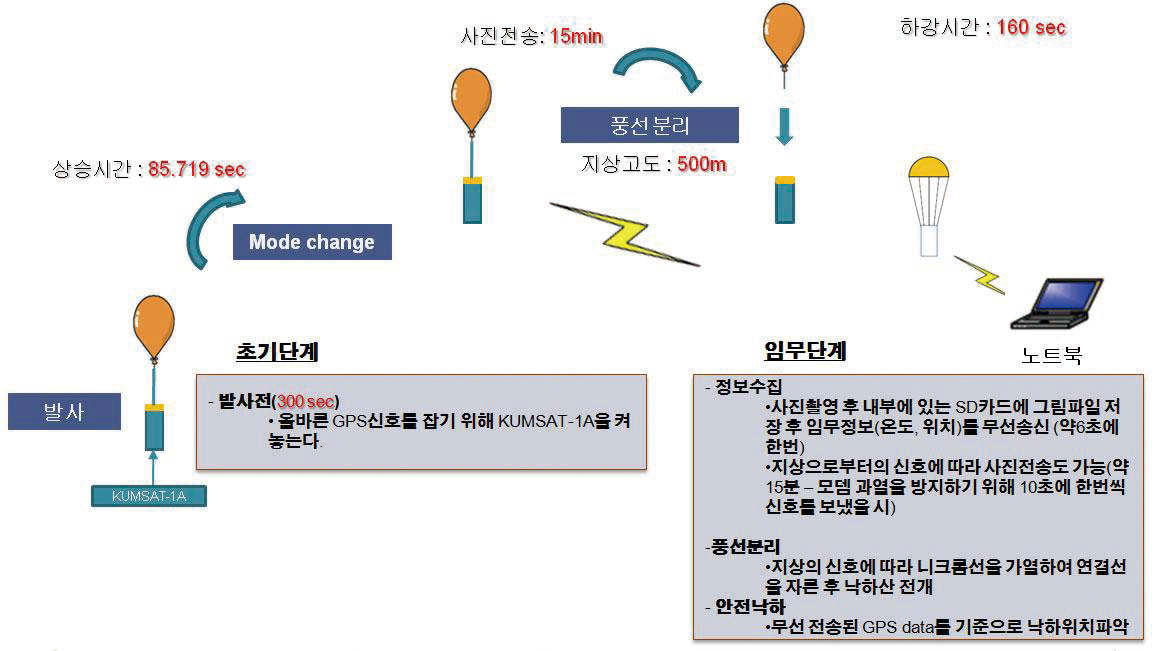
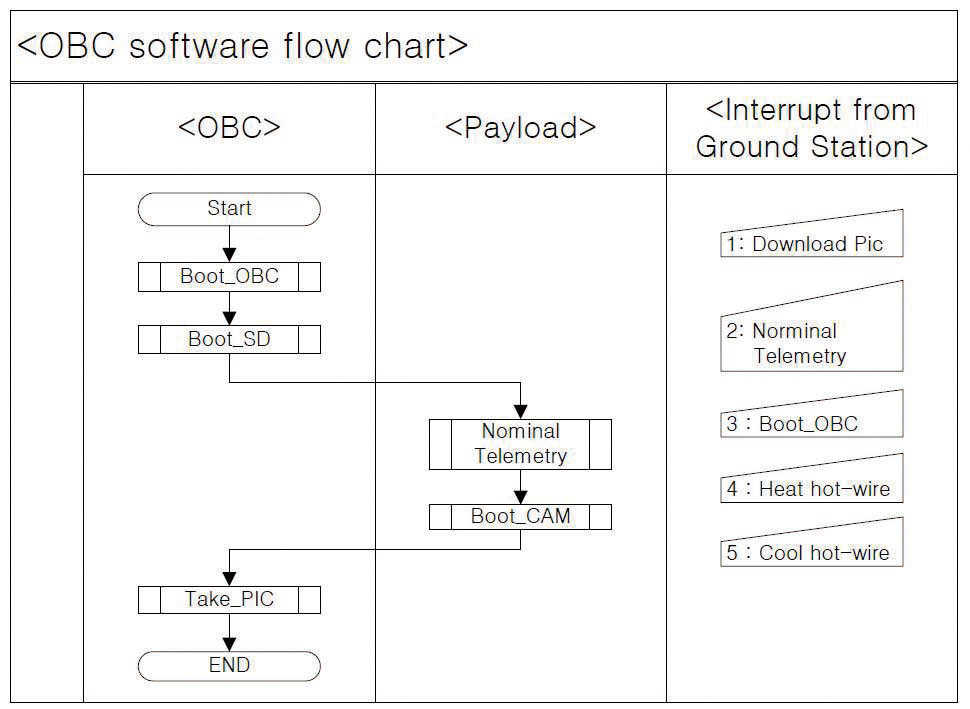
그림1 KUMSAT-1A의 임무 흐름도
KUMSAT-1A는 그림1에서 보듯이 기상 측정용 헬륨 풍선을 이용하여 고도 500m에서 사진 촬영과 온도 측정, 위치정보의 송신 등의 임무를 수행한다.
주어진 임무는 크게 2단계로, ‘초기단계’와 ‘임무단계’로 나뉘어져 운용된다. 우선 전원을 켜면 초기단계가 시작되는데, 이 상태로 GPS 신호를 안정적으로 받을 때까지 대기한다. GPS 신호가 안정적으로 수신되는 것을 확인한 후(약 5분소요)에, 임무단계로 돌입하며 기상 관측용 풍선과 연결 된 상태로 고도 500m까지 상승한다. 목표 고도 500m(또는 1km도 가능)에 이르러 지상국은 KUMSAT-1A로부터 무선으로 사진을 전송 받는다.
지상국에서는 무선으로 사진을 전송받기 위해서 KUMSAT-1A에 Command를 전송하게 된다. 무선으로 사진을 전송 받는데 소요되는 시간은 약 15분 정도이다. 무선 사진 전송이 완료된 후 지상국에서 보내는 Command에 의해, WCD(Wire Cutting Device)의 니크롬선이 가열되어, 기상풍선과 연결되어있는 선을 끊고, KUMSAT-1A는 풍선으로부터 분리된다. 분리 이후 낙하산을 전개하여 낙하하며, 매 6초마다 촬영한 이미지 데이터를 메모리카드에 저장하고, 동시에 낙하하면서 측정한 대기온도와 위치정보를 지상국에 전송한다. 마지막으로 지상국에서 수신된 위치정보(경도·위도)를 토대로 지상국 소프트웨어를 이용하여 KUMSAT-1A의 위치를 파악하여 회수한다.
KUMSAT-1A의 시스템은 실제 인공위성과 같이 크게 탑재체와 버스(Bus)시스템으로 나눌 수 있으며, 버스시스템은 다시 기계 및 구조계(Structure Mechanical Subsystem, SMS), 탑재컴퓨터(On Board Computer, OBC), 전력계(Electrical Power Subsystem, EPS) 및 통신계(Communication Subsystem, CS)의 네 개의 서브시스템으로 구성된다.
기계 및 구조계 (SMS)
기계 및 구조계는 전체 시스템의 제한된 질량 요구조건 내에서 탑재체와 탑재컴퓨터, 통신계, 전력계의 각 부품이 구조적으로 간섭과 배선을 고려하여 개발하였다.
KUMSAT-1A의 질량배분은 표1과 같다.
| Subsystem | 부품명 | 무게(g) |
| 탑재체 | Camera | 10 |
| GPS | 10 | |
| Thermometer | 5 | |
| 기계 및 구조계 | Main structure | 130 |
| Wire Cutting Device | 5 | |
| 탑재 컴퓨터 | Main board | 40 |
| SD Memory & Memory socket | 10 | |
| 전력계 | Battery | 80 |
| EPS board | 50 | |
| 통신계 | RF modem | 40 |
| Antenna | 30 | |
| TOTAL | KUMSAT | 410 |
| 표1 질량배분 | ||
KUMSAT-1A 구조체의 재료는 Aluminum-7075를 사용하였으며, Aluminum-7075의 물성치는 표2와 같다.
| 재료 | Aluminum-7075 |
| 극한응력 (MPa) | 570 |
| 항복응력 (MPa) | 280 |
| 절대신장율 (%) | 11 |
| 탄성계수 (GPa) | 72 |
| 표2. 재료의 물성치 | |
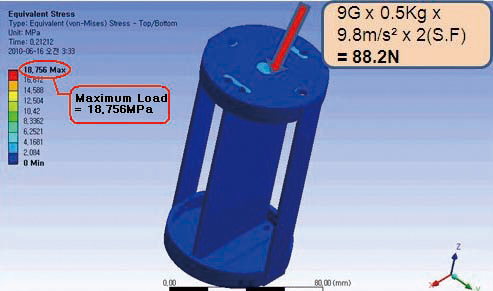
로켓이 발사되는 과정에서 KUMSAT-1A는 약 9G의 중력가속도를 받게 되고, 설계상의 안전계수 2를 적용하면 88.2N의 하중을 받게 된다. 이 경우를 고려하여 ANSYS를 이용, 응력 해석 결과는 그림2와 같다. KUMSAT-1A에 작용하는 최대 응력은 18.756MPa로 재료의 항복 응력인 280MPa에 비하여 매우 작아 하중을 충분히 견딜 수 있을 것으로 보인다.
 |
 |
 |
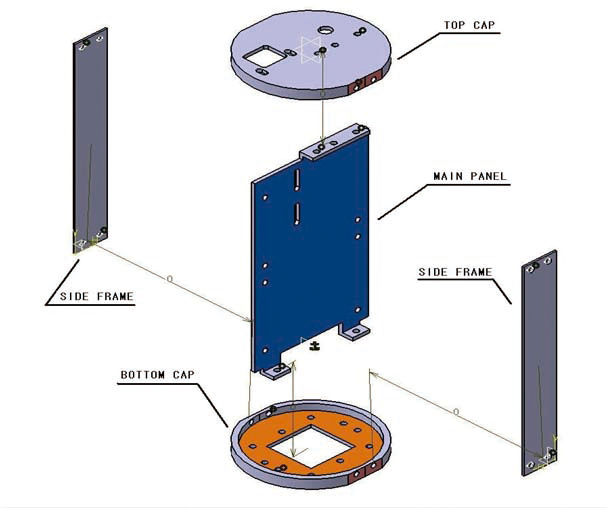
| 그림 2 | 그림 3 | 그림 4 |
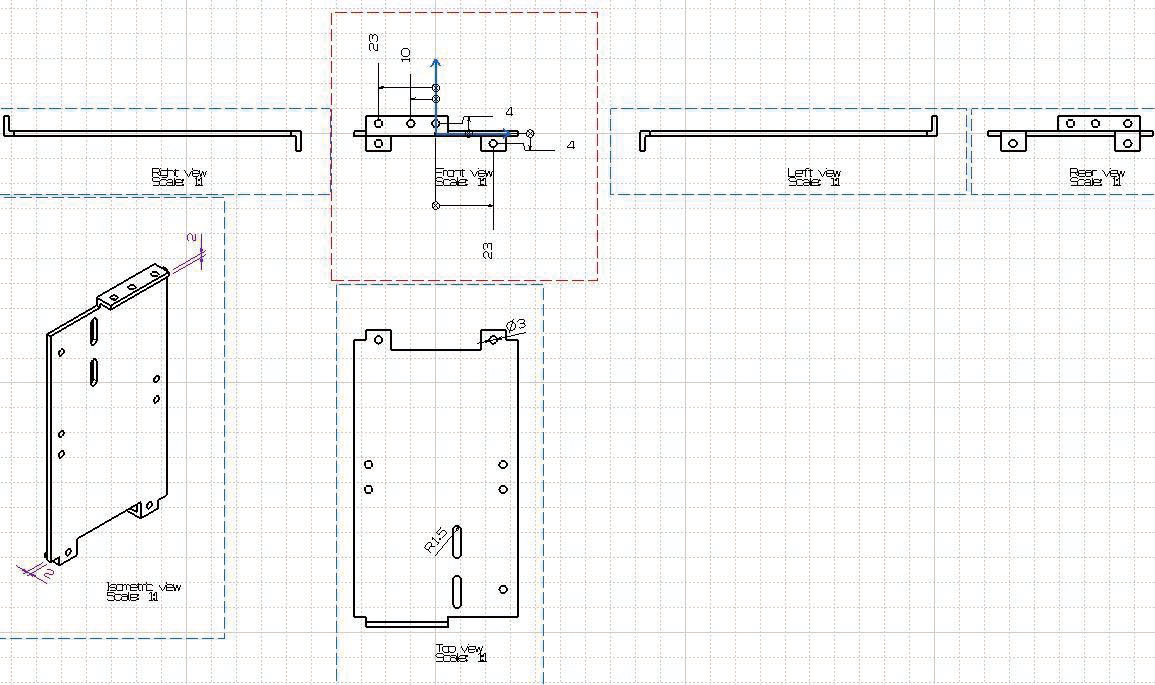
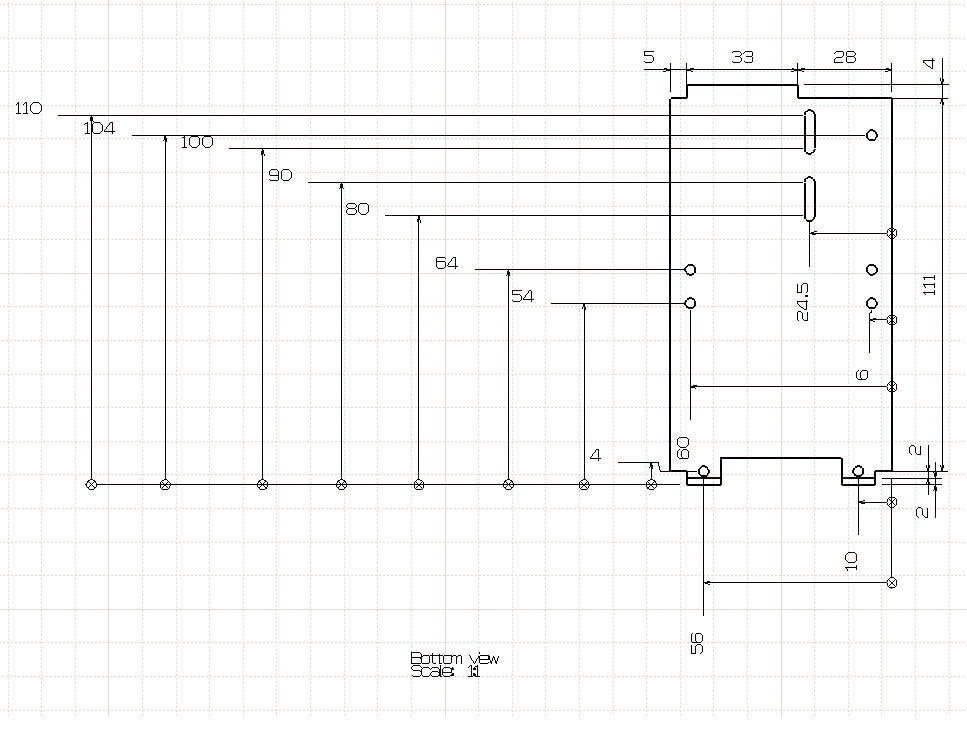
KUMSAT의 기본 골격은 그림3과 도면1~5와 같이 Main Panel, 두 개의 Side Frame 그리고 Top Cap과 Bottom Cap으로 구성되어 있다. Side Frame의 크기는 2mm×20mm×123mm이며 하중을 지탱하고, 외부에서 올 수 있는 충격 요소로부터 내부를 보호하는 역할을 한다. Main Panel은 2mm×66mm×119mm의 크기로 각 서브시스템의 부품들을 고정하고 GPS 수신기와 카메라가 위 아래 Cap에 잘 고정되도록 설계하였다. Top Cap과 Bottom Cap은 크기가 Φ66mm×10mm로 카메라와 안테나, GPS가 외부를 지향할 수 있도록 하며, 특히 Bottom Cap에는 낙하산을 연결할 수 있도록 하였다.
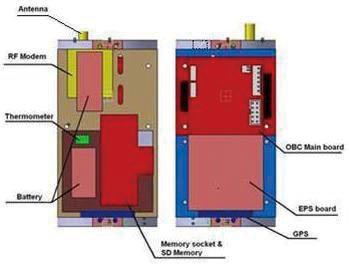
각 부품의 배치는 그림4에 나타내었다. 이것은 KUMSAT-1A의 부품 배치인데, 풍선과의 연결을 끊기 위한 Wire Cutting Device(WCD) 때문에 배터리는 두 개가 장착된다.
도면 1 ~ 5 보기

도면 1. Top Cap
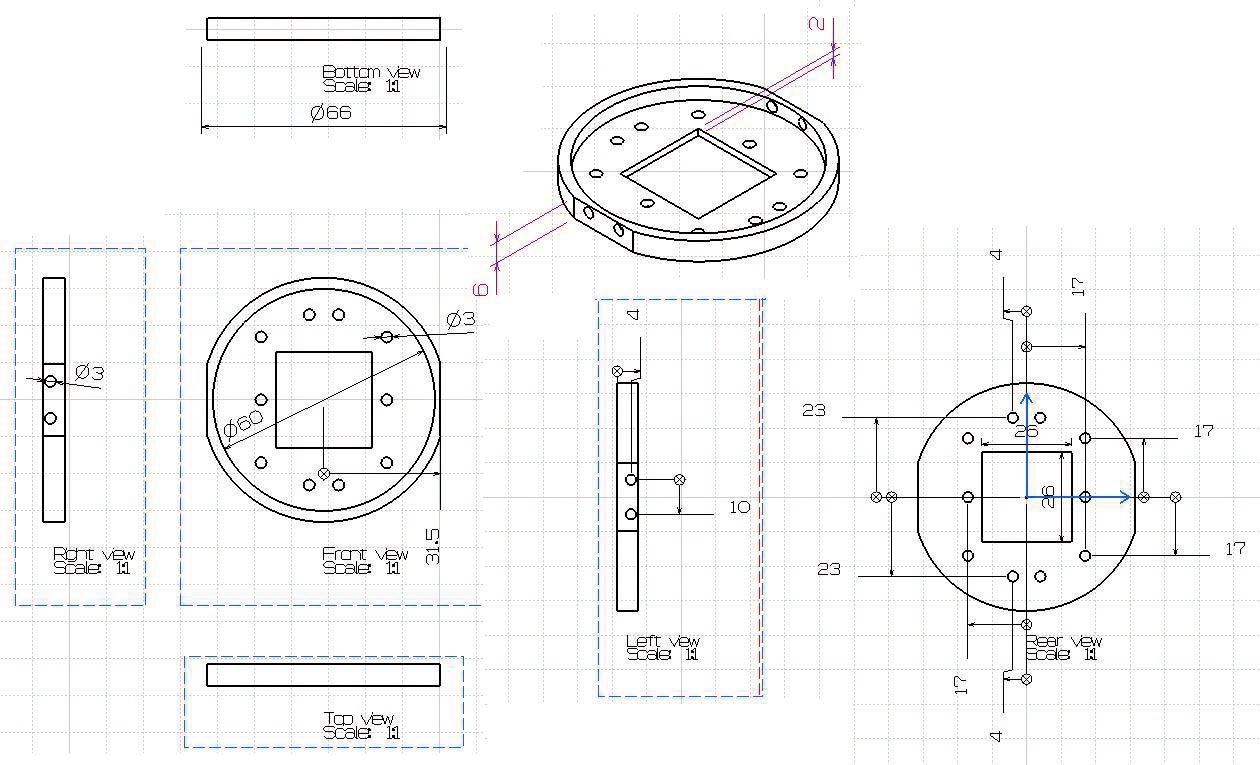
도면 2. Bottom Cap
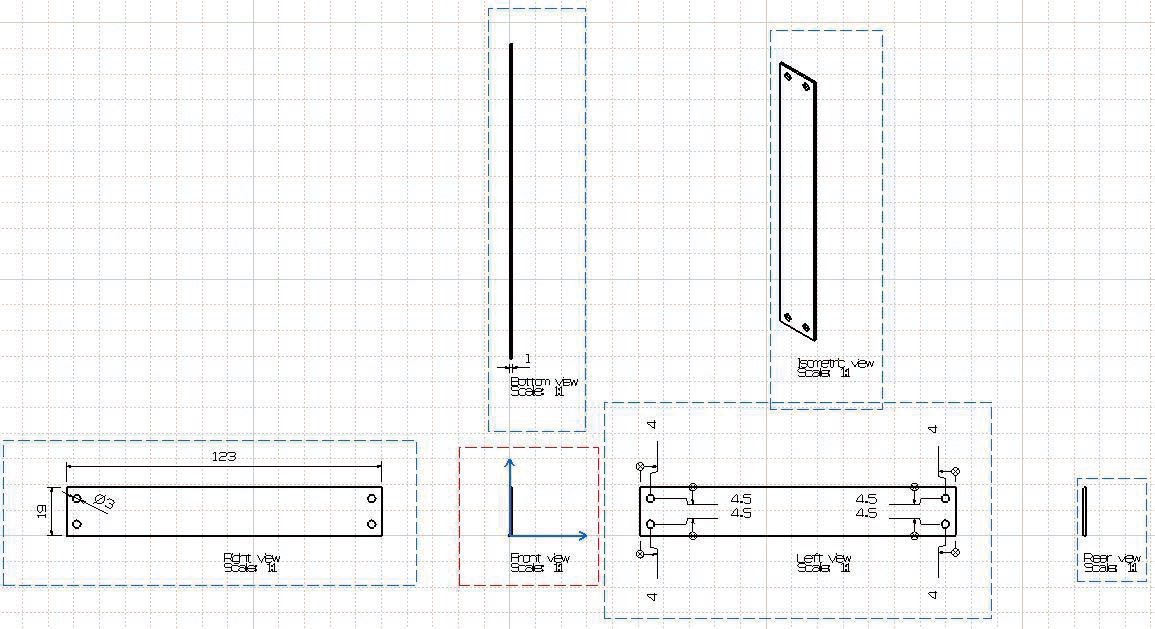
도면 3. Side Frame
도면 4. Side Frame
도면 5. Main Panel

조립을 위한 준비물은 다음과 같다. 원할 한 조립을 위해 니퍼와 롱노즈 및 칼, 육각렌치 등을 준비하였다.
 |
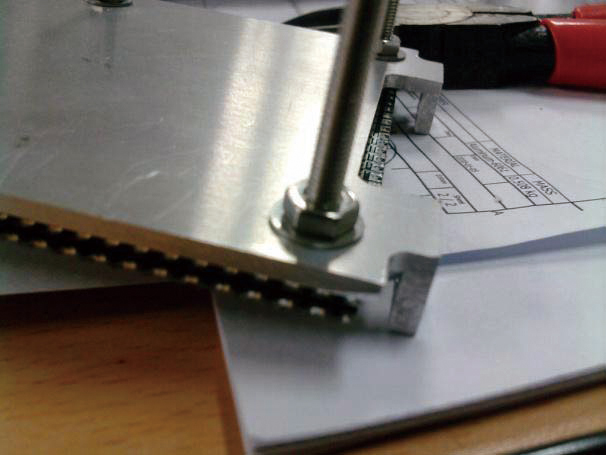 |
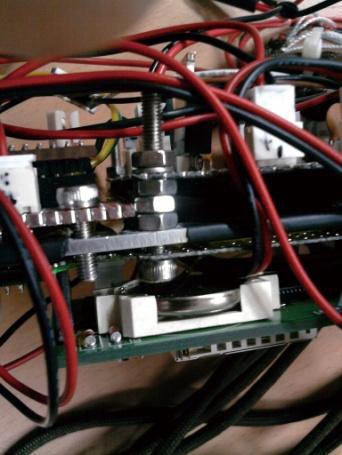
위에 사진과 같이 탑재체를 볼트와 너트로 고정하는 방식을 채택하였다.

볼트와 너트로 체결이 힘든 곳은 케이블 타이를 이용하여 체결한다.
 |
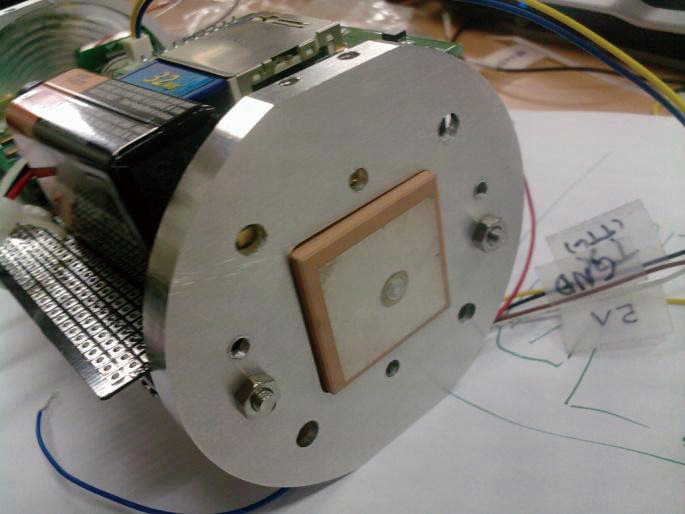 |
카메라와 안테나는 아래를 지향하게 배치하며, GPS는 하늘을 향하게 배치한다.
 |
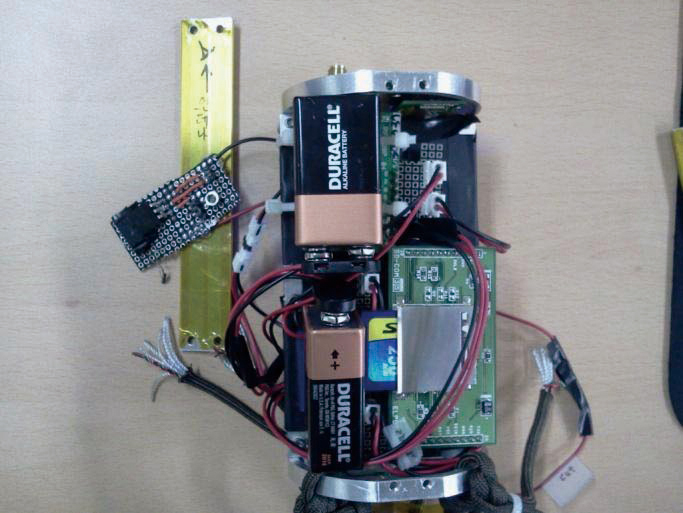 |
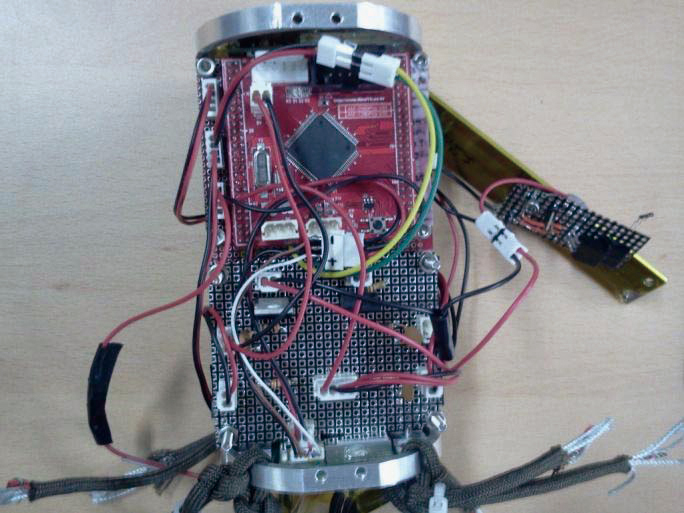
| OBC와 EPS | RF Modem, SD Memory, Batteries |
체결을 완성한 모습이다.
 |
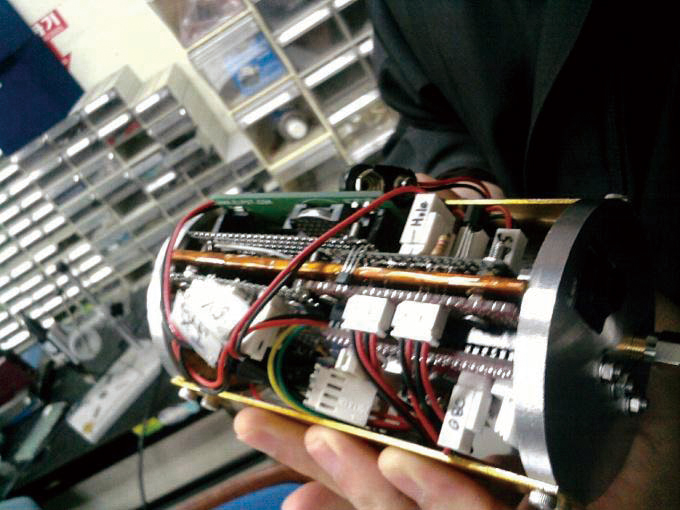 |
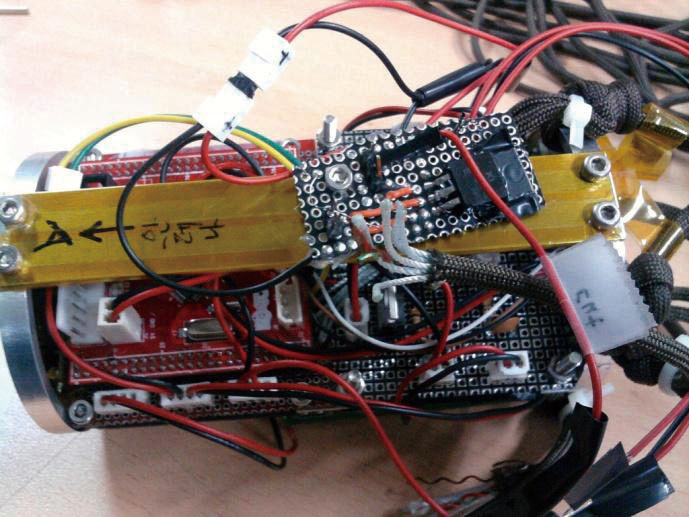
| WCD(Wire Cutting Device)가 장착된 모습 | 완성된 KUMSAT |
 |
 |
낙하산은 위에 사진과 같이 장착이 되며, 낙하 속도 3m/s로 설계하여 장착하였다.
기상 풍선은 KUMSAT-1A의 무게 및 낙하산 무게, 낚시 줄 및 기타 외부환경요인을 감안하여 2330g을 들어 올릴 수 있는 것으로 선택, 사이언티픽 세일즈에서 30$에 구매를 하였다.
 |
 |
| http://www.scientificsales.com/8237-Weather-Balloon-300-Grams-Natural-p/8237.htm | |
 |
 |
KUMSAT은 기상풍선과 낚시줄로 연결되며 낙하산 또한 낚시줄에 의해 감싸지는 형태를 가진다.
 |
 |
 |
Payload
1) 탑재체 스펙 현황
·카메라 모듈
 |
- Image sensor type : CMOS
- mage data type : JPEG
- Size : W20 x L28 x H24
- Mass : 11g
- Interface : UART
- Power consumption : 200mW
·GPS : FGPMMOPA1
 |
- High Sensitivity -165dBm
- Position Accuracy : < 3m
- Cold start under 37 seconds(typical)
- Maximum acceleration of 4G
- Power consumption : 335mW
· 온도센서 : Digital Thermometer
 |
- 3-wire interface
- 9-Bit Resolution
- Measures temperature range : -55˚C ~ +125˚C
- Converts temperature in 1s at least (max)
- DIP package
2) CMOS 카메라 모듈
KUMSAT의 주요 탑재체는 CMOS 카메라이다. 이 카메라 모듈은 탑재컴퓨터와 UART 통신이 가능하며, 파일 크기가 작은 JPEG 형식을 지원하기 때문에 빠른 데이터 통신이 가능하다. 또한 이미지 크기를 640×480, 320×240, 160×128, 80×64(pixel)의 네 가지 중 하나로 선택할 수 있는데, 640×480의 경우 파일 크기가 약 40kB 내외이며, 320×240의 경우에는 약 10kB 내외이다. 파일 크기가 10kB일 경우 메모리카드에 사진 한 장을 저장하기까지 약 6초의 시간이 걸리며, 이 시간은 파일 크기에 비례한다. 따라서 640×480 크기로 찍을 경우, 임무 시간 내에 촬영 가능한 사진 수에 큰 제약을 받으므로, 320×240의 크기로 약 20장의 사진을 촬영할 수 있도록 절충하였다.
사진 촬영 프로그램의 알고리즘은 그림5에 나타내었다. 우선 카메라와 탑재컴퓨터의 통신을 위해, 동기를 맞추는 과정이 필요하다. 카메라가 Command를 받은 것을 확인하면 카메라는 탑재컴퓨터로 ACK 신호를 보낸다. 그 이후, 이미지 타입과 해상도 등의 기본 설정을 마치고, 사진을 찍으라는 Snapshot Command를 보내고 사진을 받는다. 기본 설정은 초기에 한 번만 수행하며, 그 이후로는 Snapshot과 Get Picture만 반복 수행한다.
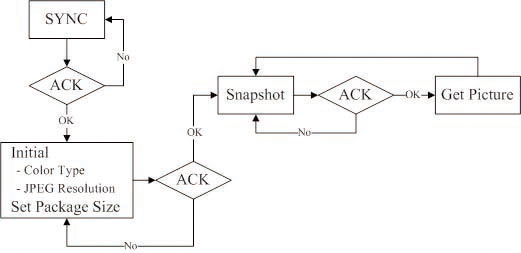
그림5
3) GPS 수신기
KUMSAT-1A은 GPS 수신기에서 전송받은 위치 정보(경도·위도·고도)를 지상국에 전송하는 임무를 수행한다. GPS 수신기는 NMEA 형식의 데이터를 UART 통신을 이용하여 KUMSAT-1A의 탑재컴퓨터에 전송한다. 이 때문에, KUMSAT-1A에 필요한 정보를 선별하는 파싱(Parsing) 프로그램이 필요하다. KUMSAT-1A에 필요한 데이터를 파싱하는 소프트웨어의 알고리즘은 그림6과 같다. 탑재된 GPS 수신기는 3m의 위치 정밀도를 가지고 있으며, 정밀한 좌표 정보를 수신하기까지는 약 5분정도의 시간이 소요 된다.

그림 6
4) 온도센서
KUMSAT-1A는 대기온도를 측정하는 임무 또한 수행한다. 온도센서는 회로 구성이 간단한 1-wire 통신을 사용하고, 최소한 매 초마다 온도 변환을 할 수 있으며, 데이터를 디지털 값으로 받아들여 별도의 값 변환을 하지 않아도 되는, 디지털 온도센서를 사용하였다. 이 센서를 탑재한 KUMSAT-1A는 -55˚C 에서 125˚C 까지 온도측정이 가능하며 -10˚C 에서 85˚C 사이에서는 ±0.5˚C 의 정확도를 갖는다.
OBC
KUMSAT-1A에는 하나의 마이크로컨트롤러와 외부메모리(SD카드)로 구성된다. 마이크로컨트롤러는 AVR계열의 ATmega2560을 사용하였다. ATmega2560은 다른 마이크로컨트롤러와 달리 UART Port가 4개까지 지원이 되기 때문에, 이 시스템에 적합하다. 외부메모리는 지상국으로 보내기 위한 카메라의 이미지데이터를 저장하기 위해 장착하였다. 이것 역시 마이크로컨트롤러의 기능을 사용할 수 있으나, 내장된 메모리가 작기 때문에 더 큰 용량의 외부메모리를 사용하였다.
 |
 |
 |
1) 회로도

2) 인터페이스
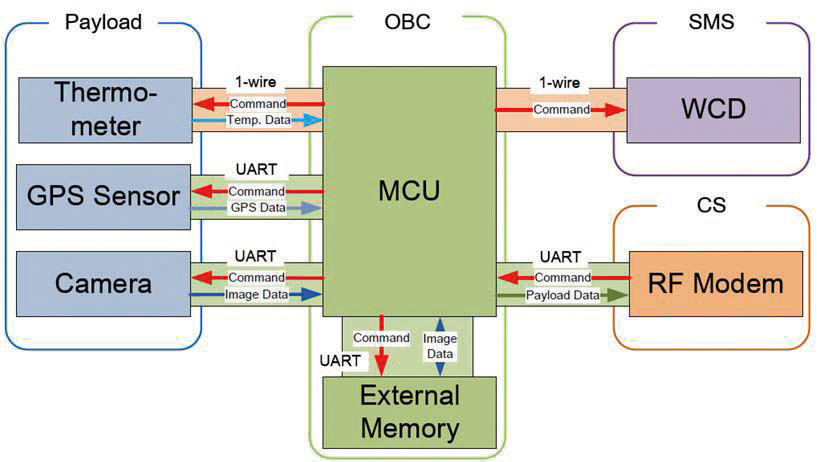
그림 8. 인터페이스 다이어그램
KUMSAT-1A는 2가지의 내부인터페이스를 사용하게 되는데, UART, 1-Wire를 사용하게 된다. 탑재컴퓨터의 마이크로컨트롤러와 각 서브의 마이크로컨트롤러는 UART를 통해 연결된다. 그리고 온도를 측정하는 센서와 절단을 위한 WCD는 1-Wire를 통해 연결된다.
3) 프로그램
codevisionAVR 2.03.4 를 사용하였으며, 대체적인 흐름은 다음과 같다.
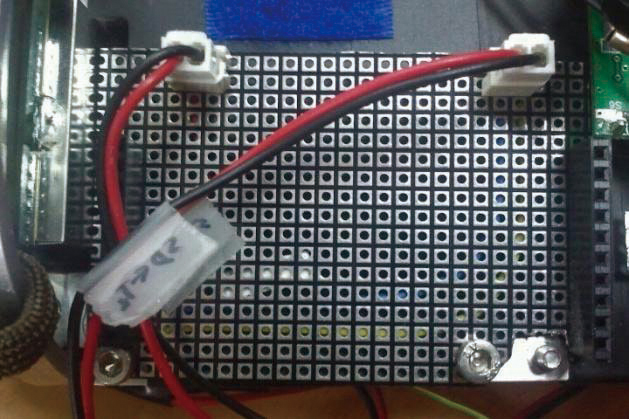
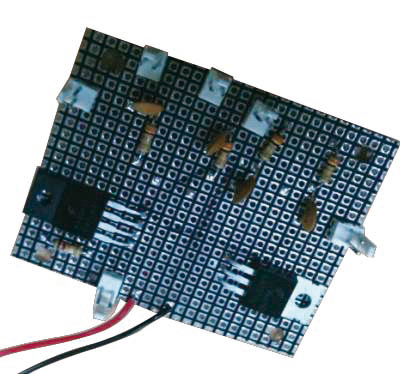
4) OBC Board
KUMSAT-1A내에 효과적인 조립과, 다른 Sub System들과의 적절한 인터페이스 연결을 위해서 OBC Board를 구성하였다. ATMega2560 Module보호를 위해 Board 납땜을 직접적인 연결보다는, 핀헤더소켓 Dual 2×40 Straight(2.0mm)를 이용하여 ATMega2560과 Board를 연결해 주었다.
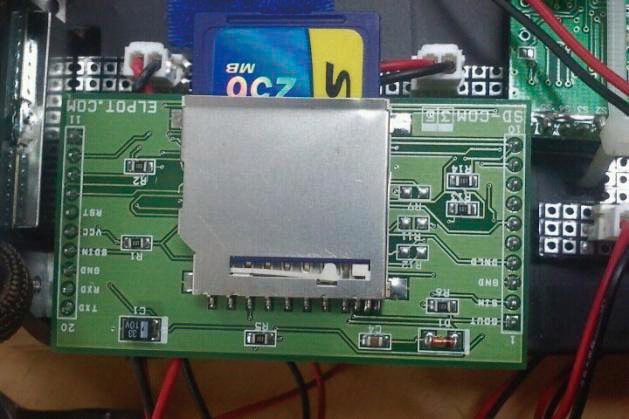
5) SD Board
SD Module보호를 위해, Board와 직접적인 납땜보다는 핀헤더소켓 Single 1×40 Rightangle(2.54mm)을 납땜을 통해 연결하였고, 전원 및 ATMega2560과의 연결을 위해 몰렉스(male 2핀, 2.54mm피치타입, 스트레이트)를 납땜을 이용해 연결해주었다.
 |
 |
전력계
EPS 전력계는 각 서브 시스템에서 요구하는 전력을 안정적으로 공급하는데 목적이 있다. 각 서브시스템에서 요구하는 전력량은 표-3와 같다.
| Sub | Model | V | mA |
| OBC | SD Memory | 5 | 60 |
| MCU | 5 | 14 | |
| CS | RF Modem | 5 | 60 |
| Pay load | Thermometer | 5 | 1.5 |
| Camera Module | 3.3 | 60 | |
| GPS Receiver | 5 | 67 | |
| SMS | WCD | 5 | 300 |
| 표3 재료의 물성치 | |||
풍선에 매달아 띄우고 하강시키는데까지 요구되는 미션 타임을 25분 정도로 예상하였고, WCD는 약 10초간 작동 할 것을 감안하였을 때 요구되는 전력량은 약 500mWh이다. 그리하여 시중에서 쉽게 구할 수 있는 9V, 550mAh 용량의 알카라인 배터리 2개를 병렬로 연결하였다.(요구하는 미션 타임에 변동에 따라 배터리수 를 늘리는 것이 가능 하리라 생각된다.) 각 서브시스템에서 요구하는 입력 전압을 공급하기 위하여 두 종류의 Linear type regulator(78T05, 78R33)를 사용하였다.
 |
 |
통신
CS(통신계, Communication System)는 탑재컴퓨터(OBC)의 마이크로 컨트롤러(MCU)가 온도센서, GPS, 카메라로부터 수집한 데이터들을 지상국으로 보내기 위한 수단으로써, RF모뎀과 안테나로 구성되어지며 최대 500m거리에서의 안정적인 데이터 전송을 목적으로 한다. CS의 전체적인 Diagram은 그림9와 같다.
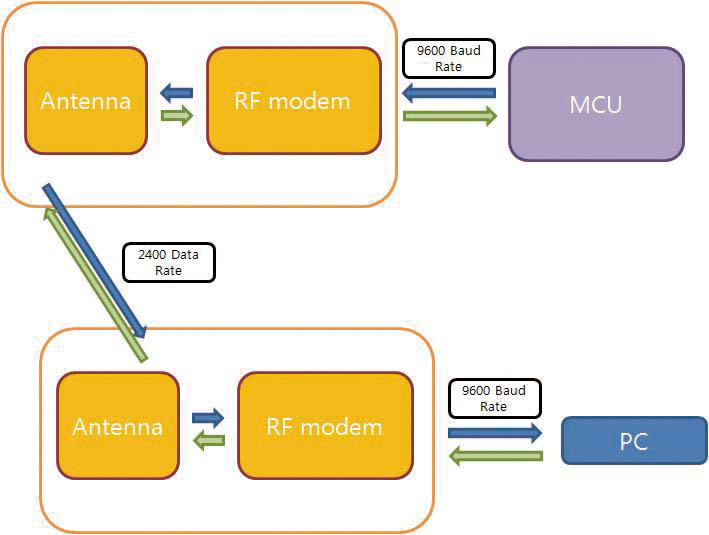
그림 9. CS Diagram
500m이상의 거리에서의 안정적인 통신을 위해 424MHz의 장거리 통신 모뎀을 선택하였으며, 사진전송 시 BER(Bit Error Rate)의 최소화를 위하여 2400bps의 Data Rate을 선택하였고, Link Budget은 다음과 같다.
| Item | KUMSAT-1A |
| Transmitter Power Output (dBm) | 10 |
| Transmitter Cable Attenuation (dB) | 0 |
| Transmitter Antenna Gain (dBi) | 2 |
| Free Space Loss (dB) | 84.97 |
| Reciever Antenna Gain (dBi) | 2 |
| Reciever Cable Attenuation (dB) | 0 |
| Reciever Sensitivity (dBm) | -122 |
| Link Margin (dBm) | 51 |
| 표4. Link Budget | |
① 제품선정
보통의 경우 Link Margin이 3dBm이면 통신이 가능하다고 판단하는데, 위의 경우 51dBm이므로 통신에는 아무런 문제가 없다고 할 수 있다. 다만 사진 데이터의 전송 시 BER(Bit Error Rate)로 인하여 온전한 상태의 사진을 전송받지 못할 수도 있다. 따라서 이에 대비하여 KUMSAT내부에 메모리카드를 장착하여 추후 수거가 가능하도록 하였다.
지상에서부터 풍선을 이용하여 상공 500m까지 상승한 뒤 지상에 떨어질 때까지 KUMSAT이 전송하는 각종 데이터들의 프로토콜은 아래와 같다.
| GPS Time | 고 도 | 위 도 | 경 도 | 온 도 |
또한 위의 Protocol을 1회 전송했다는 것은, 한 장의 사진을 찍었다는 것을 의미하기도 한다. 그리고 RF모뎀의 기능적 특성에 의해서 각 프로토콜 간에는 10초의 지연을 주도록 한다.
풍선으로 KUMSAT-1A를 상승시키기 때문에, 지형적 풍속이나 풍향 온도 등 대기상태를 예상할 수 없기 때문에, 오로지 지상국에서 받는 데이터에 의존해서 상황에 따라 Command를 전송하여 KUMSAT을 제어해야한다. 예를 들어 500m 고도에서 원하는 한 장의 사진을 지상국으로 전송하기 위해서는 “1”라는 Command를 그리고 풍선과 KUMSAT을 분리시키기 위해서는 “4”라는 Cut Command를 지상국으로부터 KUMSAT에 전송하여야 한다.
지상국은 KUMSAT-1A의 CS와 마찬가지로 안테나와 RF모뎀, 그리고 PC로 구성된다. 이 때 사용되는 RF모뎀은 KUMSAT의 RF모뎀과 주파수 및 Data Rate이 같은 것을 사용하도록 한다. 또한 지상국은 위의 구성요소 외에, 실시간으로 송수신 Data의 저장 및 확인이 가능하고 제어가 가능한 소프트웨어를 사용한다.
위와 같이 전체적인 개념을 잡고 실제 KUMSAT-1A에의 장착을 위한 제품 선정 및 Board를 세팅하면 아래와 같다.
① 제품선정
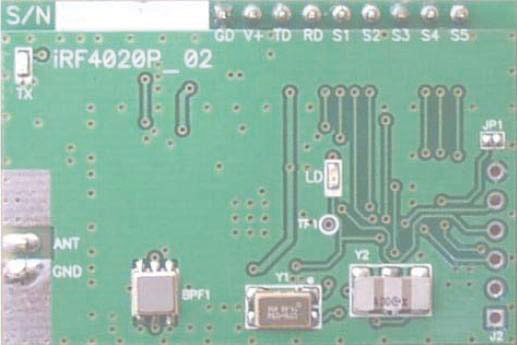 |
|
|
② Board 추가
KUMSAT내에 효과적인 조립과 다른 Sub System들과의 적절한 interface연결을 위해서, 인두기를 이용하여 추가적인 Board를 납땜한다.
 |
 |
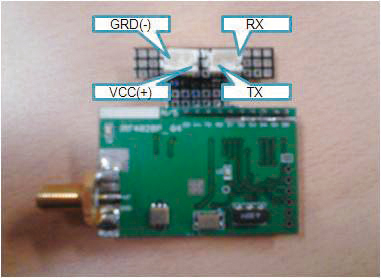
③ 조립
실제 KUMSAT에 RF모뎀이 장착된 모습으로 RF모뎀 상단에 공간의 효율적 사용을 위해서 배터리 1개가 위치한다.

④ KUMSAT상승 후 Data 전송 (지상국)
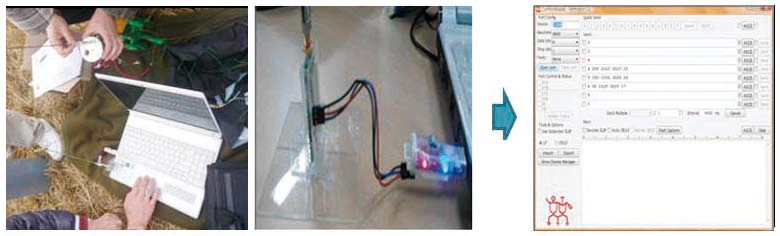
지상국은 앞장에서 말한 것처럼 KUMSAT-1A와 같은 사양의 안테나와 RF모뎀을 사용하며, ISP를 이용하여 PC에 연결한다. 이때, 지상국에서 안테나 Gain이 더 높은 지향성의(예, Yagi Antenna)안테나를 사용하면 더 높고, 먼 거리에서도 안정적으로 Data를 받을 수 있다. 다만 대상 물체를 비교적 정확하게(일정 각 범위내로) 조준하여야 한다는 제한조건이 붙는다. 지상국에서는 With Robot의 Comport Master라는 소프트웨어를 사용하였는데, 이는 With Robot(www.withrobot.com/118)에서 쉽게 다운받을 수 있으며, 이 프로그램을 통해서 KUMSAT과의 양방향통신 및 수신 데이터의 확인 및 저장이 가능하다.
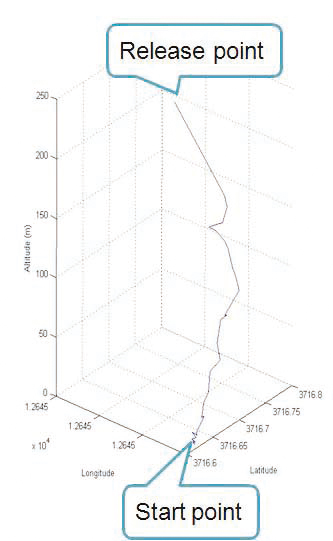
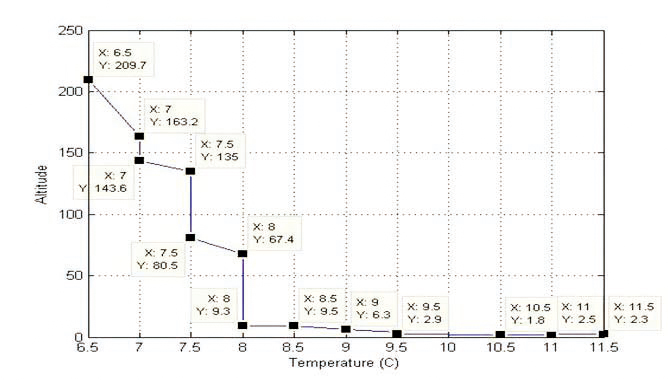
⑤ 실제 수신 받은 Data
 |
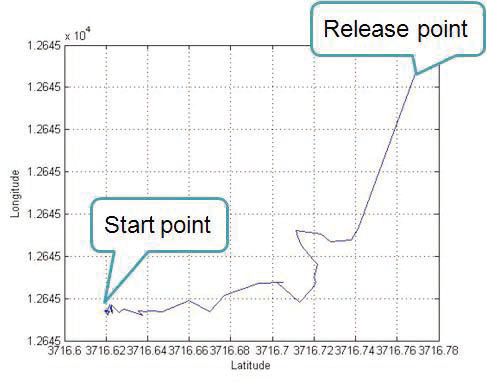 |
| 3D Route(위도, 경도, 고도) | 2D Route(위도, 경도) |
 |
 |
| Altitude-Temperature Data | Image Data |
 |
 |
 |
 |
| SD 메모리카드에 저장된 Image Data | |||


