[55호]MAGS

2019 ICT 융합 프로젝트 공모전 우수상
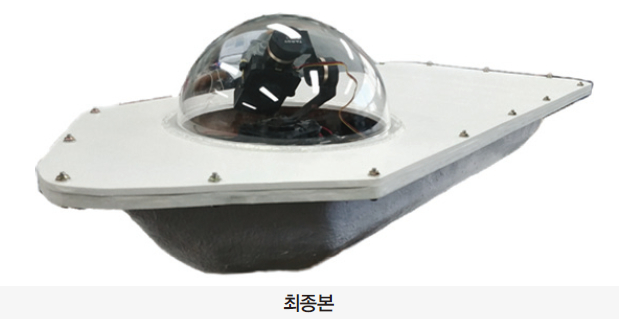
MAGS
글 | 경북대학교 황선종, 박재현, 최주영, 이준영, 김창현
1. 심사평
칩센 구현된 결과물과, 진행 개요를 살펴 보자면 실질적으로 기존 드론과의 비교에는 용도와 목적이 다른 방향으로 보여 작품 개발의 전제가 약간 아쉽습니다. 또한 작품의 개발 배경과 목표는 현재와 같은 사람이 직접 움직이거나, 화석 연료 사용을 하는 기존 선박의 제약점을 극복하겠다고 하였으나, 현재 구현된 작품을 보자면 실질적인 구조활동 내지 모니터링시에 발생할 문제점이나, 적용된 Li-Polymer 배터리 적용 시 보여질 단점에 대해서는 많은 고민이 되지 않은것으로 보입니다. 실용성을 높이기 위하여 오히려 기존의 연료를 이용한 구동 시스템을 장착하여 무인선체의 사이즈와 출력을 높여 효용성이 높은 시스템을 무인/최적화 하게 될 경우 실용성 부분에서 더 많은 이득이 있을 것으로 보입니다.
뉴티씨 매우 잘된 작품으로 평가됩니다. 아이디어도 좋고, 이를 실제로 구현한 방법 등이 매우 신선합니다. 직접 회로뿐만이 아니라, 소스와 기구까지도 제작한 방법도 매우 좋게 생각됩니다. 학생으로서 이정도 수준까지 만들어낼 수 있다는 점에서 향후 매우 뛰어난 엔지니어로 성장할 것이라고 생각합니다.
위드로봇 하드웨어의 완성도에 비해 소프트웨어의 완성도가 아쉽습니다. 잘 작성된 보고서가 인상적인 작품이었습니다.
펌테크 기존 드론의 장단점을 학생의 눈으로 잘 관찰해서 보완점을 고심하고 구성한 작품이라고 생각합니다. 단, 작품 구상에 관련된 아이디어는 우수하나 제출된 문서 내용을 종합적으로 판단해 보았을때 목표로 했던 핵심 기능인 GPS 및 네이버 연동 기능 구현은 완성되지 않은 것으로 판단됩니다.
2. 작품 소개
기존 드론의 체공시간 및 탑재 중량 부족, 불안정한 영상 취득 등의 문제와 기상상황에 따른 운용 제한과 내연기관의 환경오염 문제를 해결하기 위해 제작되었다. 3축 안정화 시스템(짐벌)을 이용하여 외란에 강한 안정적인 영상의 취득과 모니터링이 가능하고 모듈의 장착을 통하여 기능의 확장성이 뛰어나다. 또한 RF통신을 이용하여 최대 1km까지 GUI를 이용한 제어가 가능하고 목적지의 GPS 좌표로 자동으로 항해하는 기능을 갖추고 있다.
2.1. 작품의 개발배경 및 필요성
인간의 한계를 뛰어넘어 목적의 달성을 위한 도구의 필요성과 화석연료를 기반으로 하는 많은 양의 에너지를 소비하는 기존 선박의 한계로 인해 일정 목적에 사람이 직접 가지 않고도 특수 목적의 수행과 달성을 위한 도구의 개발 필요성 증대
2.2. 작품 기능
· 실시간 촬영 영상 모니터링 : 카메라를 활용하여 실시간으로 영상을 촬영하고 노트북으로 전송하여 모니터링
· 카메라 흔들림 보정 : 카메라 짐벌을 PID 제어기를 통해 안정적으로 흔들림을 제어
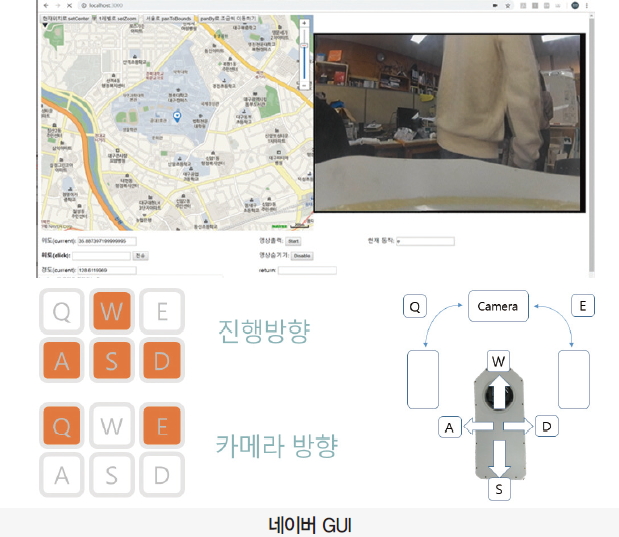
· MAP & Control GUI : 네이버 지도 API를 사용하여 GUI구축
· GPS를 통한 CHASING : 현재 위치를 지도에 표시할 수 있고, 지도상에 목적지를 표시하면 그 지점으로 이동
· 모터 구동 및 진행 방향 제어 : 노트북의 키보드를 통해 선체의 속도와 방향을 제어
2.3. 작품의 기대효과 및 활용분야
· 인명구조 측면에서의 구조요원을 통한 해결보다 수상로봇을 통한 해결의 우수성 강조
· 기존 드론에 비해 장시간 운용 가능
· 4차 산업혁명과 자동화, 무인화 시대에 MAGS를 기반으로 한 지속적인 개발로 인공지능, 자율주행, 다목적 모듈적용을 통해 4차 산업혁명을 이끌어 나갈 수 있음
· 현재 내연기관(디젤,가솔린 엔진)의 단점을 배터리를 통해 전기적 모터를 구동하고, 유인선박의 한계를 극복한 무인선박의 필요성이 대두됨
· 문화적 측면에서 점점 많은 사람들이 해양 레저 스포츠를 즐김에 따라 이를 촬영하고, 해양생태계 관측에 용이
3. 작품 설명
3.1. 주요 동작 및 특징
· RF 통신모듈 제어 및 설정 : RF 모듈 RTX262 세팅 및 UART 설정
· 가속도/자이로/지자기 센서 설정 및 측정 : 자이로/가속도 센서 raw데이터를 받아 pitch/roll/yaw값으로 변환
· 네이버 지도 API를 활용한 목적지 및 위치 파악 : 네이버 지도 API를 이용하여 현재 위치와 목적지의 좌표값을 얻음
· 상보 필터에 센서값을 필터링 : IMU를 통해 얻은 Pitch / roll / yaw 값을 상보 필터를 통하여 안정화
· UART, I2C 통신 설정 : RF 및 GPS를 사용하기 위한 UART 설정, IMU 사용을 위한 I2C 통신 설정
· GPS 기반 목표지점 Chasing : GUI에서 설정한 목표 값을 RF 통신으로 받아 목표 위치로 이동하기 위한 알고리즘
· BLDC 모터 위치/속도 제어 : BLDC모터의 위치 및 속도 제어를 위한 알고리즘

PCB Art work
회로 설계 이후 PCB Artwork을 통하여 메인제어보드 및 모듈 어보드 제작
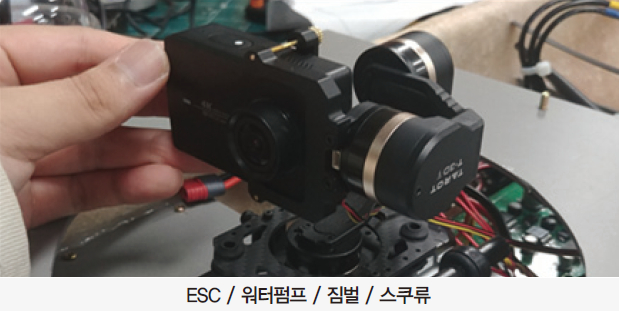
BLDC모터 속도 제어 (ESC)
BLDC모터 속도 제어를 위한 Electric Speed Controller
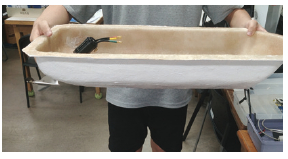
유리섬유 선체
자체제작한 유리섬유와 FRP를 이용한 선체 다른 소재에 비해 가벼우며 튼튼함
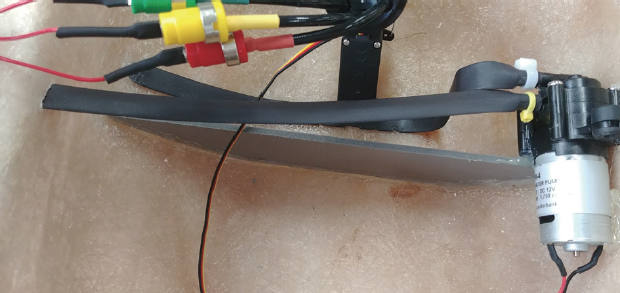
침수 방지 워터 펌프
혹시 모를 침수를 대비해 물을 밖으로 빼내기 위한 장치
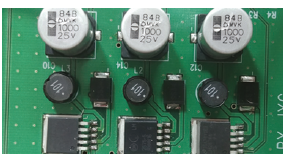
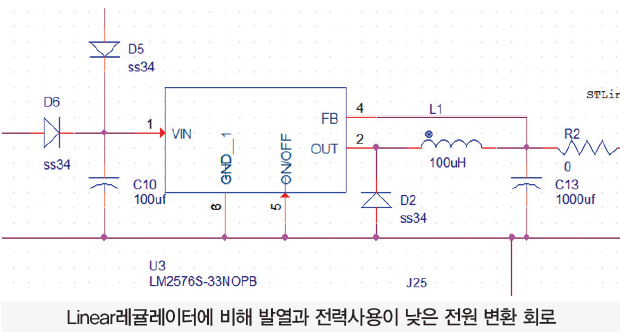
스위칭 레귤레이터 전원회로
Linear 레귤레이터에 비해 발열과 전력사용이 낮은 전원 변환 회로
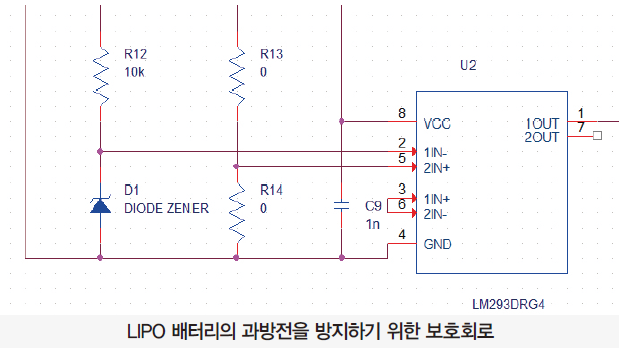
over discharge protect circuit
LIPO 배터리의 과방전을 방지하기 위한 보호 회로
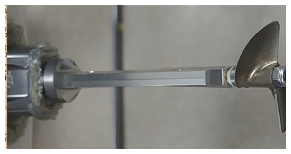
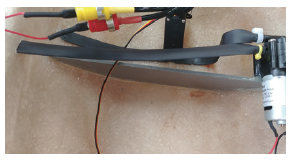
스쿠류
선체의 이동 속도 조절
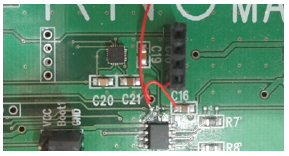
IMU센서 주변회로
IMU센서 구동 및 통신을 위한 주변회로

3axis Gimbal
선체의 자세 변화에도 일정한 방향으로의 영상 획득
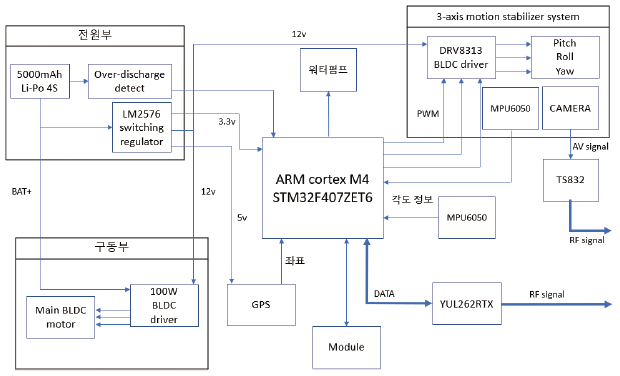
3.2. 전체 시스템 구성도
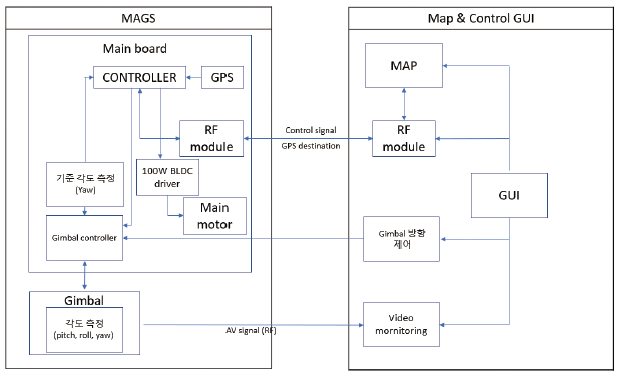
3.2.1 HW 구성도
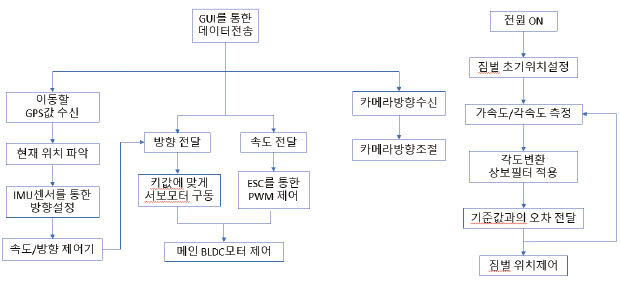
3.2.2 SW 구성도
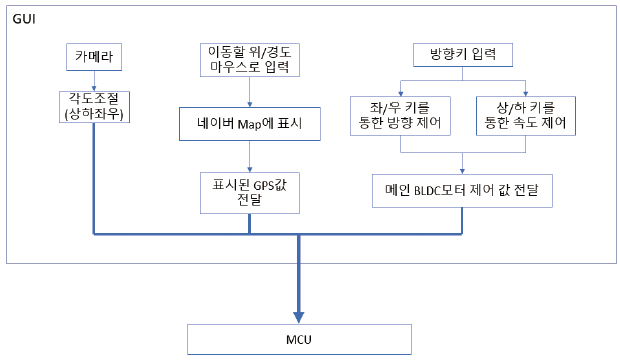
3.2.3 GUI 구성도
3.3. S/W
3.3.1. 실시간 촬영 영상 모니터링
수상활동을 카메라를 이용하여 촬영, 영상을 노트북으로 전송하여 모니터링, 키보드를 통해 카메라의 방향/각도를 조종하며 다방면으로 촬영 가능하게 한다.
3.3.2. MAP & Control GUI
· 네이버 지도 API와 node.js를 이용한 GUI
· 영상 모니터링 가능
3.3.3. GPS를 통한 CHASING
· 현재 위치를 지도에 표시하고, 지도상에서 다음 목적지를 결정하면 해당위치로의 이동을 통한 반 자율주행 구현
3.3.4. 모터구동 및 진행방향제어
· 노트북의 키보드를 통해 원하는 방향 이동 및 속도 조절
· BLDC모터 구동 알고리즘 및 ESC 제어
3.4. H/W
3.4.1. 배터리 보호 회로
· 배터리의 과방전을 방지하기 위한 회로
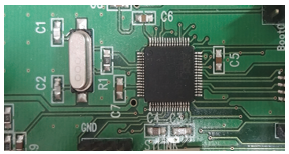
3.4.2. cortex M3, 주변회로구성
· 칩 동작을 위한 주변회로 구성
· 해당 칩의 기능을 이용한 전체 동작구현
3.4.3. 선체 방수, 내구성, 중량
· 선체를 FRP와 유리섬유를 이용하여 가볍고 튼튼하게 제작
· 선체내부에 물이 들어가지 않게 윗부분을 덮음
· 최대 15kg의 중량을 견딜수 있도록 제작
3.4.4. 모터 구동 회로
· 워터펌프 및 모터 구동
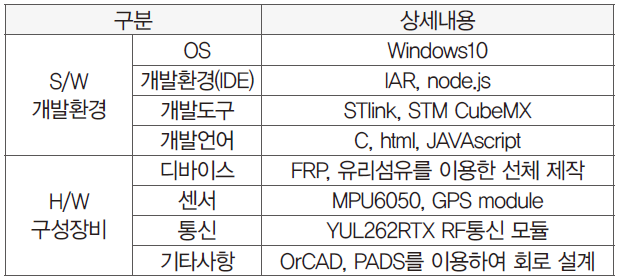
3.5. 개발 환경
3.6. 적용 기술
3.6.1. 과충전 방지 회로
LiPo 배터리는 각 셀당 3.7V의 전압을 가지고 있다. 최대 충전식 약 4.2V, 최대 방전시 약 3V의 전압을 가지게 된다. 하지만 과충전이나 과방전을 하면 배터리가 정상적으로 동작하지 않을 수 있으며 과충전의 경우 심하면 폭발의 위험이 있다.
또한 과방전시 배터리를 다시 사용할 수 없게 되기 때문에 이를 방지하는 회로의 구성이 필요하게 되었다.
따라서 제너다이오드와 비교기를 이용하여 일정 전압 이하로 떨어졌을 때 비교기 출력이 변화하여 MCU에 상태를 알리게 되고 이때 전류를 많이 사용하는 부분의 전류를 차단시키거나 사용자에게 경고를 줄 수 있다.
3.6.2. Complementary Filter
IMU 센서에서 측정된 3축 가속도, 3축 각속도 데이터로 3축 가속도로 계산한 각도와 3축 각속도로 계산한 각도를 구할 수 있다. 3축 가속도 센서에서 나오는 가속도 값은 AZ, AY, AZ이고 3축 자이로 센서에서 나오는 각속도 값은 ![]() 이다.
이다.
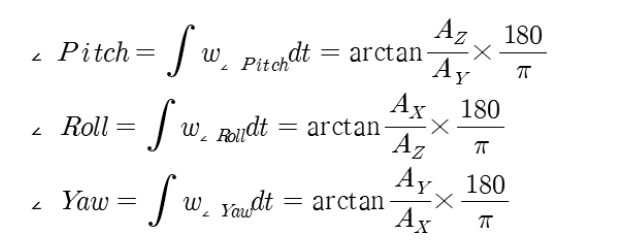
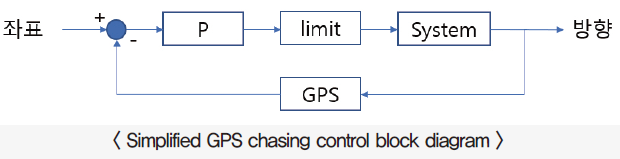
식 (1)을 그대로 사용해서 각도를 구하면 측정값에 잡음이 많이 생겨 오차가 크다. 따라서 보다 정확한 각도를 추출하기 위해서 1차 상보필터를 사용한다. 다음은 간략화 된 1차 상보필터의 블록선도이다.
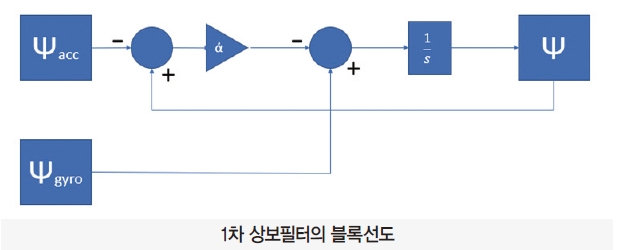
상보 필터는 두 가지 이상의 다른 센서가 상반되는 성질을 가질 때 사용할 수 있다. 각속도 데이터를 적분한 결과로 나타나는 각도는 고주파 영역에서 응답 특성이 좋기 때문에 고역통과 필터를 사용하고 가속도 데이터로 계산된 각도는 저주파 영역에서 응답 특성이 좋기 때문에 저역통과 필터를 적용시키고 이를 합한다.
필터 계수 α= 0.96으로 설정하였다. 이를 통해 각 센서의 잡음을 제거 하여 안정적인 각도 값을 획득할 수 있었다.
3축 지자기 센서를 사용하여 측정된 지자기 데이터는 Xmg. Ymg. Zmg이다. 지자기 데이터로만 Yaw각을 계산하면 기울어짐에 대한 오차가 생긴다. 1차 상보필터의 출력 값인 Pitch(Φ), Roll((θ)과 Xmg. Ymg. Zmg을 입력으로 사용한다.
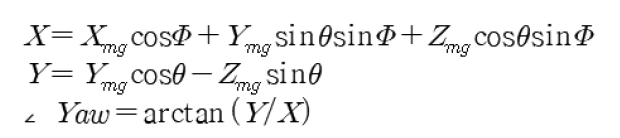
식 (2)으로 지자기 센서에서 보다 정확한 Yaw 각을 구할 수 있다. 가속도/ 자이로 센서에서도 Yaw 값을 구할 수 있지만 가속도 센서로는 Yaw값을 검출할 수 없고 1차 상보필터를 거쳐 나온 Yaw값은 자이로 센서의 적분값만 존재하기 때문에 오차발생이 필연적이다. 실제 사용하는 Yaw각은 자이로 센서의 각속도를 적분하여 계산한 값이고 지자기 센서에서 구한 Yaw각은 선체가 바라보고 있는 방향으로 기준점을 잡는다.
3.6.3. 침수 방지 워터 펌프
침수 방지 워터 펌프에는 추가적으로 수위센서를 제작하고 장착하여 구동부로 새어 들어오는 소량의 물을 밖으로 퍼내는 역할을 하게 된다.
3.6.4. 네이버 지도 API를 활용한 목적지 및 위치 파악
Naver 지도의 API와 node.js를 이용하여 웹상에 GUI를 구성하고 RF통신모듈을 이용하여 MAGS와 통신을 한다. 통신 프로토콜을 설계하여 정보를 구분하고 지속적인 통신을 통하여 수동/자동 운항과 함께 현재 위치정보를 업데이트 한다.
3.6.5. GPS chasing
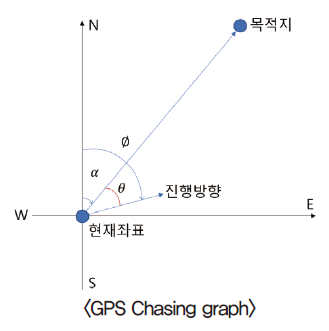
GPS chasing을 위하여 현재 좌표와 이동할 좌표의 위,경도 값을 비교하고, 삼각 함수를 이용한 계산을 통하여 위치의 변위를 통해 벡터값의 방향과 크기를 파악한다.
X,Y좌표계에서 현재 좌표를 원점으로 한다. 지자계, 자이로, 가속도 센서값과 필터를 통해 자북을 기준으로 하는 yaw값을 구하고 자북으로 부터의 Φ각을 계산한다. Φ 각을 이용해 진행 방향으로의 단위벡터를 구할 수 있고, 목적지의 위, 경도 좌표를 이용하여 Φ각을 계산한다. 이를 이용하여 샘플링타임을 통해 θ각을 계산하여 서보모터의 방향을 결정한다.
장애물 회피나 GPS 및 IMU 오차로 인한 오작동으로 발생할 수 있는 상황을 제어하기 위해 일정한 속도로 주행하게 하였다. 자율 항해 중에도 즉시 수동조작 모드로 바꾸어 상황에 쉽게 대응할 수 있다.
θ각을 지속적으로 계산하여 오차를 줄이는 방향으로 이동한다. 그리고 현재 좌표와 목적지 간의 크기벡터를 계산하여 목적지까지의 거리를 계산한다.
3.7. 기대 효과 및 활용 분야
3.7.1. AI를 통한 Multi Control
최근 드론에 대한 관심이 증가하면서, 일반인뿐 아니라 군에 이르기까지 다양한 분야에서 활용되고 있다. 다중 제어를 통해 한 대를 운용할 때 보다 넓은 범위의 해저, 해상 탐색이 가능하며 탐사 지역의 정보를 실시간으로 획득할 수 있다. 또한 군의 해상 중요 임무 수행 성공 확률을 높일 수 있고, 예술과 융합되어 임무를 수행하는 등 다양하게 활용될 수 있다.
3.7.2. 다목적 개발가능
해상 경계 , 모니터링, 녹조-적조처럼 자연현상 관측과 탐사 등 여러 가지 목적을 위한 도구로 사용
3.7.3. 4차 산업혁명과 무인화
MAGS를 플랫폼으로 하는 지속적인 개발 및 객체 인식기술을 통해 사람의 감각기관중 가장 많은 정보를 받아들이는 시각정보를 컴퓨터로 대신 분석할 수 있게 한다. 이를 활용하여 장애물 회피, 특정 물체 감시 및 추적촬영을 가능하게 한다.
3.7.4. 사회적 측면 기대효과 / 무인선박의 필요성
최근 미세먼지, 지구온난화 등의 환경문제가 대두되면서 육상의 내연기관인 자동차 또한 전기자동차로의 대체와 배출가스 저감의 필요성이 커지고 있다.
해상 또한 마찬가지 상황으로 오염물질 배출기준이 높아져 기준 이하의 선박은 항구 입항이 금지되고 있다고 한다. 따라서 이슈화되고 있는 배출가스 저감을 위한 방법을 도출해낼 필요성이 증가하였다. 이에 대한 방안으로 배터리를 에너지원으로 사용하며 효율은 약 60% 정도로 기존 내연기관인 가솔린, 디젤 엔진의 10%~18%의 효율에 비해 월등하다. 앞으로도 지속적인 효율증가가 기대되고, 태양광 모듈 등을 통한 재충전으로 지속적인 임무 수행이 가능하다.
기존 선박의 경우 사람이 탑승하기 위해 정해진 규격, 요건을 충족해야하며, 기상조건에 따라 사람이 진입하기 힘든 상황이 발생 할 수 있으므로 무인 선박의 필요성이 높아지고 있다. 무인화를 통해 선박의 소형화가 가능하여 앞으로는 이동거리와 기상조건에 구애받지 않으면서 원하는 목적을 수행할 수 있으며, 비용 절감 효과도 크다.
3.7.5. 활용분야
기존의 해변에서는 해상 안전을 책임지고, 인명구조를 위한 방안으로 인명구조요원을 배치하고 있다. 허나 매년 여름 해수욕장에서 물놀이 사고가 끊이지 않고 있다. 이유에는 여러 가지 요인이 있겠지만, 이중에서도 육지에서 높은 곳에 위치하여 인원을 통제하는 안전요원이 사고지점까지 이동하는 시간이 길다는 것이다. 해상에서 대기하던 MAGS를 이용하여 주변상황을 모니터링할수 있으며, 또한 사고지점까지 신속한 접근이 가능해지고, 해변의 안전 지역을 벗어나는 피서객의 통제가 한층 수월해 진다.
카메라를 통한 안정적인 영상 촬영을 활용할 수 있다. 수상 레저나 해양 스포츠에서 카메라 촬영을 할 때 카메라를 장착한 부분이 흔들리면 영상 또한 흔들릴 것이다. 하지만 수상 로봇의 카메라는 흔들림에 대한 보정 기능이 추가되어 거친 환경에서도 안정적인 촬영 영상을 획득할 수 있다. 또한 공중의 드론에 비해 작은 소음 덕분에 해양 생물 관찰에도 적합하다.
GPS 좌표 값을 활용하여 지도상에 표시한 위치로 이동이 가능하다. 이는 사람이 특정 지역에 접근하기 어렵거나 그렇지 못 할 경우에 원격으로 원하는 위치까지 자동으로 이동시킬 수 있다는 것을 의미한다. 이와 동시에 GPS 좌표 값을 계속해서 받아옴으로써 현재 위치도 원거리에서 확인이 가능하며, 주변 영상 또한 카메라로 받아 실시간으로 확인 할 수 있다.
4. 단계별 제작 과정
4.1. H/W 제작
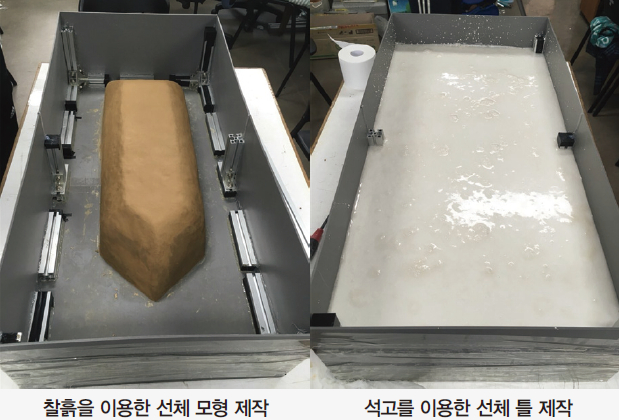
4.1.1. 선체 제작 방법 고안
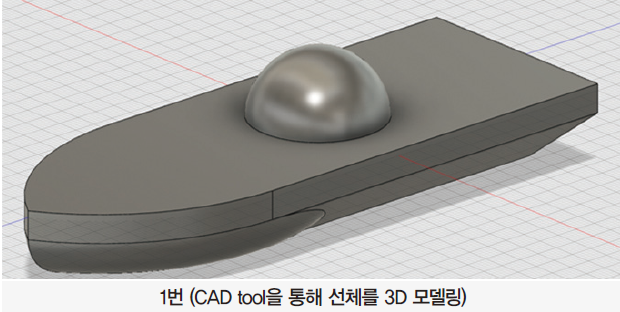
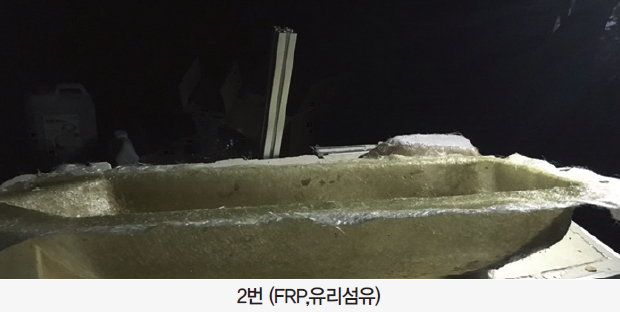
CAD tool을 통해 선체를 3D 모델링한 1번의 경우와 2번 FRP와 유리섬유를 통한 제작을 비교해 보았을 때, 1번의 경우 많은 비용이 발생하여 2번의 방법 선택

5. 회로도
5.1. over discharge protect circuit
5.2. 스위칭 레귤레이터 전원회로