대용량 모터 연결하기
동영상 강의를 하면서 항상 MW DCM 시리즈를 대상으로 했는데요. 이번에는 대용량인 MW-MDC24D500D모델을 대상으로 할려고합니다. 기능과 운용방법은 동일하기 때문에 이전 강의를 참조하시면 됩니다. 이번에는 결선에 대해 이야기를 할려고 합니다.
MoonWalker MW-MDC24D500D 모델은 각 채널당 최대 연속 구동 전류가 40A인 채널이 2개가 있는 모델입니다. 용량이 높죠. 그래서 외형적 크기도 크답니다. 일단 이번 예제로 다룰 주행 로봇은

NT-TriWheel[바로가기]이라는 제품으로 그 안에 장착된 모터가 용량이 높습니다.

위에 보이는 사양대로 높죠. 어차피 10A만 넘어가도 MW-MDC24D200 시리즈로는 구동시키기 어렵습니다. 그래서 MW-MDC24D500 시리즈로 구동을 해보는 예제로 괜찮을 듯 합니다.
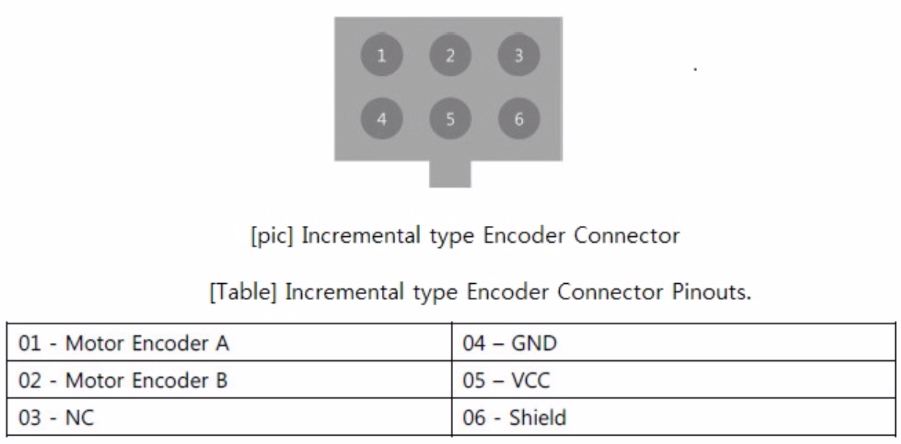
DCL 시리즈의 엔코더 연결 커넥터의 핀맵입니다.
그에 따른 배선도 입니다. 이전 동영상 강의까지 다 보셨다면 큰 무리없이 잘 연결하실 거라 생각합니다.

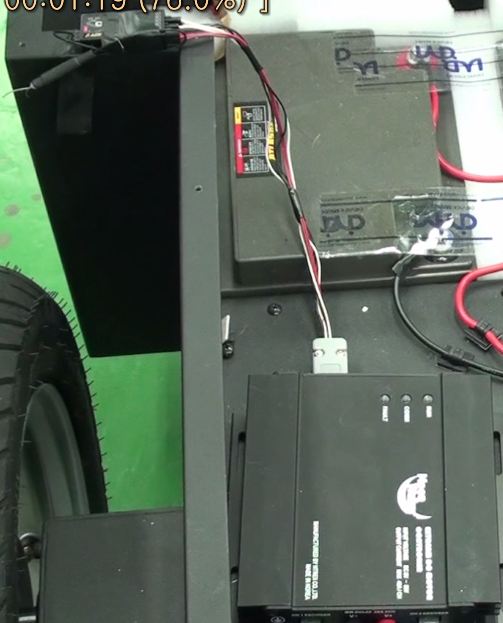
대용량이다 보니 MW-MDC24D500시리즈는 일반적인 작은 시스템에 비해 굵은 선을 사용하고 있는데요. 그래서 위와 같이 연결하시는게 좋습니다.


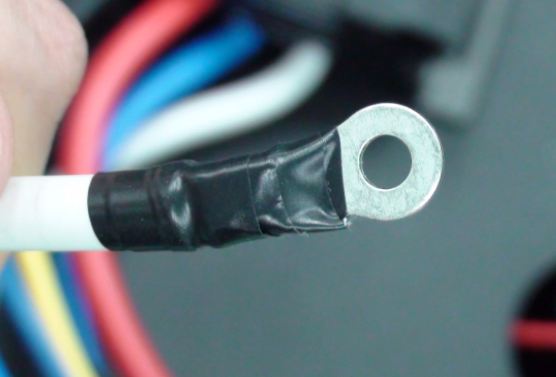
안전을 위해 마무리는 절연테이프로^^
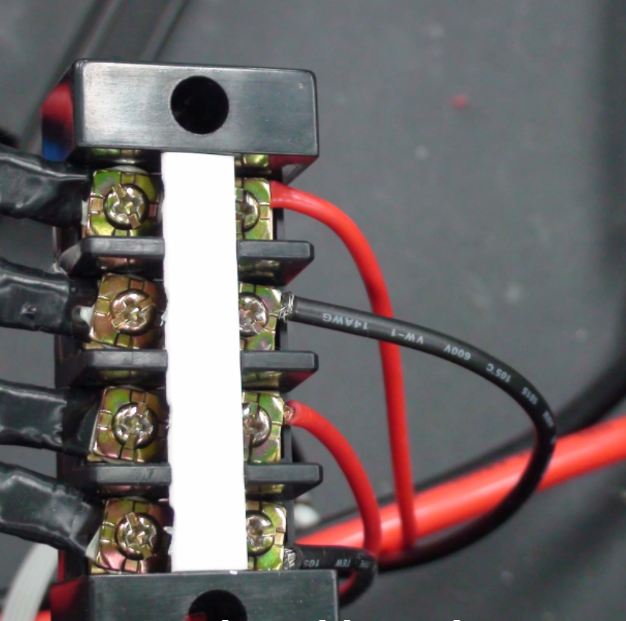
그리고 이렇게 전원과의 연결도 터미널 블럭을 사용하시기를 권장합니다.
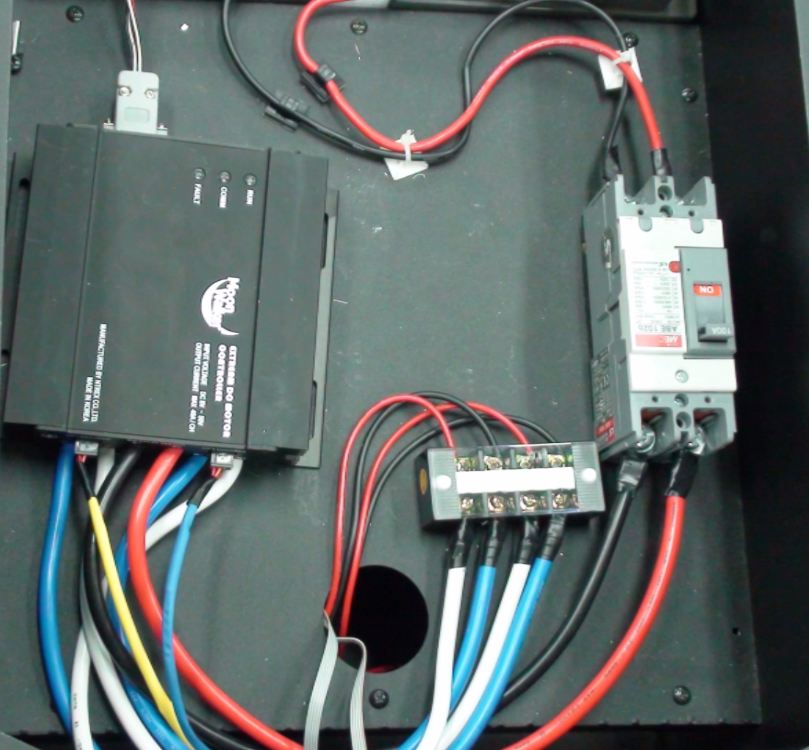
연결을 모두 다 완료한 모습입니다.
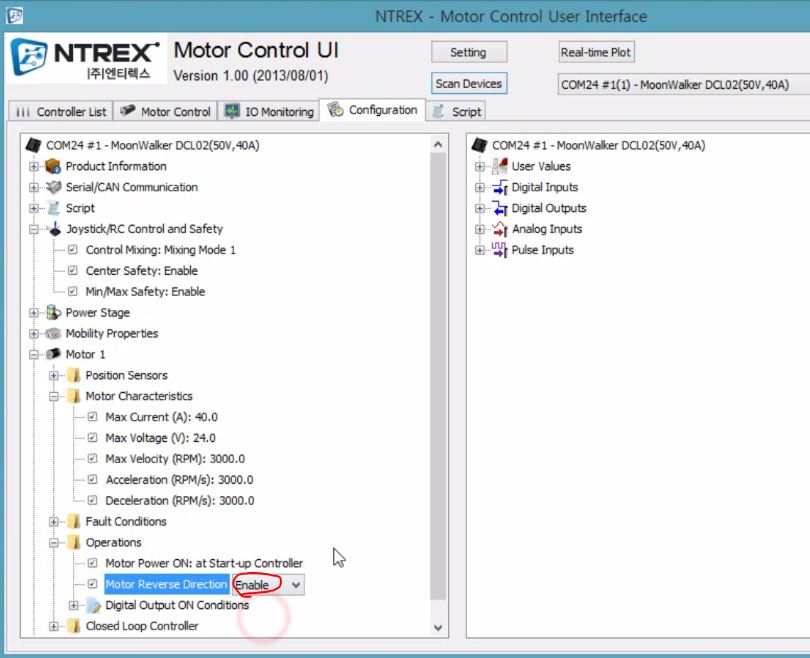
이미 여러면 나왔지만, 2채널형 모터 제어기를 두 바퀴 구동형으로 연결하시기 위해서는 한쪽 모터를 역방향으로 세팅하셔야합니다.
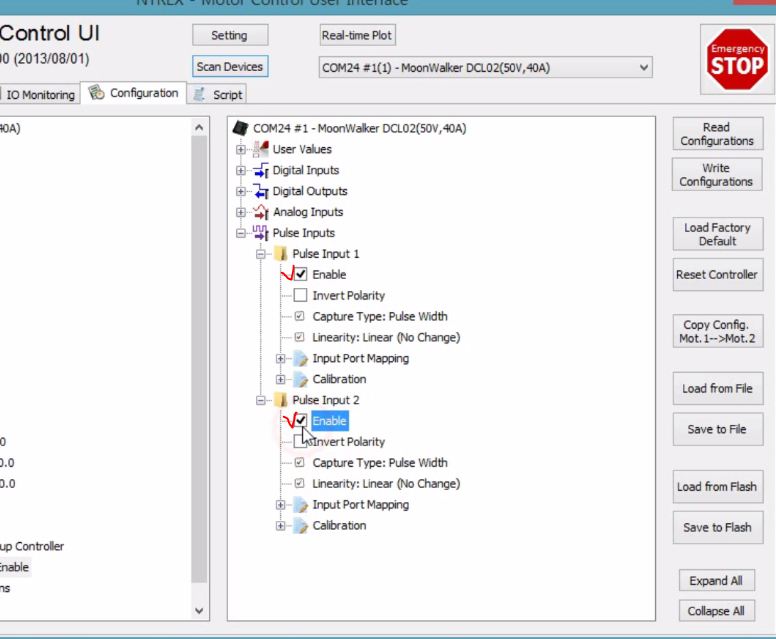
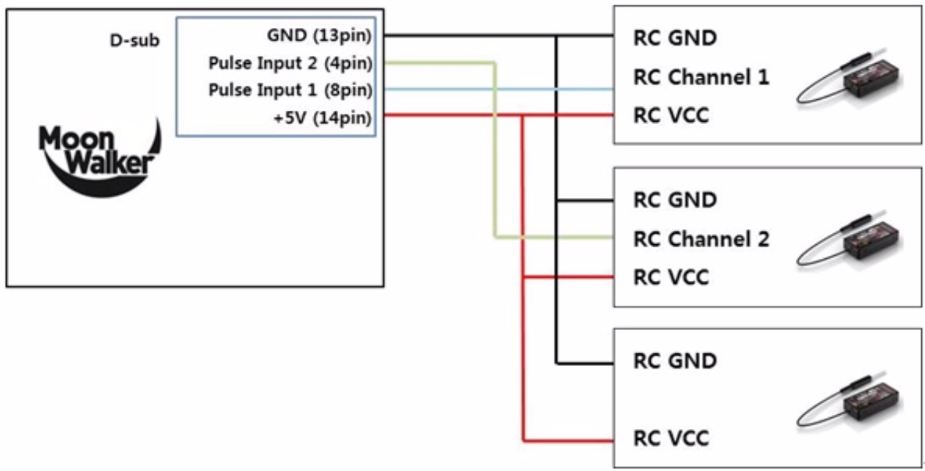
그리고, Pulse Input을 모두 Enable 시키시구요. 만약 속도나 토크 제어기가 세팅되기를 바라셨다면, [바로가기]에 나타난 대로 속도나 토크 제어기의 게인값을 사용자의 환경에 맞게 맞추셔야합니다. 그리고 RC 조종기의 다양한 설정을 하시기 위해서는 [바로가기]에서처럼 설정을 바꾸고 테스트를 해보셔야합니다. 꼭, 모든 설정을 마친후에는 Write Configuration과 Save to Flash를 잊지 마시구요.
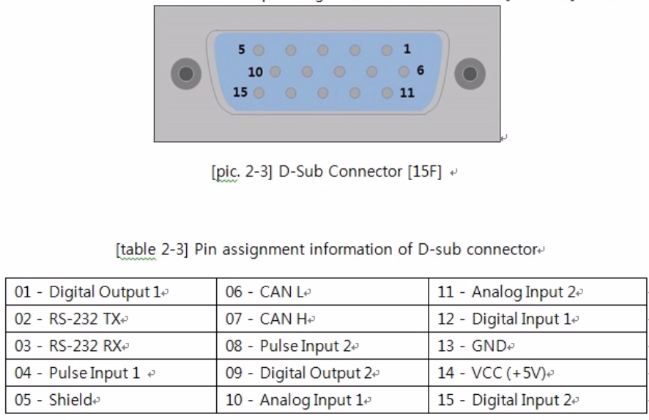
그리고 RC 리시버와 연결하시면 되지요. 요즘 나타난 동영상에서 저희가 계속 사용하는 RC 리시버와 DSub15핀 커넥터를 연결하는 저 케이블도 문의하시는 분이 많아서 곧 액세사리로 등록할 예정이랍니다.^^


