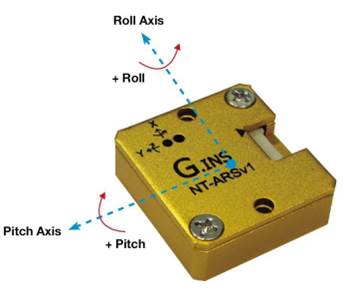
NT-ARSv1 CAN 통신하기
NT-ARSv1의 CAN 통신을 사용위한 연결 방법입니다.
먼저 PC에서 USB 포트를 이용하여 CAN bus를 쉽게 접근하기 위해서는 USB to CAN bus 어댑터 모듈이 필요합니다.
저희는 11월중 순에 엔티렉스에서 출시 될 [ LinKerS USB2CAN ] 제품을 사용하였습니다.

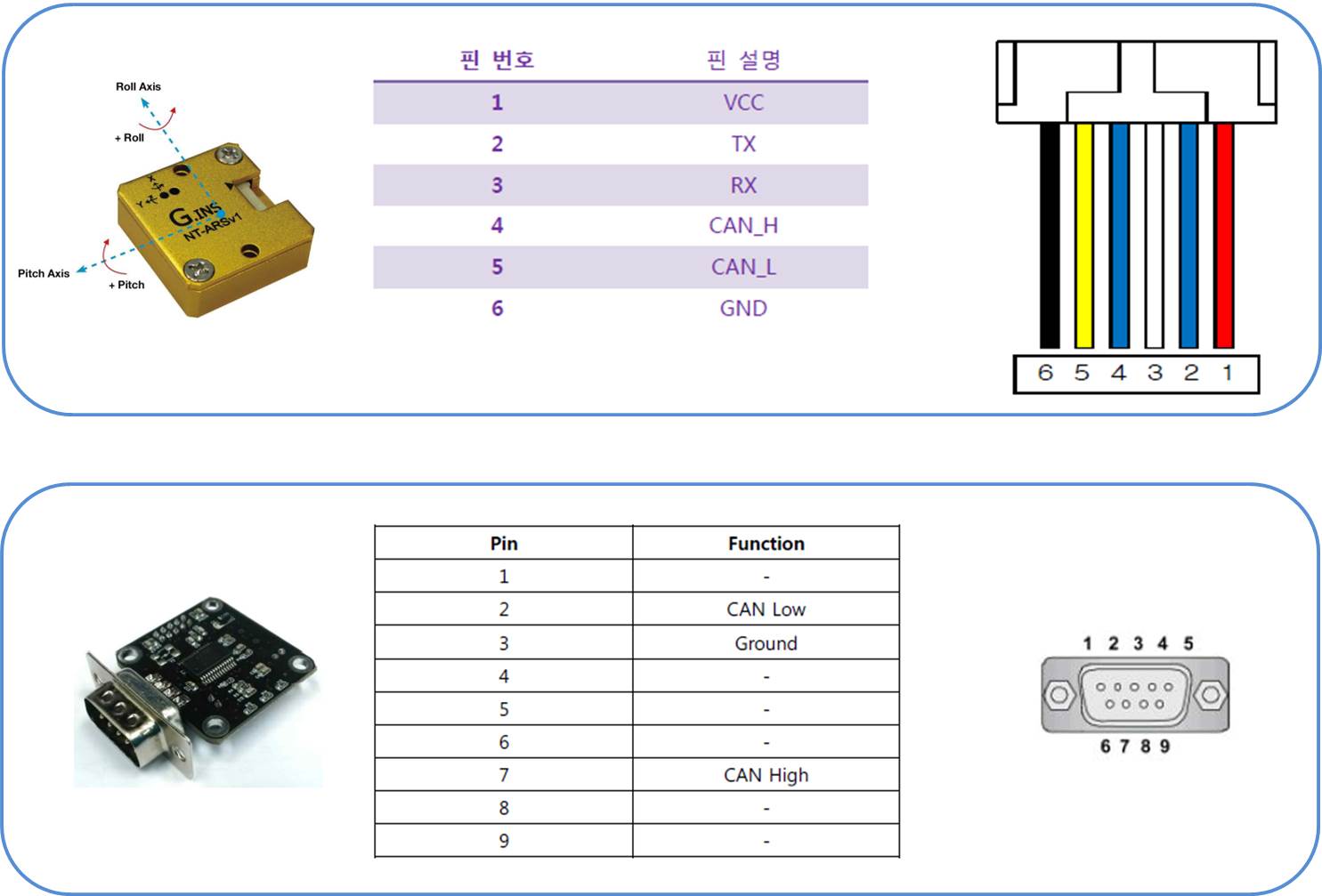
두 번째로 CAN통신을 위해 배선을 연결해 주어야 합니다.
NT-ARSv1의 4 pin(CAN H)을 USB2CAN의 7 pin(CAN H)에
NT-ARSv1의 5 pin(CAN L)을 USB2CAN의 2 pin(CAN L)에
그리고
NT-ARSv1의 6 pin(GND)을 USB2CAN의 3 pin(GND)에 연결해 줍니다.
마지막으로 NT-ARSv1은 CAN H/L 단자간 종단저항 120옴 정도가 필요합니다.
본글에서 예제로 사용한 CAN2USB의 경우는 간단히 점퍼 설정으로도 가능해서 처리했지만,
다른 장비를 사용하시는 경우는 종단저항을 연결하시기 바랍니다. (NT-ARSv1의 메뉴얼 참고)
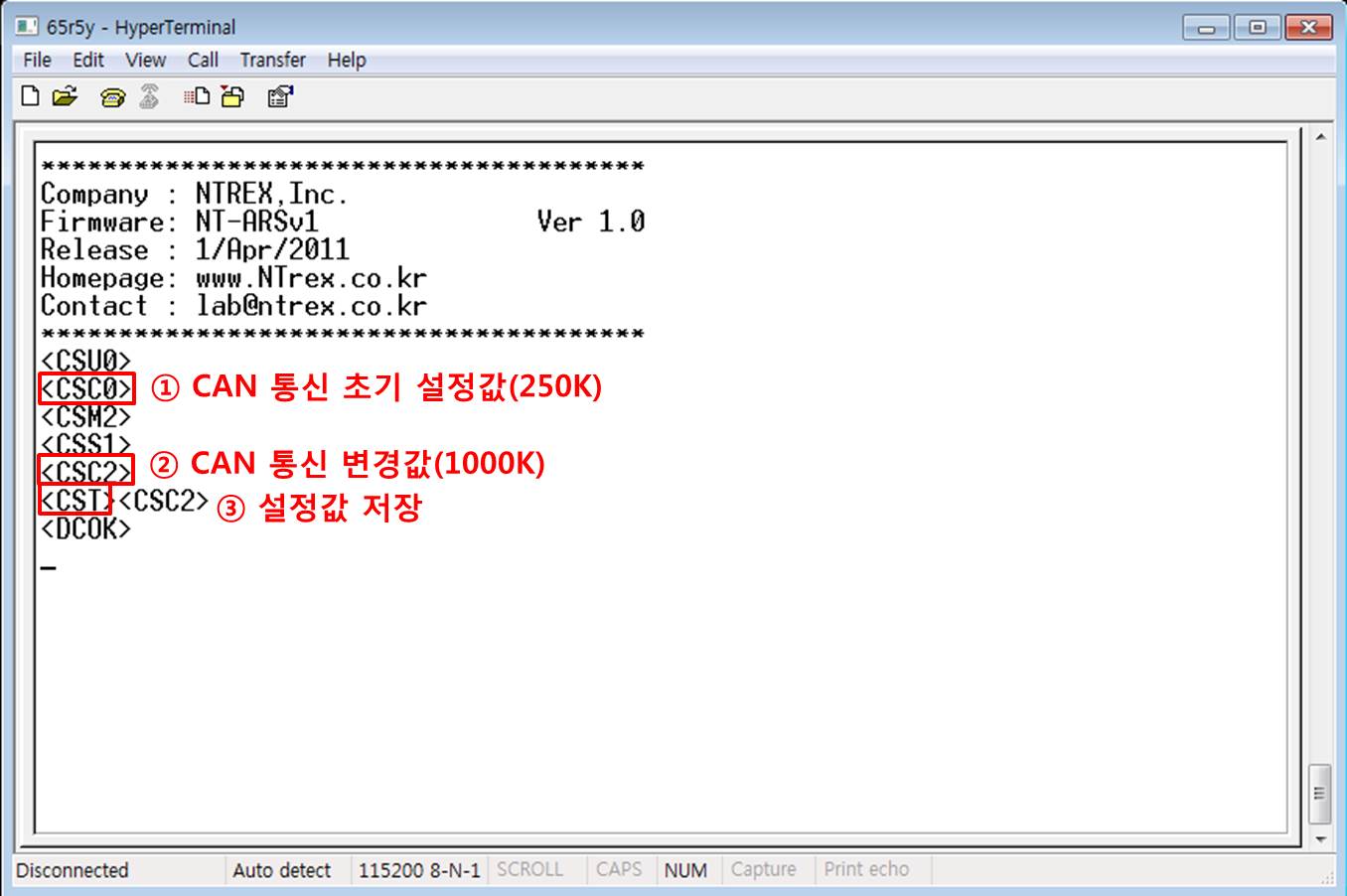
USB2CAN과의 배선 연결이 끝나면 세 번째로 CAN 통신 속도를 설정해 주어야 합니다.
최고 속도인 [ 1000Kbps ]로 설정해서 PC와 CAN 통신을 할 것이며,
NT-ARSv1의 CAN 통신 속도 초기 설정은 250Kbps로 되어 있기 때문에
아래와 같이 하이퍼터미널에 연결해서 통신 속도를 변경해 줘야합니다.
RS232로 PC와 연결후 <CSC2>명령으로 설정을 변경하고, <CST>명령으로 설정을 저장하면 됩니다.
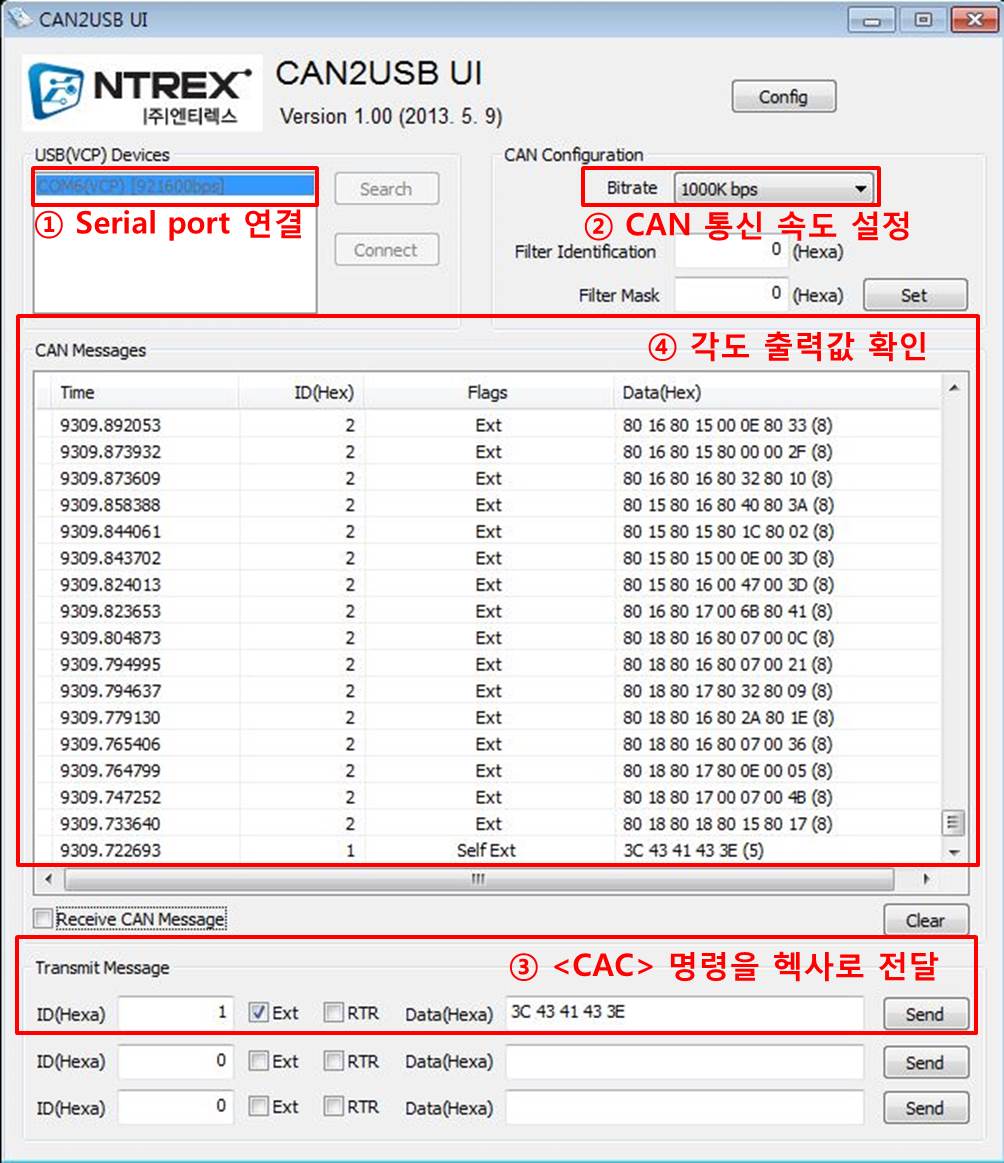
이제 모든 설정이 끝나면 PC에서는 USB2CAN User Interface(UI) 프로그램을 통해
(혹은 사용하시는 CAN 모니터링 프로그램을 통해) CAN 통신의 정상 유무를 확인합니다.
Nt-ARSv1의 각도값 출력인 <CAC> 명령어를 통해서 CAN 통신이 정상 유무를 확인해 보겠습니다.
먼저 USB2CAN UI 프로그램에서 검색된 가상 시리얼 포트에 연결한 후 CAN 통신 속도를 설정합니다.
그리고 마지막으로 NT-ARSv1 명령어 데이터를 입력하고 전송하면 됩니다.
이때 전송 할 명령 데이터는 헥사(Hexa)로 변환해줘야 합니다. (<CAC>를 헥사로 변환하면 3C 43 41 43 3E가 됩니다.)
지금까지 NT-ARSv1와 USB2CAN을 가지고 쉽고 간단하게 CAN 통신하는 방법을 알아보았습니다.


