RC조종기를 이용한 MoonWalker 테스트
안녕하세요^.^
오늘은 현재 저희 연구소에서 개발중인 곧 출시를 앞둔 DC모터드라이버 MoonWalker Series의 구동법을 살펴보려고 합니다.
앞선글에서 Moonwalker에 대해 설명했었는데요 .
위 관련글에 나타내고 있는 구동방법중 오늘은
RC 조종기와 같은 디지털 신호를 이용하여 구동을 시켜보겠습니다 .
저희 Moonwalk 모터드라이버는 아주간단하게 연결만 해주면 RC조종기로 주행로봇을 컨트롤 할 수 있습니다.

외부 인터페이스 모습입니다.
이 모터드라이버를 저희주행로봇에 연결하여 구동을 시켜보겠습니다 .
주행로봇은 NT-Commander-I를 선택하였습니다 바로 요놈입니다

소형 주행로봇인데요 테스트용으로 안성맞춤이라 생각됩니다.
앞뒤좌우로 총 4개의 바퀴에 각각 모터가 달려있습니다.
이번테스트는 4개의 모터를 각각 구동시키는게 아니기때문에
좌우 모터를 각각 묶어 2ch로 사용을 하고 엔코더역시 좌,우 한개씩만 연결을 해주도록 합니다.
모터드라이버와 전원,그리고 RC조종기의 수신기는 아래의 그림을 참고하여 연결해주도록 합니다.
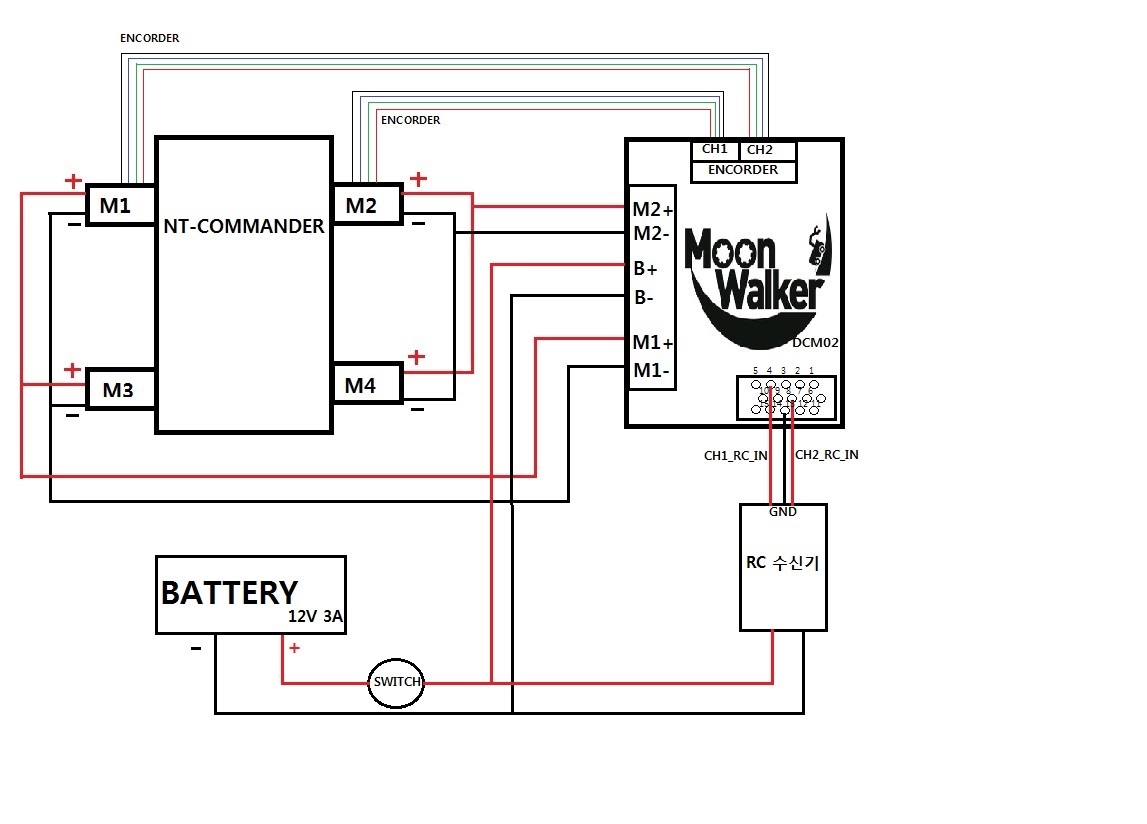
그림에서 보듯이 모터는 좌,우를 묶어주었고 엔코더는 각방향에서 1개씩만 사용하였습니다.
배터리는 12V 3A용량의 리튬인산철 배터리를 사용하였으며 전원 ON/OFF를 위해 스위치를 연결해주었습니다.
또한 MoonWalker 의 D-SUB15 단자에서 CH1_RC_IN(4번), CH2_RC_IN(8번),GND(13번)핀을 RC수신기의 1,2번 CH에 연결해주었습니다.
D-SUB15의 핀배열은 아래와 같습니다.
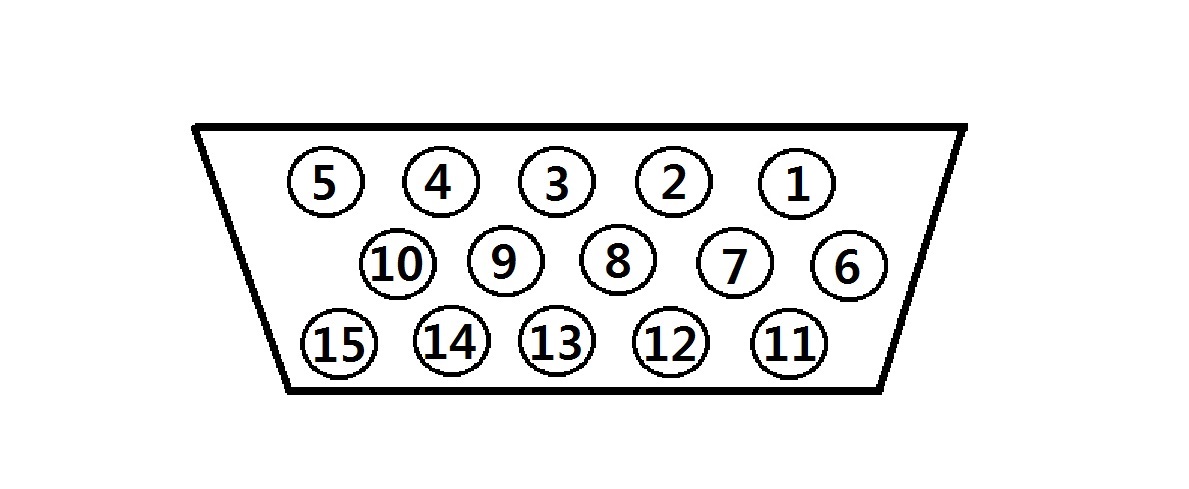
위 사진을 참고하여 RC수신기와 연결을 해줍니다.

이렇게 하여 조립이 완성된 모습입니다.

옆면에 RC조종기 수신기를 달아주었고
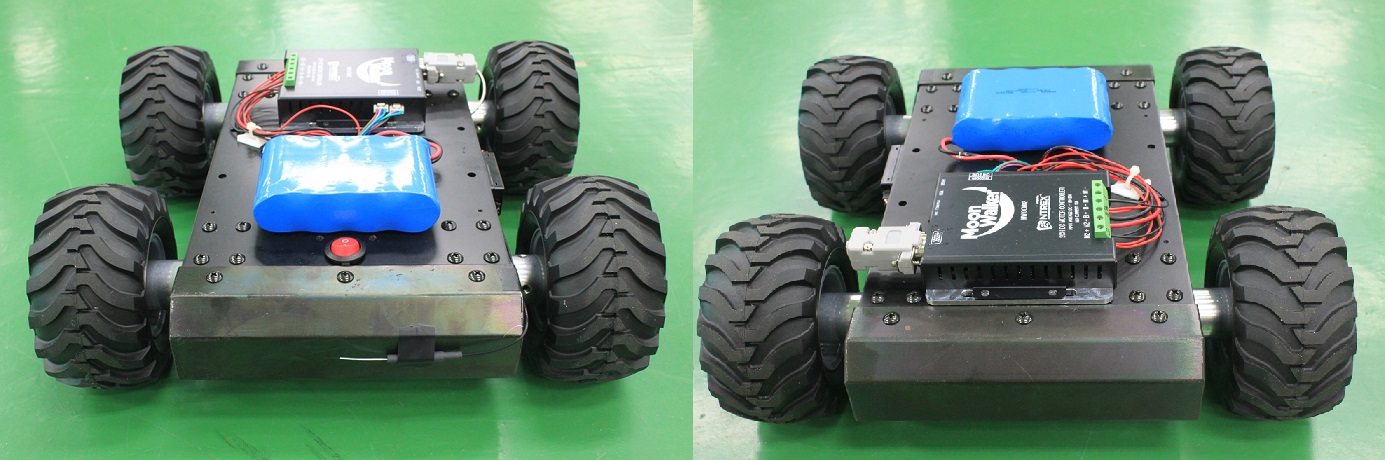
뒷면 앞면모습입니다.

이게 뒤집힌 모습이구요.
조립이 완료되었으면 추후 공개될 저희 MotorControl UI프로그램을 통해 RC 조종기 min/max 범위 설정과
센터 부근의 dead-band 영역 설정 그리고 입력 신호에 대한 calibration과 linearity 설정 을 해주어야 합니다.
RC조종기와의 calibration과 linearity를 설정하는 방법을 간단하게 사진으로 설명하자면
UI프로그램을 실행하고 포트연결후 Configuration으로 들어가면
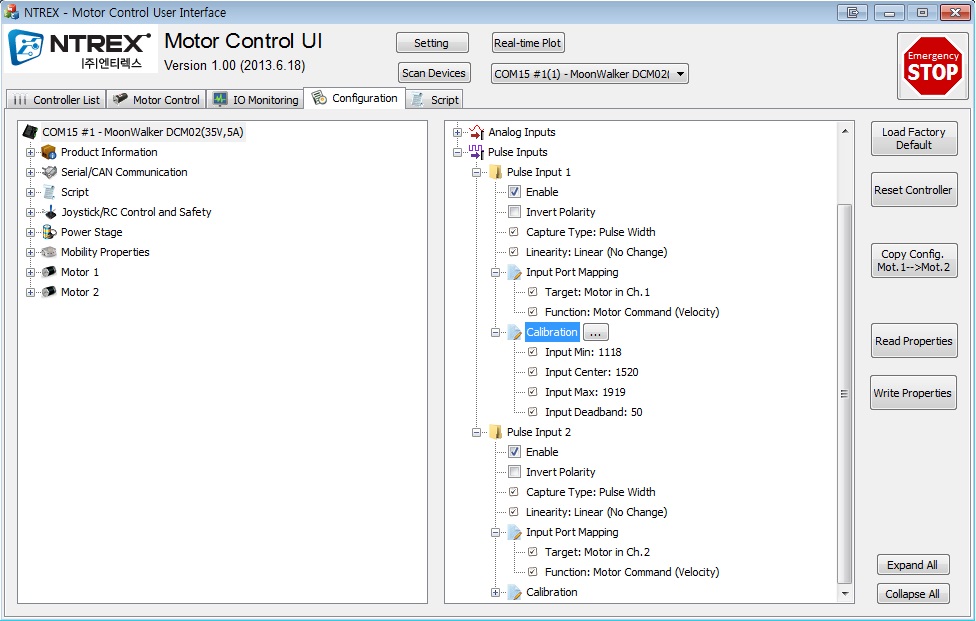
위와같은 화면이 나오는데요 여기서 Pulse Input란으로 들어가보면 Pulse Input1과 2를 각각 설정해 줄수 있는 부분이있습니다.
바로여기에 위사진에서 보듯 Calibration을 설정하는 란이 있습니다. 위 Calibration을 누르면 옆에 … 으로 표시된 버튼이 나오는데요 이버튼을 누르면
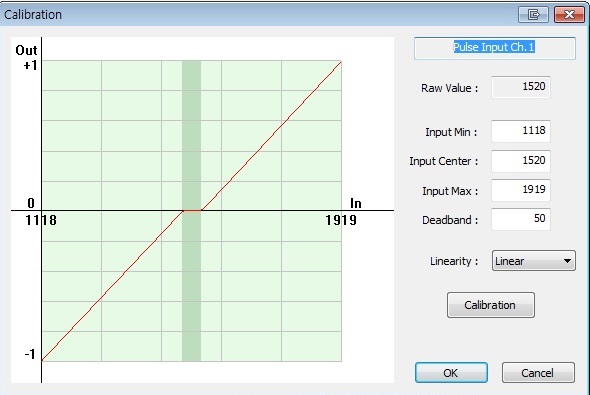
이런 화면이 나옵니다 . 조종기와의 Calibration을 설정해주는 부분인데요 설정을위해 Calibration이라고 써져있는 버튼을 먼저 누르고
조종기를 상하좌우로 움직여주며 설정을 해줍니다 .설정후 다시 Calibration버튼을 누르면 설정이 저장됩니다.
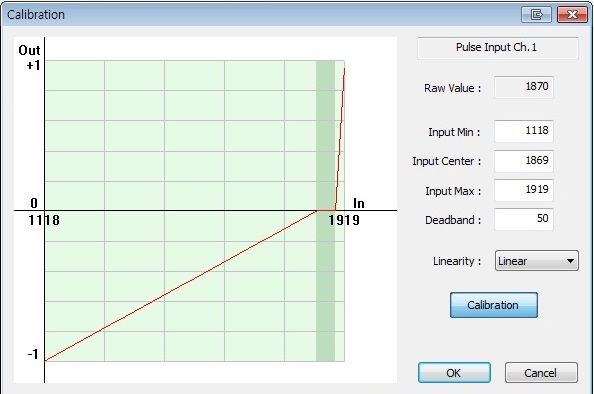
그다음 사용자의 환경에 맞게 Deadband및 Input값의 max,min값을 따로 설정해 주셔도 됩니다.
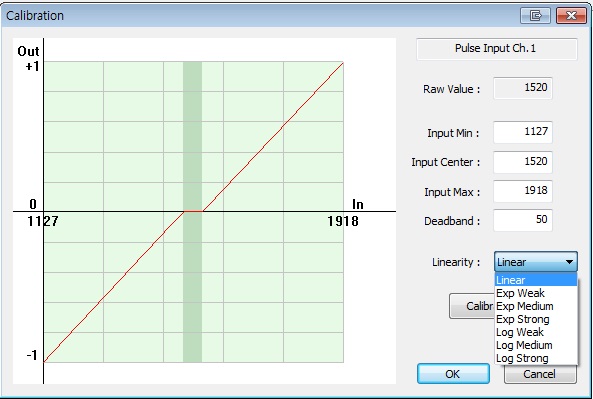
또한 Linearity설정도 위사진에서 보이는 대로 스크롤을 내려 설정해준다음 마지막으로 OK버튼을 눌러주면 모든설정이 완료됩니다.
OK버튼을 누르고 메인창으로 빠져나온뒤 꼭 Write Properties버튼을 눌러줘야 MoonWalker에 설정값이 저장됩니다.
또한 저희 MoonWalker의 특징은 Joystick/RC 조종기를 사용하여도 속도/전류 제어기 설정이 가능하다는 점인데요
그래서 이번 테스트에서는 속도제어를통해 구동을 시켜보도록 하겠습니다.
내용은 동영상으로 첨부하겠습니다. 동영상을 보면 속도제어기가 동작하는 모습을 확인할 수 있습니다.


