[15호] 6자유도 관성 측정 장치 RTxQ 출시
Posted by 디바이스마트 매거진 on Saturday, October 20, 2012 · Leave a Comment

루바테크(www.ruva.kr)에서 짐벌락이 없으며, 9축센서를 내장한 6자유도 관성 측정 장치인 RTxQ를 출시했다.
전원 인가 후 80ms 이내에 안정된 데이터를 다양한 출력 모드로 제공하며, 최대 256Hz까지 지원한다.
다중모드 칼만 필터, 오일러/쿼터니언 복합 알고리즘 등 정밀한 알고리즘을 통해 높은 신뢰성의 Roll, Pitch, Yaw 각도를 제공하며, 중력성분이 소거된 항법좌표계에서의 X, Y, Z 가속도 성분의 출력을 지원한다.
온도에 대한 영점 및 감도 보상 알고리즘이 내장되어 넓은 운용 온도 범위에서 안정된 출력을 제공하고, 높은 내열/내구성의 테프론(내선)-실리콘(외선) 재질의 케이블(2M)과 MOLEX 5264-04 커넥터가 적용되었다. 윈도우 환경에서 제공되는 Uni-Matrix 소프트웨어로 설정 및 모니터링이 간편하다.
제품 설명 더보기
|
|
- RTxQ는 짐벌락이 없는 6자유도 관성 측정 장치로서 9축 센서를 내장하고 있습니다.
- 전원 인가 후 80ms 이내에 안정된 데이터를 출력합니다.
- 다양한 출력모드를 제공하며 최대 256Hz까지의 출력을 지원합니다.
- 다중모드 칼만 필터, 오일러/쿼터니언 복합 알고리즘 등 정밀한 알고리즘을 통해 높은 신뢰성의 Roll, Pitch, Yaw 각도를 제공하며 중력성분이 소거된 항법좌표계에서의 X,Y,Z 가속도 성분의 출력 을 지원합니다.
- 온도에 대한 영점 및 감도 보상 알고리즘이 내장되어 넓은 운용 온도 범위에서 안정된 출력을 제공 합니다.
- 높은 내열/내구성의 테프론(내선)-실리콘(외선) 재질의 케이블(2M)과 MOLEX 5264-04 커넥터가 적 용되었습니다.
- 윈도우 환경에서 제공되는 Uni-Matrix 소프트웨어로 설정 및 모니터링이 간편합니다.
|
|
|
- 외형
- 케이스 포함 23x33x8mm의 초소형 사이즈
- 대전방지 ABS 케이스(방진 처리)
- MOLEX 5264-04 커넥터 적용
- 테프론(내선), 실리콘(외선) 내열 케이블(2m) 적용
- 우레탄 코팅 PCB / 실리콘 충진(방진, 방적)
- 측정
- 전원 인가 후 80ms 이내 자세 출력
- 9축 센서 : 자이로/가속도/지자기 각 3축
- 16Bit 해상도 ADC
- 빠른 초기정렬 및 전방위 초기 정렬 기능
- 출력
- 1Hz~256Hz의 선택 가능한 출력 주기
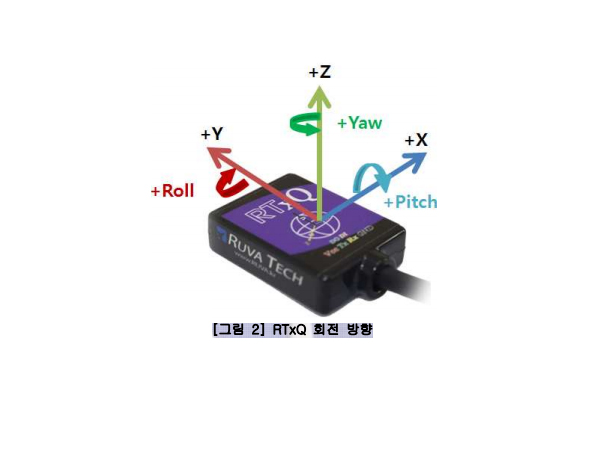
- 전방위 출력 ±180°(Roll/Yaw), ±90°(Pitch)
- RS-232 시리얼 인터페이스
- 9600~460800bps 선택 가능한 Baudrate
- Binary / ASCII 출력
- RTxQ 사용을 위한 전체 예제 코드 제공
- 오일러 / 쿼터니언 복합 알고리즘
- 쿼터니언 출력 지원
- 환경
- 4.0V ~ 9.0V 공급전압 범위
- -40도 ~ +85도의 동작 온도 범위
|
|
|
- 초소형 무인 항공기, 쿼드콥터, 트라이콥터 등의 자세 / 항법 제어
- 무인잠수정, 무인자동차, 무인비행선 등
- 인체 동작 감지, 게임 입력장치
- 각종 로봇 시스템
- Gimbal 시스템
- 기타 전반적인 산업 및 연구개발 분야
|
|
|
|
| 값 |
최소 |
표준 |
최대 |
단위 |
비고 |
| 공급 전압 |
4.0 |
5.0 |
9.0 |
VDC |
|
| 소모 전류(¹) |
21 |
30 |
35 |
mA |
Vsuply= 5.0V |
| 사용 온도 범위(²) |
-40 |
25 |
85 |
℃ |
|
| 축가속도 측정 범위 |
|
±2 |
|
G |
|
| 비선형성(²) |
|
0.2 |
|
%FS |
|
| 최대 측정 각속도(²) |
250 |
500 |
2000 |
°/sec |
설정 변경 지원 |
| 자세 연산 대역폭(5) |
|
256 |
|
Hz |
|
| 출력 안정화 시간 |
30 |
80 |
150 |
ms |
|
| 중 량 |
15 |
17 |
19 |
g |
|
- 공급전압 5.0v에서 시험되었습니다.
- 설계상의 값이며 시험되지 않았습니다.
- 상온(25℃)에서 시험되었습니다.
- 초기(Default) 설정 상태에서의 수치입니다
- PC 환경이나 저사양 시스템에서는 62.5Hz 이상의 출력주기를 사용할 경우 과부하가 발생할 수 있습니다.
|
|
|
|
주의사항
- RTxQ로 공급되는 전원은 가능한 안정된 전원을 사용해 주십시오.
공급 전압은 4.0v ~ 9.0v 의 범위이며, 이 범위를 벗어난 전압을 공급할 경우 RTxQ가 동작하지 않거나 영구적인 손상을 입을 수 있습니다.
- RTxQ로의 강한 충격이나 압력은 가능한 피해 주십시오.
- 자기장 왜곡을 발생시키는 원인(금속, 고전류, 자석, 모터 등)으로부터 최대한 멀리 배치하여 주십시오. 강한 자기장은 지자기 센서의 감도를 영구적으로 감소시키거나 파손시킬 수 있습니다.
- 지하나 콘크리트 건물 내부와 같이 지구자기장이 미약하게 관측되는 장소에서는 정확한 방위(Yaw angle) 측정이 어려울 수 있습니다. Roll/Pitch 축에는 영향이 거의 없습니다. 이 경우 간섭요인을 최대한 제거한 후 calibration을 다시 수행함으로서 약간의 개선이 가능하나, 지구자기장이 매우 약한 경우 정확한 Heading 값을 얻을 수 없습니다.
- Tilt시 Heading(yaw) 값이 발산하는 경우, 주로 바닥 또는 천정(Z축)으로부터의 자기 간섭으로 인한 현상이므로, calibration이나 간섭원인 제거, 위치 이동 등의 방법으로 개선할 수 있습니다.
- RTxQ의 회로는 EMC 최적 설계가 되어 있으나, 주변의 전자기기로 인한 EMI는 지자기 센서의 측정에 직접적인 영향을 미치므로 Heading 정밀도에 악영향을 미칠 수 있습니다.
- RTxQ는 TTL레벨의 UART 출력이 아닌, 12v 레벨의 RS-232 신호를 출력합니다. 따라서 커넥터 변경 및 전원연결 만으로 일반적인 PC의 시리얼 포트에 바로 연결하여 사용할 수 있습니다.
제품의 고정
- 양면 테이프 제품류를 사용한 RTxQ의 고정을 권장합니다.
- RTxQ의 윗면(로고가 붙어있는 면)이 위로 향하도록 고정해 주십시오.
- Y축 화살표(Magenta 색상)가 전방을 향하도록 고정해 주십시오.
- 고정 방향이 올바르지 않을 경우 마운팅 바이어스 발생의 원인이 됩니다.
- 방진 패드 등을 사용하여 RTxQ를 고정하면 진동이 많은 환경에서도 보다 정확한 출력을 얻을 수 있습니다.
- 금속 재질의 구동되는 기구부에서는 전자기 노이즈가 발생됩니다. RTxQ가 이러한 노이즈 원인 으로부터 일정 거리 이상을 확보할 수 있도록 배치하여 주십시오.
- 안테나, RF회로, 고속 클럭을 사용하는 전자회로, 고전압 또는 많은 전류가 흐르는 회로 등으로부터 발생하는 노이즈에 영향을 받지 않도록 충분한 거리를 이격하여 주십시오.
- 자석, 금속, 배터리 등의 자성 물질은 지구 자기장을 왜곡하여 Yaw각도 출력에 영향을 미칠 수 있으므로, 해당 물질이 RTxQ와 충분한 거리를 두도록 배치해 주십시오.
- 보다 정밀한 출력을 위해서, 마운팅 이후 또는 환경에 변화가 발생한 이후에는 초기정렬을 수행하여 주십시오.
|
제품 구입하러 가기
TEL. 031-866-9900
www.ruva.kr


