MoonWalker DC 모터 제어기의 특장점
저희는 최근 단순한 구동 드라이버에서 벗어나 좀 더 많은 기능과 강력한 성능을 담은 제품을 기획하고 있었습니다. 이름하여 MoonWalker 시리즈입니다. 이제 DC 모터 제어기들 부터 출시가 될텐데요. 엄청난 기능들이 많아요^^
이쁘게 나온것 같아요. MoonWalker라는 로고도 괜찮지 않나요? ㅎㅎ.
이번에 소개해 드릴 것은 MoonWalker의 DC 모터 제어기 시리즈로 총 6종이랍니다.
- DC 모터의 전류 / 속도 / 위치 제어기가 탑재된 고급형 제어기
- 제품별로 8V에서 48V까지의 넓은 전압범위와 최대 50A까지의 연속 최대 구동 전류
- Unipolar/Bipolar 구동 방식 선택 가능
- 18kHz에서 40kHz까지의 PWM 주파수 범위
- 각 구동 방식별로 close-loop / open-loop 제어 방식 선택 가능
- 전류 / 속도 / 위치 제어기 각각에 anti – windup 제어기 설계
- 사다리꼴 프로파일을 이용한 속도 제어가능
- Open-loop 구동 시에도 사다리꼴 프로파일 적용 가능
- 고급형 모바일 플랫폼의 주제어기로 바로 사용 가능할 정도로 로봇에 특화된 명령 지원
- 2축 구동형 모바일 로봇의 주행 명령 탑재
- 2축 구동형 모바일 로봇을 Joystick/RC 조종기를 이용하여 직접 구동 지원
- Joystick/RC 조종기를 사용하여도 속도/전류 제어기 설정 가능
- Incremental 엔코더 신호의 피드백을 이용한 정밀한 위치 및 속도 제어
- Absolute 엔코더 신호의 피드백을 이용한 정밀한 위치 및 속도 제어
- Tachometer 신호의 피드백을 통한 속도 제어
- Potentiometer 신호의 피드백을 통한 위치 제어
- RS232/CAN 통신을 이용한 구동
- Joystick과 같은 아날로그 신호를 이용한 구동
- RC 조종기와 같은 디지털 신호를 이용한 구동
- RS232 /아날로그 신호 / 디지털 신호를 이용한 구동 시 명령어 동시 사용 가능
- 단순 PWM 신호를 이용한 open-loop 속도 조절
- Joystick과 RC 조종기 사용시 min/max 범위 설정과 센터 부근의 dead-band 영역 설정
- Joystick과 RC 조종기 사용시 입력 신호에 대한 calibration과 linearity 설정 가능
- Digital in/out port와 analog in port 등을 이용하여 사용자 스크립트(script) 지원
- 제품의 설정과 구동을 편하게 할 수 있는 환경 설정 및 구동용 PC 프로그램 제공
- EEPROM을 이용한 유저 세팅값 저장 및 재부팅 시 자동 불러오기
- CAN 통신에서 멀티 드롭 연결을 위한 Device ID 설정 가능
- 배터리 전압 측정 및 제어기의 과전압 / 저전압 보호 기능
- 모터의 전류 측정 및 과전류 보호 기능
- 통신 연결 중단 시 모터 정지를 위한 watchdog timer 기능
- 내부 FET 방열판의 온도 측정을 통해 과열 보호 기능 탑재
- RGB LED를 사용한 에러, 동작, 통신상태 표시
이렇게 많은 기능을 담았답니다.^^. 오늘은 살짝 맛보기로 테스트한 동영상 하나 보여드릴께요
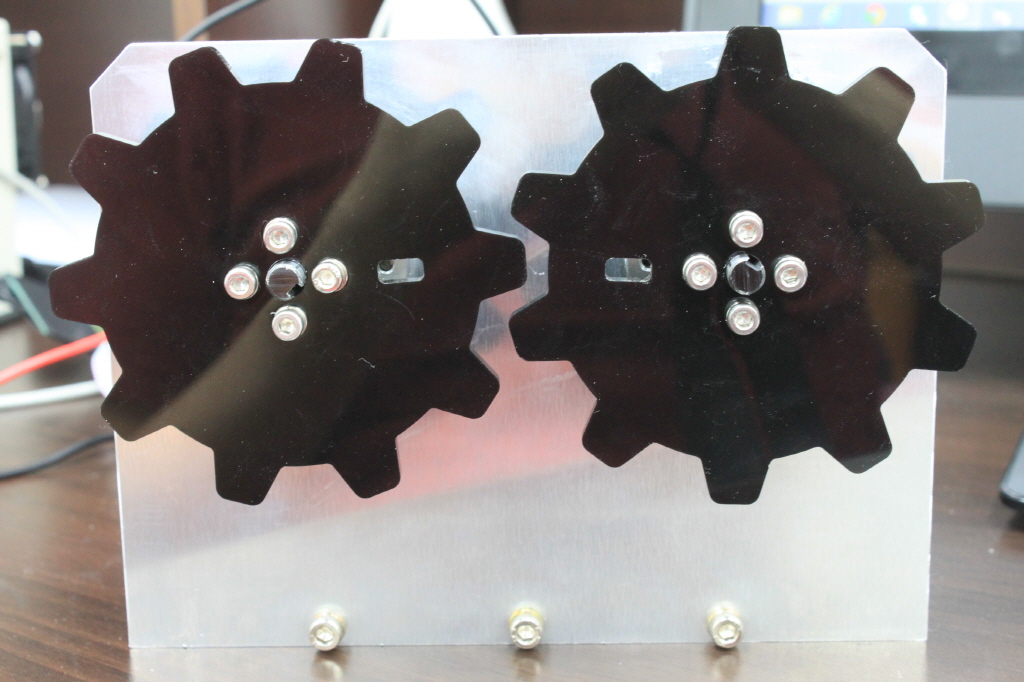
이렇게 만나지 않는 기어를 두 개 연결했습니다.
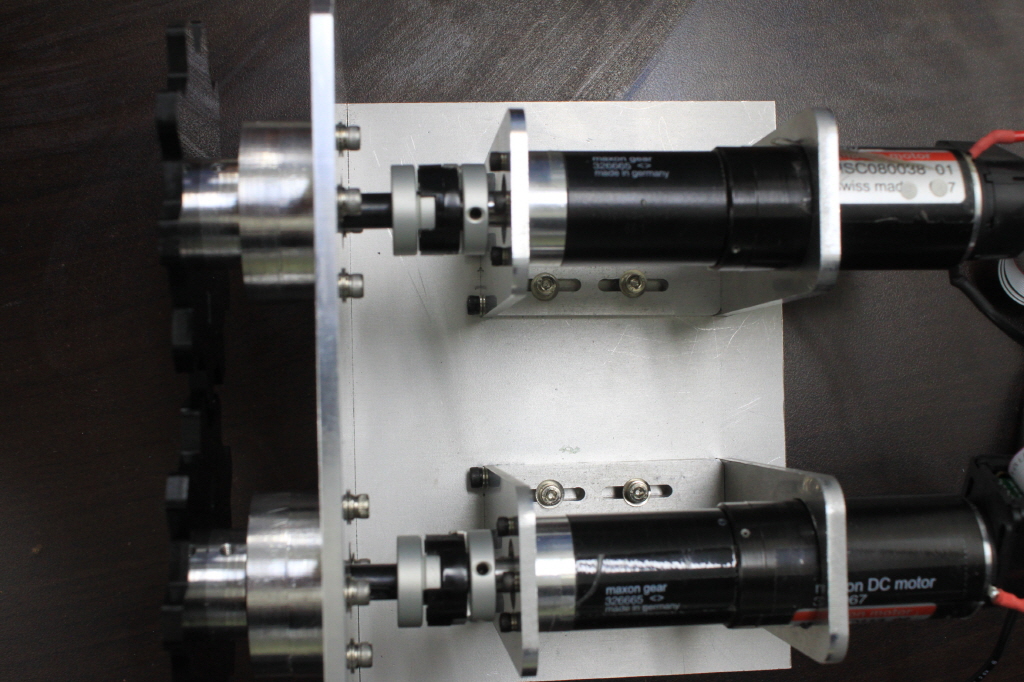
물론 각 기어는 각 각 모터에 연결되어 있구요.
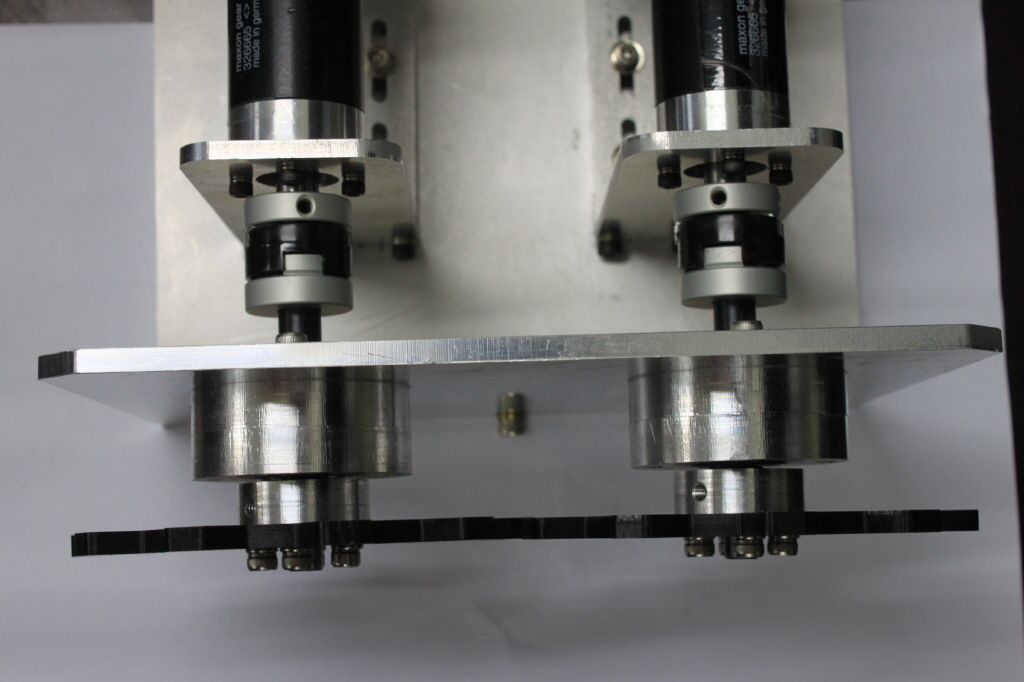
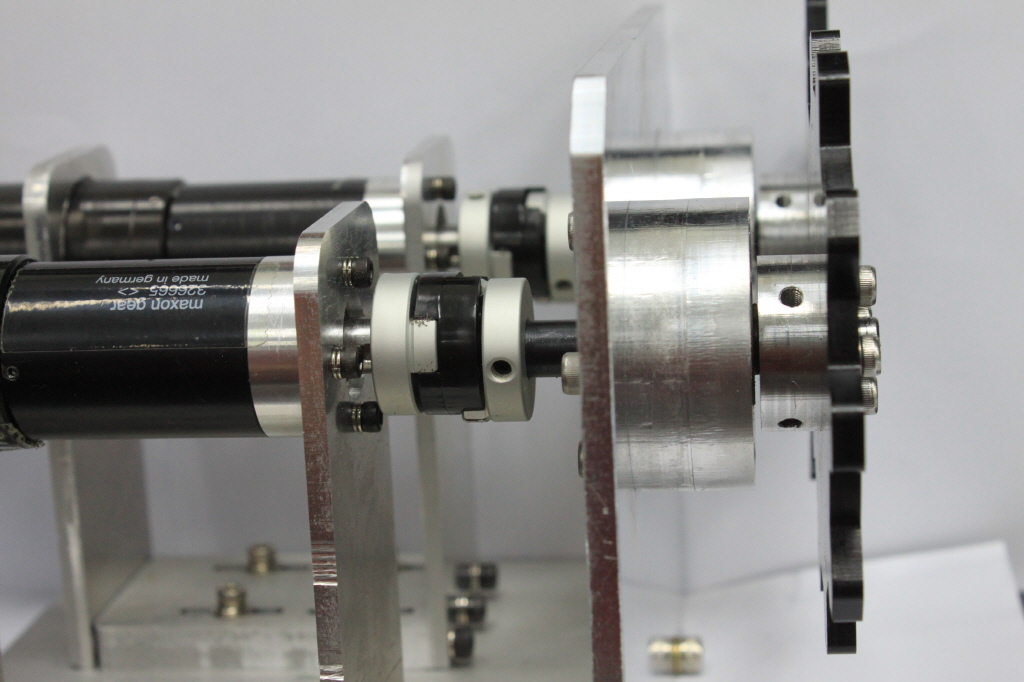
또 이렇게 옆으로는 같은 선상에 두었습니다. 이렇게 해서 두 모터가 모두 동시에 위치제어가 잘 안되면 기어가 서로 부딪히는 거죠. 그걸 서로 닿지 않도록 하면서 두 모터를 모두 운전하는 겁니다. 실제 곧 출시 예정인 MoonWalker 시리즈의 MW-MDC24D200D 모델을 사용했습니다. 이 모델은 2채널 모델로, 하나의 제어기에서 두 모터를 다 가동할 수 있습니다. 동영상에 보이는 PC 프로그램은 PC 쪽에서 모터 드라이버에 가동 명령만 주도록 만들어졌습니다.
조금만 기다려 주세요. 무쟈게 괜찮은 놈이 곧 찾아간답니다.^^. 아 마지막으로 저희 MoonWalker의 메뉴얼용 로고와 제품용 로고도 보여드릴께용^^

이쁘게 잘 나왔습니다. 약간 기존의 모터 제어기들의 로고랑 비교하면 좀 자유롭긴 하지만요^^ 아 그리고 로고 디자인 하느라 수고하신 boram님께도 감사를^^
이제 아주 조금만 기다려 주세요^^


