Joystick을 이용한 AstroBoyS Mecanum platform Ⅱ/Ⅲ 구동
안녕하세요.
오늘은 저희의 주행로봇 제품인 Mecanum PlatformⅡ/Ⅲ에 조이스틱을 연결하여 구동시켜보려합니다.

Mecanum Platform은 기본적으로 RC조종기와 함께 판매되고있는데요.
혹시나 RC조종기가 아닌 내가직접 만든 조이스틱을 사용하여 Mecanum Platform을 구동시키고 싶다!!
하시는 분들을 위해 사용방법을 알려드리려고 합니다 .
물론 , 조이스틱은 기본 구성품이아니기에 부품은 사용자가 알아서 해야 된다는점이 있지만 저희 디바이스마트에서
손십게 구하실수 있으므로 걱정은 쿨하게 생략하도록 하겠습니다.
자, 먼저 Mecanum Platform의 메인 Control Panel을 살펴보도록 하겠습니다.
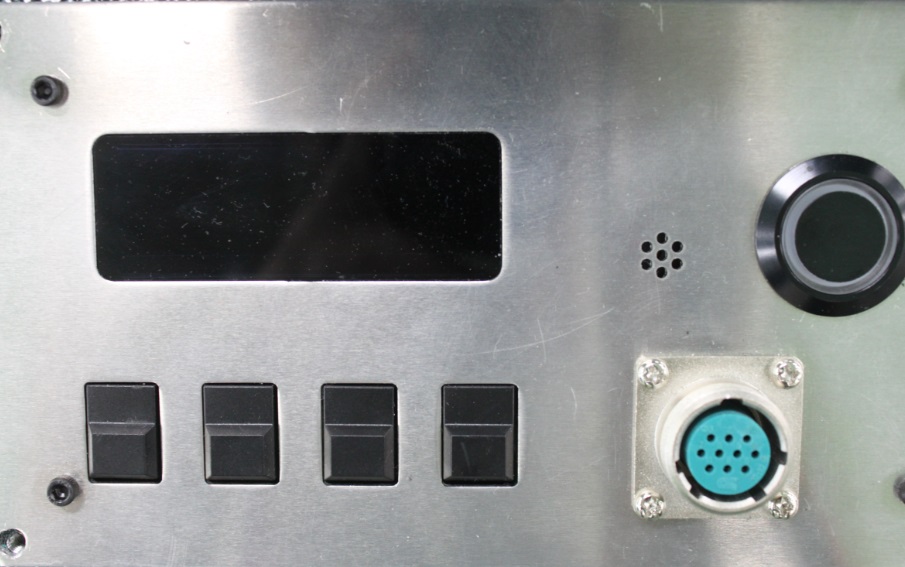
위와같이 생겼는데요. 여기서,

바로 이 단자가 Joystick과 연결해주는 부분인데요.
그렇다면 본격적으로 조이스틱 연결하기에 들어가겠습니다.
먼저 준비물이 몇가지 필요한데요.
첫번째가 조이스틱 입니다. 조이스틱은 사용하기 편한 것으로 골라서 사용하면 되는데요
저같은 경우는 조이스틱 200-M4 라는 제품을 사용하였습니다.

다음은 스위치 입니다. 스위치는 일반 푸시버튼 스위치인 PB86-AO 를 사용하였습니다.

스위치는 다양한 옵션을 위해 사용할 수 있습니다만(최대3개) 저는 Mecanum Platform의
동작mode변경을 위해 하나만 사용하였습니다.
두번째는 좌,우로 이동이 가능한 Mecanum mode 입니다.
다음은 커넥터 단자와 이 조이스틱보드를 연결시켜줄 케이블과 커넥터가 필요합니다.
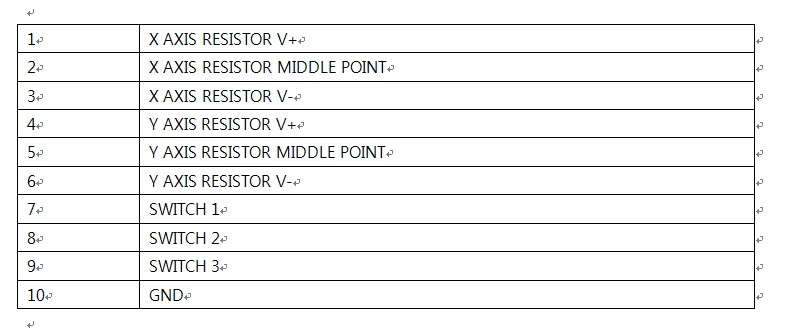
맨위에 사진에서 보시면 아시겠지만 단자에는 총 10개의 구멍이 나와있는데요.. 이 단자를 위한 케이블로
RS232 실드케이블-10C 을 사용하였고, 단자용 커넥터는 SCC-16-10P를 사용하여 연결해 주었습니다.
조이스틱 보드와 케이블을 연결시켜주는 부분은 일반 몰렉스커넥터로 선택했습니다 .
그 다음, 위의 부품들을 아래 사진과 같이 만능기판에 장착하였습니다.
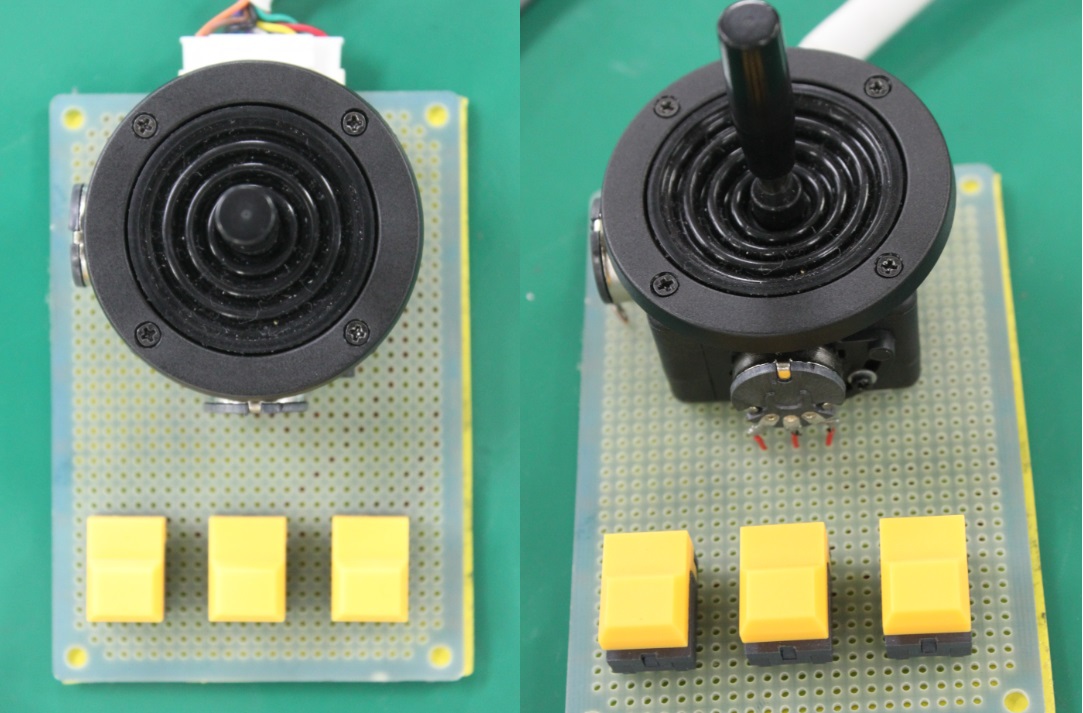
이것이 위에서 찍은 사진입니다.
위 사진에는 스위치가 3개가 연결되어있지만 앞서 말씀드린 것 처럼 스위치는 맨 왼쪽 1개만 사용합니다.
다음은 뒷모습을 찍은 사진입니다.
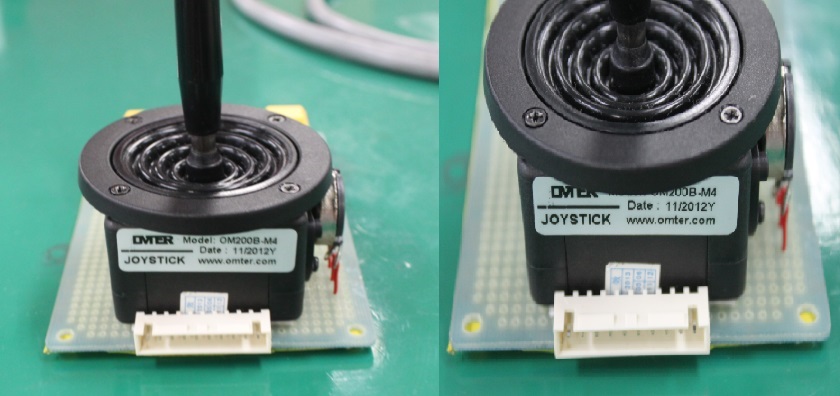
그림과 같이 커넥터를 연결해 주었습니다.
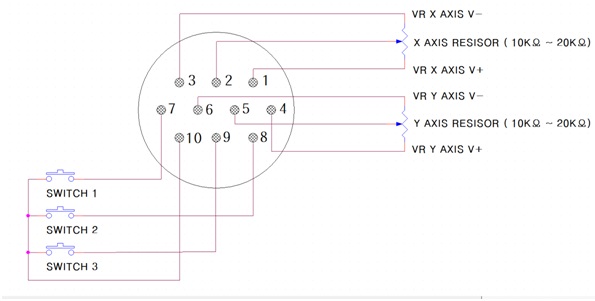
회로도는 다음과 같습니다.
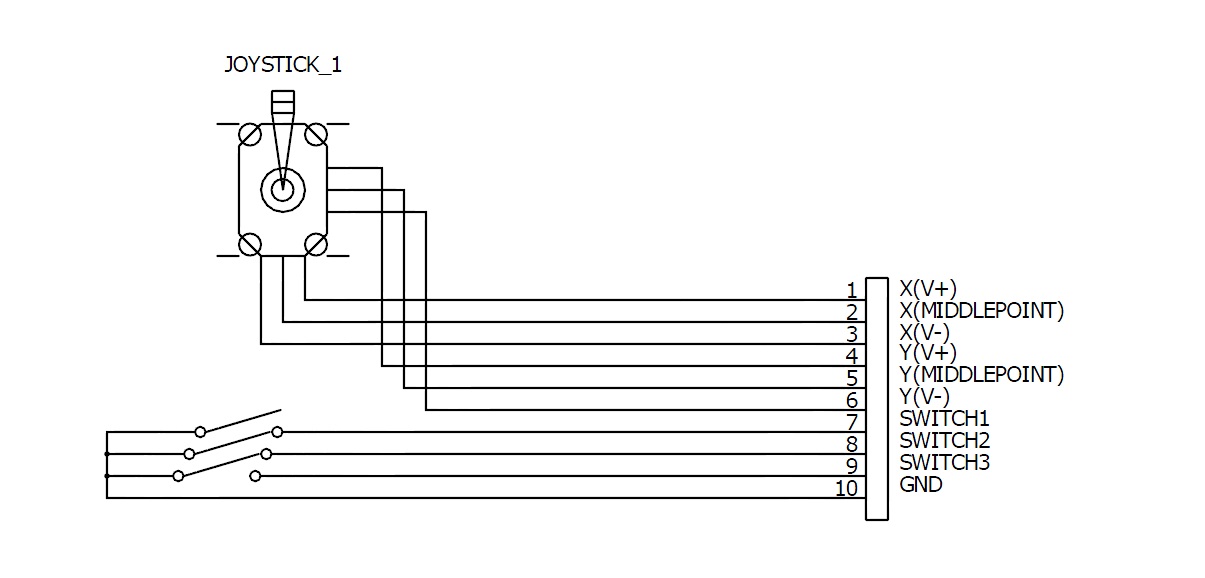
조이스틱과 스위치, 커넥터의 연결은 아래에 나와있는 핀 배치도를 보시고 연결하시면 됩니다.
케이블역시 아래 사진처럼 커넥터와 연결을 해주고
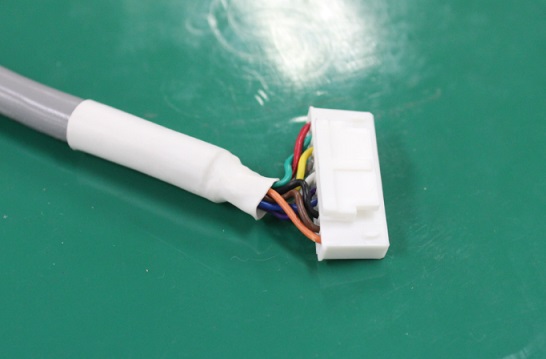
반대편은 Platform의 단자와 연동되는 커넥터(SCC-16-10P)를
사용하여 연결해주면 아래와 같은 최종모습이 완성됩니다.
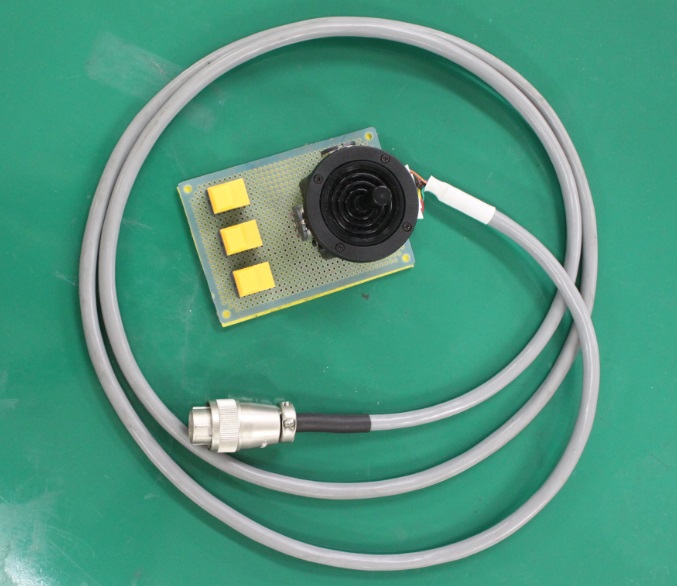
이것이 연결을 완료한 모습입니다.
이제 이 조이스틱을 Mecanum Platform에 연결해 보도록 하겠습니다.

위 사진처럼 홈에 맞추어 연결해주고 전원을 켭니다.
전원을 켜고 MODE 스위치를 길게(2초 이상) 눌러 유선 조이스틱 입력 모드와
RC 조종기 입력 모드를 전환할 수 있습니다.
조이스틱 모드로 설정하면 위 사진의 첫번째 사진과 같은 화면이 나오는데 이는 입력 모드 전환 시 입력된
조이스틱의 X축 Y축 CENTER 값을 체크 하는 것입니다.
CENTER값 체크가 완료되면 두번째 사진과 같이 연결이 완료됐다는 화면이 잠시 나타났다가 사라지고,
아래와 같은 화면이 나타납니다.

처음 연결시 Normal Driving이라는 문구가 나타나는데 Mecanum Mode로 변경하고 싶다면 앞서
조이스틱보드에 만들어둔 스위치를 눌러주면 Mode변경이 됩니다.
연결이 완료되었으니 동작이 되는지 테스트를 해보겠습니다.
테스트모습은 아래 동영상으로 첨부하겠습니다.


