[60호]유니케어(스파인키퍼)


2019 ICT 융합 프로젝트 공모전 참가상
유니케어(스파인키퍼)
글 | 고려대학교 신승우, 김율, 김준, 한유경
1. 심사평
칩센 자세 데이터를 입력받아 사용자에게 잘못된 자세에 대한 교정을 하게 하고, 누적 데이터를 이용하여 사용자에게 맞는 스트레칭 방법 제시 등으로 헬스케어링 솔루션을 할 수 있도록 하게 하는 장치로 보입니다. 제품의 서비스가 운용되기 이전에 어느 정도 안정화되고 일반화된 DB를 구축하고, 사용자에게 적절한 sign을 줄수 있는 기본 데이터 구축이 관건으로 보입니다. 개발 작품의 개념과 소프트웨어 적인 부분은 보고서를 통해 어느정도 이해를 할 수 있으나, 실제 하드웨어나 제품의 정보가 부족하여 평가를 진행하는 데 어려움이 있습니다.
뉴티씨 자세는 삶을 살아가는 가운데 있는 매우 중요한 요소입니다. 이를 통해서, 몸의 형태가 달라지고, 건강에 큰 영향을 끼치게 됩니다. 이를 바로잡을 수 있는 장치를 방석 하나로 제안해줄 수 있다면 누구나 하나 정도 구매하고 싶지 않을까 싶습니다. 향후 좋은 제품이 되기를 바랍니다.
위드로봇 제품의 기획은 뛰어나나 작품의 완성도가 부족한 부분이 많습니다. 좀 더 추가 연구가 필요합니다.
펌테크 아이디어와 실용성을 갖춘 작품이라고 생각이 듭니다. 단 제출된 보고서 내용을 고려하자면 작품에 대한 기획의도는 우수하다고 생각되지만 계획에 대비해서 출품작의 진행과정이나 완성도를 확인할 수가 없었습니다
2. 개요
2.1. 아이템 소개
· 올바른 자세를 유도하는 H/W와 맞춤형 스트레칭 콘텐츠를 제공하는 S/W로 구성된 스마트 헬스케어 IoT 서비스입니다.
· H/W에서 얻은 표준데이터를 기점으로 압력에 따라 사용자의 자세를 측정하고 분석하며 이에 대한 데이터를 클라우드 서버로 수신합니다.
· S/W를 통하여 사용자는 자세에 대한 정보를 얻고 서비스 제공자는 전체 사용자 데이터를 활용하여 스트레칭 정보 제공 알고리즘에 활용합니다.
· 성별, 연령, 직업특성 등 기본 정보에 따라 맞춤형 스트레칭 정보를 제공합니다.
· Openpose 모델을 이용하여 사용자의 스트레칭 모션에 대한 실시간 음성 피드백을 제공합니다.
2.2. 아이템의 차별성
· H/W를 통하여 자세 측정 및 분석에 그치는 것이 아니라 애플리케이션을 통하여 개개인의 데이터에 따라 맞춤형 근력 강화 운동 및 스트레칭 콘텐츠 제공합니다.
· 실생활에 편리한 방석형 하드웨어로 방석에 센서가 분포되어 있어 착용형 디바이스보다 오차 범위가 작고, 정확하고 세밀한 자세 측정이 가능합니다.
2.3. 국내외 목표시장
· 앉아있는 시간이 많은 28~39세의 직장인을 주요 타겟으로, 14~27세의 학생 및 장시간 앉아있고 척추 건강에 관심이 많은 세그먼트를 서브 타겟으로 설정하여 국·내외 스마트 헬스케어 시장 접근합니다.
· 국·내외 클라우드 펀딩을 기반으로 국내 온라인 판매, B2B영업 및 복지몰 입점, Amazon.com 입점 등으로 성공적인 판매 유통 라인 구축합니다.
3. 개발목표
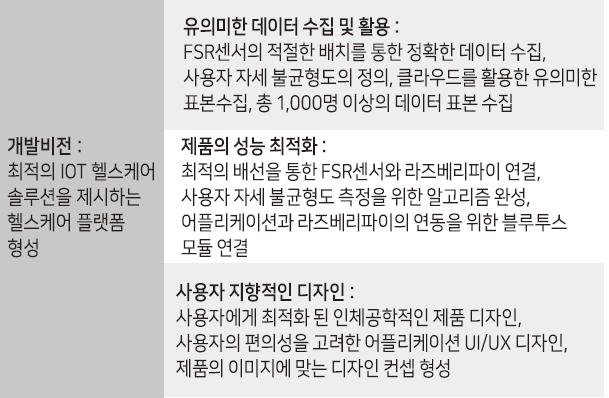
저희의 개발목표는 허리통증으로 불편함을 겪는 사람들이 간편하게 올바른 자세를 유지 할 수 있도록 IoT 헬스케어 솔루션을 제공하는 헬스케어 플랫폼을 준비하는 것입니다. 이를 위해 데이터, 성능, 디자인에서의 목표를 설정하였습니다. 이러한 목표를 달성하기 위해 저희는 저희의 개발의 비전의 개념도를 그려보았습니다.
3.1. 아이템 개발동기 및 목적(필요성)
3.1.1. 아이템 개발 동기
◦ 기하급수적으로 증가하는 척추질환 환자
· 장시간 움직이지 않은 상태로 앉아 있는 자세가 허리 긴장은 물론 노화를 가속화하고 척추에 무리를 더하기 때문에 허리통증이 발생합니다.
· 2013년 775만 148명에서 2017년 863만 9712명으로 5년 간 척추 환자 88만 9564명 증가 (건강보험심사평가원 의료통계정보)
· 2017년도 일반척추수술은 33개 주요 수술 분야 중 수술 비용 6천74억원으로 1위, 다빈도 수술 17만2천429건으로 3위 차지 (국민건강보험공단)
◦ 잘못된 자세와 생활 습관이 척추 질환에 끼치는 영향
· 구부정한 자세는 바른자세에 비해 1.5~3배 가량의 압력이 척추에 가해지며, 하루 평균 앉아서 지내는 시간은 7시간 30분인 것을 감안하면 구부정한 자세로 장시간 노출 될 경우 척추와 주변 신경에 긴장감을 주어 척추질환으로 이어질 수 있습니다.
· 필라테스, 요가, PT 등은 비용적, 시간적, 공간적 제약이 따름으로 올바른 자세와 생활 습관을 개선하고 교정하기 위해선 지속적인 노력과 개개인에 맞춘 명확한 헬스케어 솔루션 필요합니다.
3.1.2. 아이템 목적(필요성)
◦ 데이터 기반 자세 측정 및 분석
· 내장된 압력 센서로부터 사용자들의 자세를 분석하고 사용자에 맞는 최적의 자세와 근력강화 운동 및 스트레칭 컨텐츠를 제공함으로서 척추질환을 예방하고 스마트 디지털 라이프 스타일 도약
◦ 기존 자세분석 IoT의자 경쟁사의 한계점
· ‘듀오백온’의 장점은 높은 퀄리티의 CMF 디자인과 인체공학적인 설계로 편한 착용감을 제공하지만 애플리케이션(S/W)의 부제와 사용자의 자세 데이터를 축적하는 Tracking Mode 기능만 제공하기 때문에 자세를 교정하는데 취약합니다.
· SeatLogger(싯로거)는 PCB 설계가 잘 되어있어 정확한 측정이 가능하지만 진동 알림을 주는 Training Mode가 과다하여 사용자에게 편안함을 주지 못하는 한계점이 있습니다.
◦ 단점을 보완하고 장점은 극대화
· 사용자에게 편안한 착석감은 물론 정확한 측정이 가능하고 User Friendly한 S/W 인터페이스를 제공함으로서 사용자 본인이 언제든지 자신의 자세파악 및 Training과 Tracking 모드를 선택 가능하게 하고 알림 주기 설정 등의 옵션을 제공을 통해 사용자를 고려한 서비스를 제공합니다.
· 기존 자세분석 IoT기구들은 사용자의 자세 분석에 그치는 반면 자사 제품은 사용자들의 자세 분석 및 자세 분석을 토대로 개개인에게 맞는 스트레칭 콘텐츠 제공 및 피드백을 줌으로써 지속적인 케어 서비스를 제공한다는 점에서 가장 큰 차별점을 가집니다.
3.2. 아이템 기술성 및 우수성
◦ 제품·서비스 운영 시나리오
자세 불균형도 계산 : FRS 센서와 로드 셀센서를 활용하여 방석에서 사용자 자세의 불균형도 계산
자세 불균형 알림 : 자시 불균형시 알림과 1시간에 한번씨 휴식 및 스트레칭 신호 전송
스트레칭 정보 제공 : 사용자의 앉아 있는 자세를 추정하여 사용자의 다른 신체정보와 결합(사용자에게 맞는 최적의 스트레칭 방법을 제공)
사용자의 자세 확인 : 애플리케이션을 통해 사용자는 자세습관, 실리는 무게, 앉아있는 시간, 몸을 움직이는 빈도 등의 자세에 대한 다양한 정보 확인 가능
사용자 간의 자세정보 공유 : 클라우드를 통해 사용자의 자세, 스트레칭 정보 등을 공유, 전문가와 사용자의 정보 공유를 통해 전문적인 헬스케어 솔루션 제
◦ 제품·서비스 핵심 요소
라즈베리파이 : FSR센서 등의각종 부속품과 프로그램을 연결해주는 플랫폼 역할을 수행
FRS센서 : 방석에 가해지는 압력 측정에 따른 사용자의 자세 데이터 측정
애플리케이션 : 입력 받은 자세 데이터를 활용하여 사용자에게 바른 자세와 스트레칭 방법을 제시
클라우드 : 각 사용자의 제품에서 FSR센서를 통해 데이터와 이에 제공되는 솔루션 데이터 공유
◦ H/W 개발
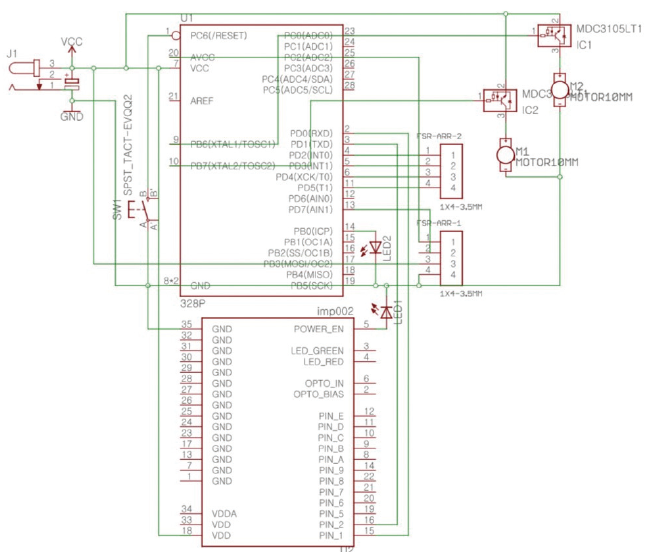
PCB기판
· 사용자 자세 데이터를 압력 센스가 내장된 하드웨어로 얻어 Cloud Server로 수신 후 표준데이터 기점으로 자세를 측정하고 분석합니다.
· 센서 : FSR센서, 진동센서, 로드셀, 가속도센서로 구성되어 사용자의 움직임을 감지하고 프로세서의 제어에 따라 입·출력합니다.
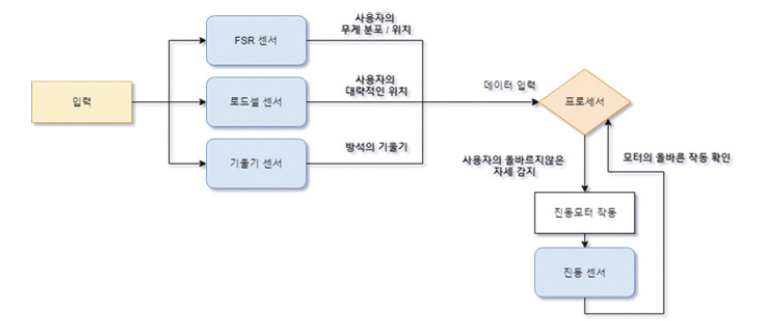
센서 개요도
· 프로세서 : BCM2835, ATmega328로 구성, 센서들을 제어하고 통신 데이터를 송·수신합니다.
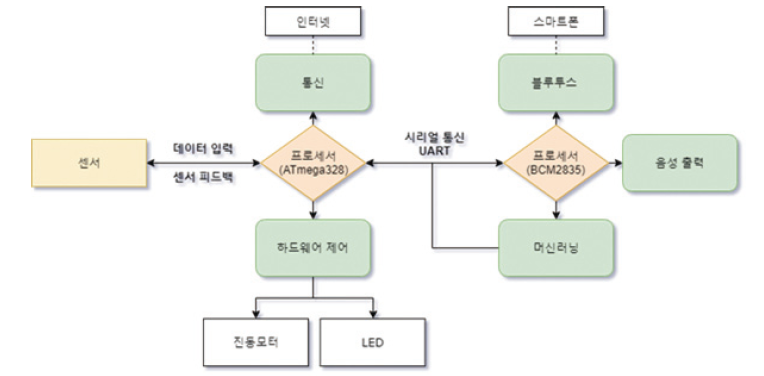
프로세서 개요도
· 통신 : ESP8266, IMP005로 구성되어 프로세서에서 가공한 데이터를 WI-FI 또는 블루투스의 형태로 수·발신합니다.
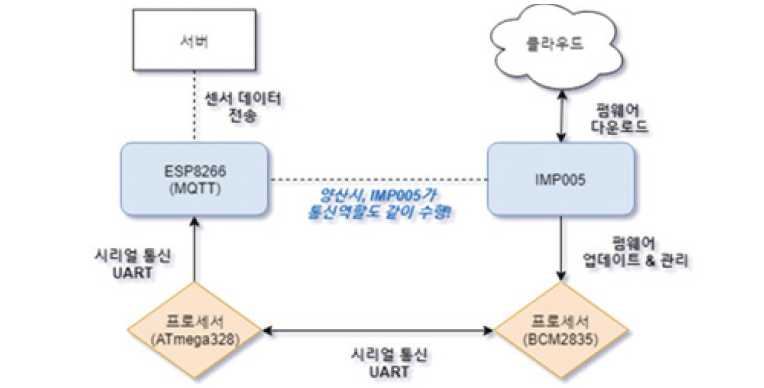
통신 개요도
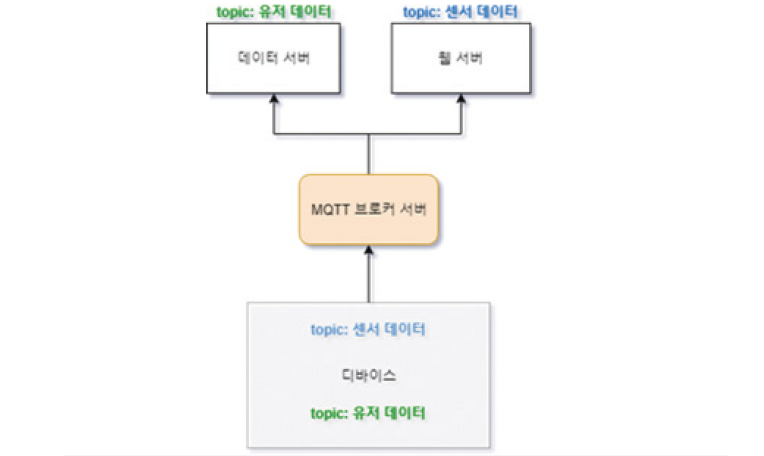
MQTT 개요도
◦ S/W 개발
· 애플리케이션을 통해 사용자는 자신의 자세 정보를 얻고 서비스 제공자는 전체 사용자 데이터를 활용하여 스트레칭 정보 제공의 알고리즘에 활용합니다.
· 디바이스 (사용자기기) : 사용자에게서 수집된 데이터를 정리하고 사용자와 물리적으로 소통합니다.
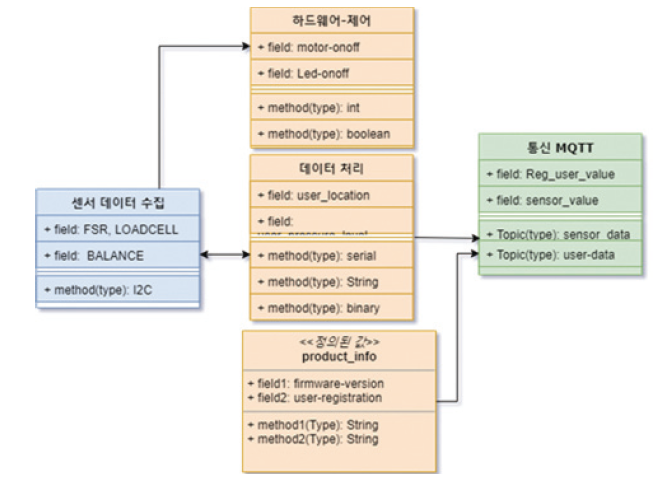
디바이스 개요도
· 서버(클라우드) : 인터넷 통신을 통해 디바이스에서 받은 데이터를 출력하고, 그에 대한 아웃풋을 보냅니다.

서버 개요도
· S/W는 앉아있는 자세, 앉아있는 시간, 둔부에 실리는 무게, 몸을 움직이는 빈도 등의 데이터를 수집하고, 서버를 통한 실시간 동기화, 알고리즘에 따른 자세 추정, 사용자 데이터 다운로드, 자체 알고리즘 업데이트 등을 운영합니다.
◦ 콘텐츠 서비스
사용자의 동의로 얻은 기본 정보인 성별, 연령, 직업, 특성 등은 하드웨어로 수집된 자세 정보에 따라 맞춤형 스트레칭 가이드를 제공합니다.
· 자체 제작한 전문가 스트레칭 학습 영상을 제공합니다.
· Openpose Model을 이용하여 사용자의 스트레칭 모션에 대한 음성 피드백을 제공합니다.
3.3. 아이템 시장분석 및 경쟁력 확보방안
◦ 실생활에서 편리하게 사용할 수 있는 방석형 하드웨어입니다,
· 별도로 착용하는 형태가 아닌 일상생활에서 사용하는 방석에 스마트 하드웨어를 결합합니다.
◦ 방석형 하드웨어를 통하여 보다 정확한 자세 측정이 가능합니다.
· 방석에 센서가 분포되어 있어 착용형 디바이스보다 오차 범위가 작고, 보다 정확하고 세밀한 자세 측정이 가능합니다.
◦ 하드웨어와 소프트웨어의 융합으로 바른 자세를 돕는 스마트 헬스케어 서비스를 제공합니다.
· 하드웨어와 소프트웨어의 융합을 통하여 구부정한 자세에서 알람을 제공하는 1차원적인 형태에서 발전하여, 사용자의 자세를 분석하고, 맞춤형 스트레칭 가이드 제공을 통하여 스마트 헬스케어 서비스를 구축합니다.
◦ 합리적인 가격으로 정확하고 체계적인 솔루션을 제공합니다.
· 권장 소비자가 99,000원(예정)과 스트레칭 애플리케이션 기본 콘텐츠 무료 제공을 통하여 합리적인 가격으로 소비자 솔루션을 제공합니다.
· 스마트 의자를 제공하는 시디즈는 20만원 후반대, 듀오백은 20만원~30만원 후반대로 방석과 기존 의자 제품이 결합 된 일체형이며, 제공 소프트웨어가 있을 경우 자세 분석에 그칩니다.
3.4. 시뮬레이션



3.5. 시장진입 전략
◦ 내수시장 타겟
· 주요 타겟 : 28~39세의 직장인
· 서브 타겟 : 14~27세의 학생 및 장시간 앉아서 생활을 하며 척추 건강에 관심이 많은 사람
◦ 합리적 가격 : 권장소비자가 99,000원 설정
◦ 성공적인 클라우드 펀딩을 통하여 내수시장 진입
◦ B2C 시장 : 온라인 판매 라인 확충 및 온라인 마케팅 활성화
· 네이버 스토어팜을 기반으로 온라인 판매 시스템 구축
· 주요 타겟을 대상으로 구매푸쉬형 온라인 광고 진행
· 온라인 판매 라인 구축 후 백화점, 박람회 등의 오프라인 판매 순차적 진입
◦ B2B 시장 : 병원, 콜센터, 운전 관련 업종 대상
· 장시간 앉아서 근무하는 환경 업종을 대상으로 B2B 영업 진행
· 헬스케어 및 B2B 관련 박람회 적극적 참여
· 국내 기업의 복지몰 입점
◦ 영미권 시장 현황
· 미국의 헬스케어 지출은 2017년 약 1만633달러로, 향후 2021년까지 연간 3% 증가해 1만1982달러에 달할 것으로 예측 (Statista, Kotra)
· 2016년 기준 피트니스 애플리케이션의 매출은 약 4억3300만 달러, 피트니스 웨어러블 기기의 매출은 약 7억5900만 달러로 집계 (Statista, Kotra)
· 생활보조 디바이스는 2016년 기준 3억6600만 달러의 매출을 창출했으며, 앞으로 빠른 속도로 성장해 2021년 23억 달러의 규모로 성장하게 될 것으로 전망 (Statista, Kotra)
◦ 영미권 클라우드 펀딩을 통하여 해외시장 홍보 및 진입
· 영미권 클라우드 펀딩 ‘킥스타터’ 프로젝트 진행
· 펀딩 프로젝트 전후 홍보 블로그 글 배포, 오피니어 및 블로거 체험 시제품 배송
◦ 영미권 시장 온라인 유통 시장 확보
· 아마존(Amazon) 입점 및 영미권 국가 대상 온라인 광고 진행
[60호]시각장애인 안전 지킴이


2019 ICT 융합 프로젝트 공모전 참가상
시각장애인 안전 지킴이
글 | 광운대학교 백현은, 김주원
1.심사평
칩센 시각 장애인과 같은 사회적 약자들에게 도움이 될 수 있는 많은 방안이 준비되고 있습니다. “시각 장애인 안전 지킴이” 또한 그러한 의도로 기획이 되었으리라는 것을 충분히 알 수 있습니다만, 몇 가지 고려되지 않은 부분들이 보여 아쉬움이 있습니다. Device2의 경우 사용자가 소유하고 다녀야 하는데, 그것을 고려하면 최소화 및 경량화가 필요할 것으로 보입니다. 이를 위해 다양한 방안이 있겠으나, 이어폰 적용 등을 고려했으면 어떠했을까 하는 아쉬움이 듭니다. 그리고 제작 과정상에 나타난 문제점으로 여러 peripheral을 연동하여 동작하는데 조금은 불안한 형태가 보입니다. 기능별 모듈 등을 적용하는데 조금 더 신중하게 검토가 필요할 것으로 보입니다. 조금 더 안정된 제품을 위한 연구가 추가로 진행되면 좋을 듯 합니다.
뉴티씨 해당 기능을 실제로 구현하는 것은 핸드폰에 기능을 넣어도 좋지 않을까 생각해 보았습니다. 핸드폰용 어플로 제작을 해서, 해당 기능의 일부분을 구현해 준다면 시각장애인들에게 도움이 되지 않을까 하고, 실제로 많이 쓰이는 필수 어플로 등극하기를 기대해 봅니다.
위드로봇 GPS 정밀도에 대한 대책이 추가되면 더욱 좋은 작품이 될 것 같습니다.
펌테크 작품의 아이디어가 돋보이며 추후 작품을 발전시키면 실제 시각장애인에게서 활용이 가능한 제품이 될 수 있으리라 생각이 듭니다. 단 사용자가 사용할 디바이스의 경우 아두이노로 구성된 디바이스가 아닌 편의성과 휴대성을 갖춘 스마트폰으로 구성이 되어야 좀더 완성도 높은 작품이 되지 않을까 생각이 듭니다. 제출된 문서 내용을 고려하자면 계획 대비 최종 완성이 되지는 않은 것으로 판단됩니다.
2. 작품 개요
위험한 도로를 이용하는 시각장애인을 보고 있으면 사고가 나지는 않을까 하는 불편한 마음이 들었고 시각장애인이 길을 건널 때에는 도움을 주지 않을 수 없었습니다. 또, 시각장애인들을 위한 점자 블록들은 보도 공사 후 다시 제자리를 찾지 못하여 제 기능을 못 하거나, 심지어는 도시 미관을 해친다는 이유로 없애기도 합니다. 그래서 시각장애인들이 잘못된 점자로 인한 위험에 처할 일이 없는, 점자블록이 없는 보도에서 정확한 방향을 찾아갈 수 있도록 도와주는 휴대 가능한 디바이스(이하 디바이스1)를 설계하고자 했습니다.
시각장애인들을 안전한 방향으로 안내해 줄 휴대용 디바이스를 설계할 것에 더하여, 횡단보도가 있음에도 알지 못하여 돌아가는 일이 없도록, 또, 시각장애인용 음성안내 버튼을 찾아 헤매며 위험한 상황에 처하는 일이 없도록 하기 위해, 시각장애인이 건널목 근방에 오면 자동으로 음성 안내가 시작되고 멀어지면 음성 출력을 하지 않는 장치(이하 디바이스2)를 설계하고자 했습니다.
두 가지 장치(디바이스1과 디바이스2)가 서로 통신하며 시각장애인들의 안전한 보행을 보장해줄 수 있는 작품을 설계하는 것을 목표로 프로젝트를 진행 하였습니다.
3. 작품 설명
3.1 주요 동작 및 특징
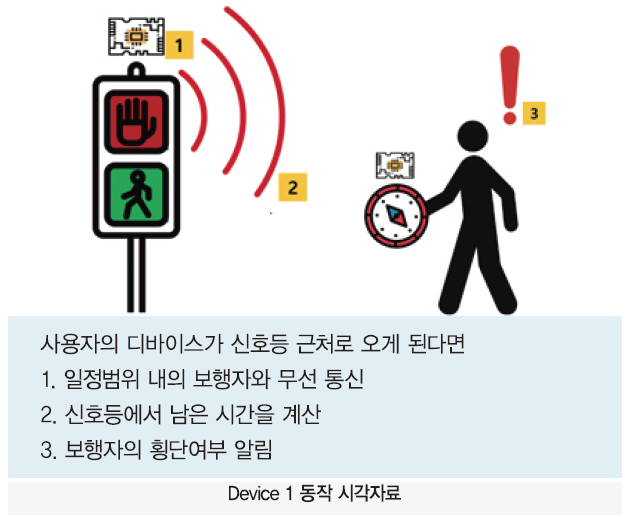
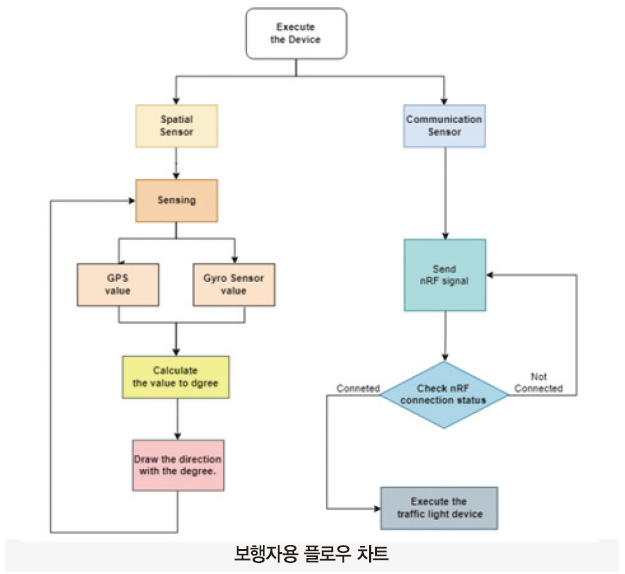
3.1.1. Device 1 동작
보행자 디바이스는 크게 두 가지 가능을 수행합니다. 첫번째 기능은 위성통신과 지자기센서로 읽은 값을 이용하여 디바이스의 화살표가 보도를 가리키도록 합니다. 그리고, 보행자의 위치가 건널목 주변인 경우(GPS로 알 수 있음.) 건널목이 있음을 알리기 위해 모터를 좌 우로 회전시키는 방식으로 진동을 만들어 보행자에게 건널목임을 알려줍니다. 두번째 기능은 신호등에 부착된 Device2와 무선 통신하여 보행자가 신호등이 주변에 도달할 경우 신호등 디바이스에 주변에 있음을 알립니다.
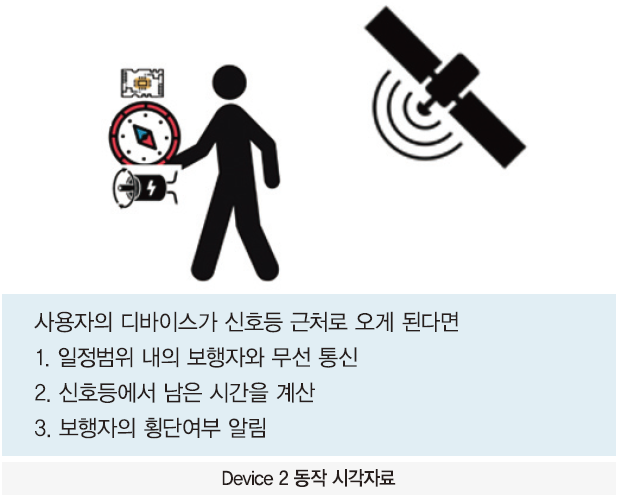
3.1.2. Device 2 동작
보행자 디바이스가 신호등 디바이스의 일정거리 이내로 들어오면 nRF를 이용한 무선통신을 하게 됩니다. 신호등과 동기화된 신호등 디바이스는 두 디바이스가 연결된 순간 신호등의 상태를 음성신호로 나타내 줍니다. 초록신호인 경우 남은 시간을 계산해 보행자가 건너기에 충분치 못한 시간이 남았을 경우 다음 신호를 기다리라는 안내를 내보낸 후 다음 초록불 신호를 알려줍니다. 건너기에 충분한 시간이 남았을 경우 기존 신호등 알리미가 내는 소리를 스피커로 출력해줍니다.
위 Device1의 두 가지 기능과 Device2의 동작으로 시각장애인이 점자가 없거나 잘못된 보도에서도 안전하게 보행할 수 있도록 도움을 줄 수 있습니다.
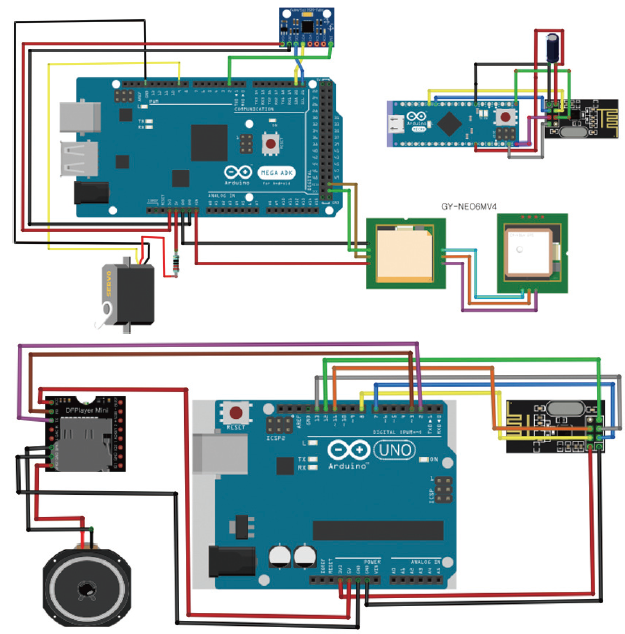
3.1.3. Device 1. 보행자 휴대용 (processor: 1. Arduino Mega & 2. Promicro)
1. GPS Module: 위치 정보 파악. -> 보도별로 나아가 나아가는 방향을 분류
2. Gyro Sensor: 방향 정보 파악. -> 회전량 계산
3. Servo Motor: 방향 정보 제시. -> GPS에서 분류된 Case와 회전량을 계산하여 도로가 나아가는 방향으로 화살표가 가리키도록 모터 제어.
4. RF Sensor: 무선통신. -> Device 2로 송신
사용 모듈 : Arduino Mega, Arduino Micro, GPS, MPU6050, nRF24l01, NEO 06M
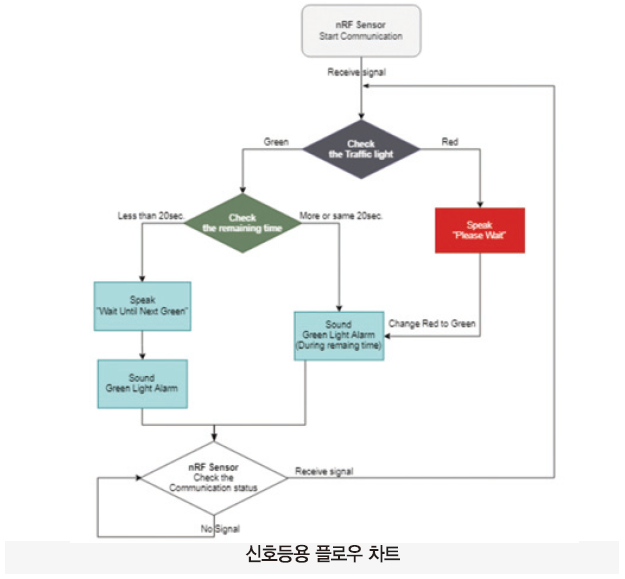
3.1.4. Device 2. 신호등 부착용 (processor: 1. Arduino Uno)
1. NRF Sensor: 무선통신 -> Device 1으로부터 수신 (통신거리에 Device 1 이 들어 올시)
2. DFPlayer mini: mp3 파일 저장 -> 시간정보를 주는 millis() 함수를 이용하여 시간에 맞는 소리 출력 (빨간불, 파란불)
3. Speaker: 소리 신호 알림 -> SDPlayer mini의 data를 소리로 출력
사용 모듈 : Arduino UNO, DFPlayer mini, nRF24l01
4. 개발 환경
4.1.1. Device 2 중요 코드 설명
void loop() {
printFloat1(gps.location.lat(), gps.location.isValid(), 11, 10);
printFloat(gps.location.lng(), gps.location.isValid(), 12, 10);
c=a+b;
Serial.println(c);
motorControl = c;
if (millis() > 5000 && gps.charsProcessed() < 10){
Serial.println(F(“No GPS data received: check wiring”));
}
if (mpuInterrupt ) {
GetDMP();
}
if ( motorControl == 101 || motorControl == 304 || motorControl == 405 || motorControl == 709 || motorControl == 109 ) { // GPS case0 == 90
if(-180<Yaw&&Yaw<-90) { // Target Angle : -90 – Yaw
targetAngle = -90 – Yaw;
}
else if(-90<=Yaw&&Yaw<90) { // Target Angle : 90 – Yaw
targetAngle = 90 – Yaw;
}
else if(90<=Yaw&&Yaw<180) { //Target Angle : 270 – Yaw
targetAngle = 270 – Yaw;
}
if(targetAngle>angle) {
angle++;
}
else if (targetAngle < angle) {
angle–;
}
servo.write(180-angle);
}
else if( motorControl == 813 || motorControl == 713 ) {
GPS의 위도와 경도를 “TinyGPS++.h”에 있는 gps.location.lat()와 gps.location.lng() 함수를 이용하여 받아옵니다. 그리고 받아온 값을 이용하여 ‘미리 나누어 놓은 일정 범위의 GPS값’(학교주변)에 대입하고 값으로 받고 (경도 * 100 + 위도) 값을 변수 c에 저장합니다. 그 후 “MPU6050_6Axis_MotionApps20.h”를 이용하여 만든 GetDMP()를 사용하여 디바이스의 Yaw(초기로부터의 회전)값을 설정합니다. 마지막으로 GPS정보인 c값과 자이로정보인 yaw값을 이용하여 Servo를 컨트롤합니다.
void loop(){
mp3.setVolume(5);
if(Serial.write(9))
{ callTime=millis();
exeTime=callTime/1000;
callee=exeTime%78;
if( (0<=callee) && callee<=53)
{ Red=53-callee;
r=Red*1000;
Serial.println(“RED”);
mp3.playMp3FolderTrack(1); // sd:/mp3/0001.mp3
waitMilliseconds(r);
Serial.println(“NOW YOU CAN GO(CHANGE TO GREEN)”);
mp3.playMp3FolderTrack(2);
waitMilliseconds(25000);
}
if( (54 <= callee) && (callee <78 ))
{
Green=78-callee;
g=Green*1000;
if(Green<15)
{
Serial.println(“WAIT UNTIL NEXT SIGNAL”);
delay(g);
}
else{
g=Green*1000;
Serial.println(“GREEN”);
mp3.playMp3FolderTrack(2);//sd:mp3.0002.mp3
waitMilliseconds(g);}
}
}
신호등 디바이스는 신호등의 빨간불의 시작시간부터 동기가 맞춰져 있습니다. 케이스로 잡은 신호등은 빨간불이 53초 초록불이 25초로 설정되어 있습니다. 신호등은 78초의 주기를 가지고 있습니다.
nRF통신이 연결되면 프로그램카운터의 시간(millis())을 읽어와 신호등의 상태를 계산합니다. Milliseconds를 초단위로 바꾸기 위해 1000으로 나눠 줍니다. 초로 계산된 시간은 신호등의 상태를 알기 위해 신호등의 주기인 78로 나누어 계산된 callee변수를 이용해 신호등의 상태를 아래 코드와 같이 출력해줍니다.
초록색인 신호등이 건너기에 충분치 못한 시간이 남은 경우(15초 미만) 저장된 음성파일을 출력해줍니다.
5. 단계별 제작 과정
5.1.1. 1주차 : 설계 시작
nRF 모듈 및 아두이노 구매 후, 무선통신으로 데이터 주고받는 코드를 작성합니다.
무선통신이 이루어지지 않아 nRF24l01 모듈과 아두이노를 바꾸어 가며 해보았고 결국 와이어 문제임을 발견하여 문제를 해결합니다.

5.1.2. 2주차 : GPS 모듈
GPS모듈 NEO6M으로 위성에서 보내는 GPS 정보를 받아 실생활에서 사용하는 Google Earth에서 지도 확인결과 위성에서 보내는 값을 변환해야 함을 인지하였고, www.gonmand.co.uk 에서 값 변환 후 정확한 위치가 찍힘을 확인했습니다.
5.1.3. 3주차 : 엡을 이용한 GPS 위치 정보 파악
더 정확한 위치 파악을 위해 안드로이드 App을 계발하여 GPS정보를 블루투스로 송신합니다.
5.1.4. 4주차 : 아두이노를 이용하여 GPS 정보 파악
시각 장애인들이 핸드폰을 사용하기에 무리가 있을 수 있으므로 핸드폰을 이용하지 않기로 하였고, Navigation처럼 이용 할 계획으로 GPS모듈 NEO 6M을 이용하여 광운대 주변을 Case분류하여 나눔니다.
5.1.5. 5주차 : 자이로 센서를 이용하여 회전량 측정
이용자가 향하는 방향을 알 수 있어야 하므로 디바이스의 회전 정보를 측정하기 위해 지자기센서 이용합니다.
지자기센서가 축의 기울기 DATA를 측정하는 것을 확인하고 오일러 변환을 통하여 회전 값으로 변환.(소프트웨어적 해결)합니다.
5.1.6. 6주차 : 자이로 모터 연동
지자기센서를 이용하여 측정된 디바이스의 회전 값만큼 모터가 반대로 회전하여 화살표가 한 방향만 가르치도록 설계 후 GPS로 분류한 Case별로 화살표가 가리킬 방향을 설정합니다.
5.1.7. 7주차 : 음성출력 코드 작성
두 nRF24l01 모듈의 통신을 이용하여 RTT(round trip time)값을 계산하여 두 디바이스간의 거리를 파악 한 후 일정 거리안에 들어오면 음성 출력을 하도록 설계 계획합니다. 구매한 nRF의 통신 거리가 사전 조사한 거리보다 많이 짧아 RTT값을 계산 할 필요 없이 통신이 될때 신호등에서 음성이 출력 되도록 한 후, DFPlayer mini 모듈과 음성 파일을 저장한 SD카드를 이용하여 적절한 시간에 필요한 음성파일이 출력 되도록 합니다.
5.1.8. 8주차 : 아두이노 핀과 용량부족(uno -> mega)
아두이노 우노에 nRF, GPS, 지자기, 모터를 집어 넣기에 프로세서의 용량이 부족함을 인지 하고 용량이 더 큰 마이크로 프로세서 보드인 아두이노 메가를 구매하기로 결정합니다.
5.1.9. 9주차 : 서로 다른 프로세서간의 통신 문제발생 and 해결 UNO & MEGA
UNO와 MEGA사이에 통신 문제 발생하였으나, 코드에서 통신을 제한하는 부분을 제거하여 문제를 해결합니다.
5.1.10. 10주차 : 서로 다른 두 통신( GPS & 나머지 ) 간의 Serial 문제 소프트웨어적 해결
GPS 위성통신과 프로세서의 Serial 통신간의 충돌 발생하여 기존에 아두이노에서 지원하던 softwareserial.h 헤더파일을 수정하여 문제를 해결합니다.
5.1.11. 11주차 : 두 I2C 통신 모듈을 한 보드에 사용하여 충돌 발생
GPS와 nRF모듈의 충돌 발생, nRF를 작은 보드에 담아 동작시킵니다.
5.1.12. 12주차 : 보고서 작성
회로도, 시각자료, 플로우 차트, 시각자료 보고서를 작성합니다.
6. 전체 시스템 구성
7. 회로도 및 완성작
8. 참고문헌
· https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
· https://github.com/DFRobot/DFPlayer-Mini-mp3
· https://github.com/nRF24/RF24
· https://kocoafab.cc/make/view/657
· http://jamcoding.me/22111073439
· https://forum.arduino.cc/index.php?topic=385659.0
· http://forum.arduino.cc/index.php?topic=219375.0
[60호]안전거리 이격 시스템

2019 ICT 융합 프로젝트 공모전 참가상
안전거리 이격 시스템
글 | 명지대학교 이경수
1. 심사평
칩센 차량 안전 시스템에서 가장 기본적으로 적용되고 있는 형태가 개발 작품과 같은 형태입니다. 다만 여기에서 중요한 부분은 차량은 꼭 정지된 피사물이 아닌 움직이는 상대장치가 함께 존재한다는 것이고, 이것에 대하여 수많은 예외 상황이 존재하게 됩니다. 이러한 부분을 보완하고자 수많은 센싱 솔루션들이 검토되고 있고, 개발 작품에도 한가지의 방안뿐 아니라 다른 센싱 방안에 대하여 추가 고려하여 변수에 대한 최소화를 하는 과정이 있었으면 더 좋을 듯 합니다.
뉴티씨 안전에 대한 자동차와 관련된 시스템은 매우 다양한 종류가 있으며, 최근 라이다 등을 이용한 연구도 그 중 하나입니다. 앞차와의 안전거리 등을 알고 사고가 나지 않도록 정지시키는 기술은 목숨과 관련된 매우 중요한 기술입니다. 다양한 연구를 통하여, 앞으로 많이 발전해 나가시기 바랍니다.
위드로봇 전체 시스템 구현까지 완성도 높게 제작이 되었습니다. 기존 시스템에 비해 창의성이 돋보이는 부분이 추가되면 더욱 좋을 것 같습니다.
펌테크 작품에 사용된 로봇을 레고의 마인드스톰 대신 라즈베리 파이 또는 아두이노를 사용해서 독자적인 시스템으로 작품을 구현해보는 것이 좋지 않았을까 생각해봅니다. 학부과정의 학생이 구현하기에 적정한 난이도를 가진 작품이라고 생각합니다.
2. 작품 개요
도로 유형마다 다른 안전거리에 대한 정보 전달과 운전석와 조수석에서 내용을 확인하고 감속을 하여 안전거리를 유지할 수 있도록 하는 시스템이다.
2.1. 필요성
위와 같은 관련 자율주행 사고와 안전거리 미확보에 따른 사고 예방을 동시에 충족시키는 방법을 고민했습니다. 기술력의 대부분은 자율주행의 완성을 향해서 나아가고 있지만, 운전자와 주변상황을 모두 사람처럼 즉각적으로 판단하는 것에는 어려움이 있습니다. 특히, 사람을 인식하지만, 어디로 이동하고 있는 지는 파악 못하는 센서처럼 기계가 스마트해지고 자율주행이 된다고 하더라도 안전에 대해서는 사람이 직접적으로 제어할 수 있도록 해야 할 것입니다.
그 방법 중 하나로 현재 발전 중이고 상용화도 되어 있는 커넥티드 카를 중점으로 제어가 가능하도록 만드는 것을 생각했습니다.
2.2. 기대효과
1. 안전성 : 무엇보다도 중요한 사람의 안전을 기계를 직접 제어함으로서 예방과 사고를 방지할 수 있다.
2. 원활한 도로 주행 : 느리지도 빠르지도 않은 속도를 제안하며, 앞차와의 속도를 파악할 수 있어 급작스런 변화에도 대응이 가능하도록 설계한다.
3. 작품 설명
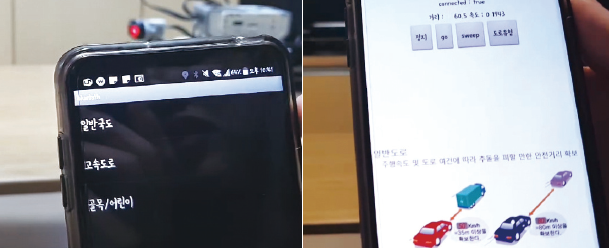
차량 종류에 구애받지 않고 설치할 수 있는 간단한 장치를 이용하여 데이터 값을 앱을 통해서 받고 어플을 통해서 사용자가 도로 유형에 따라 정보를 제공받고 경고를 할 수 있게 합니다.
3.1. 주요 동작 및 특징
3.1.1. 주요 동작
1. 도로유형을 선택할 수 있다. (자동차 카메라 연동이 안될 경우)
사용자가 타는 도로를 선택 시 자동으로 해당 안전거리와 속도가 제한이 걸린다. (속도를 과다하게 올릴 경우에는 속도를 자동으로 줄이도록 함 on/off 설정가능)
2. 도로유형 기준치 안전거리가 미만으로 측정될 시에 속도를 줄이도록 경고한다.
3. 안전거리 미만이 될 경우는 속도가 줄어들면서 30~0 km/h으로 진입될 경우 경고를 하지 않도록 하여 편의성을 높였다.(불필요한 기능제거)
3.1.2. 특징
1. 애플리케이션을 이용한 사용자의 편의성이 증가한다.
2. 시스템적인 측면을 애플리케이션이 아닌 자동차 시스템에 이식이 가능하다.
3. 타 사용자(앞서 가는 차량)의 데이터를 통해서 도로상황 파악가능하며 확장성을 지니고 있다.
3.2. 전체 시스템 구성
1. 애플리케이션으로 센서값을 전송받는 IoT
기술 실험 시에는 학교의 지원을 받아서 통신 가능한 레고마인드스톰을 이용하였다. 라즈베리파이 혹은 아두이노로도 구동가능 할 정도의 낮은 사양을 요구하지만, 통신이 가능해야한다는 조건이 있다.
2. 애플리케이션 혹은 시스템이 구동가능한 플랫폼
데이터를 받기 위한 플랫폼, 스마트폰 혹은 커넥티드카처럼 지속적인 데이터 통신이 가능해야한다.
자체 내부 데이터망이 있는 경우가 해당되야하고, 커넥티드카의 경우 센서를 전달받아서 실시간으로 대응이 가능해야 할 것이다. 현재 개발단계에서는 당장 적용할 수 있는 kit를 이용하였다.
3.3. 개발 환경
· 개발 언어의 경우 접근성이 좋은 앱인벤터를 사용하였다.
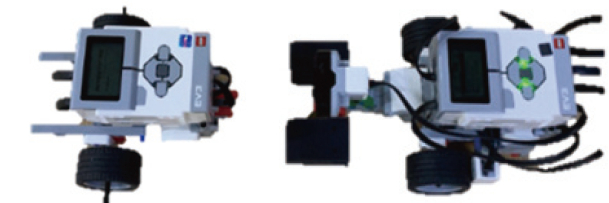
· 장비로는 조립 분해가 가능한 레고마인드스톰을 사용하였다.
4. 단계별 제작 과정
· app inventor를 이용한 애플리케이션 제작 : 레고마인드스톰과 연결된 라이브러리를 이용하였습니다.
· 자체모듈에 대해 커넥티드 카 개념 적용 : 레고마인드스톰에 리눅스 경량화 버전이 적용이 되어 블루투스통신이 가능한 것을 이용하였습니다.

4.1. 제작과정
4.1.1. 레고마인드 스톰 제작
조립 당시 단순한 에듀케이터를 따라서 조립(차량 소형화)하였다.

아이디어 구체화 후 불필요한 조향센서와 터치센서를 제거하였다. 추가적으로 안전거리 실험을 위한 추가적인 모듈 조립하였다.
4.1.2. 앱 인벤터를 이용한 애플리케이션 제작
1. 레고마인드스톰과 블루투스 연동
2. 거리 값 계산을 위한 실시간 통신
3. 속도 값을 추가하여 추가적인 통신
4. 정지와 시작 버튼으로 모듈 동작 설정
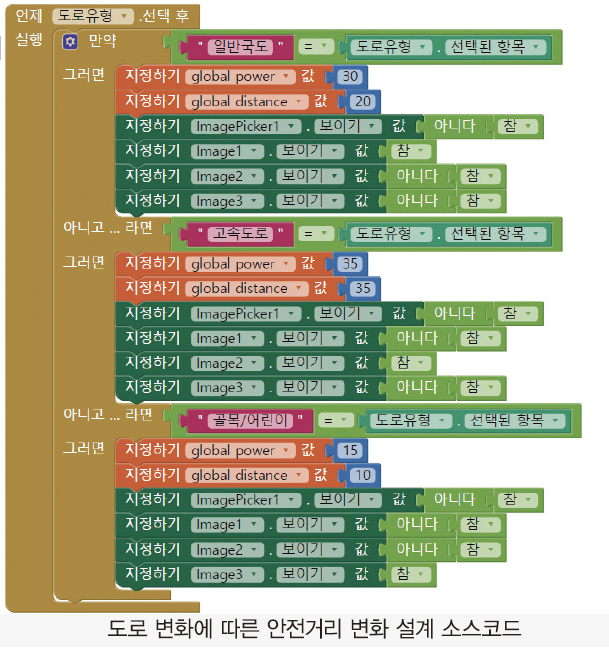
5. 도로유형에 따라 안전거리 변수를 적용하도록 설정
6. 관련 정보가 나타나도록 이미지 설정
5. 기타
· 블루투스를 이용한 통신
고차원적인 데이터 송수신을 가능하게 하였다.
· 커넥티드 카
차량 데이터 차체 보관 및 통신이 가능하게 하였다.
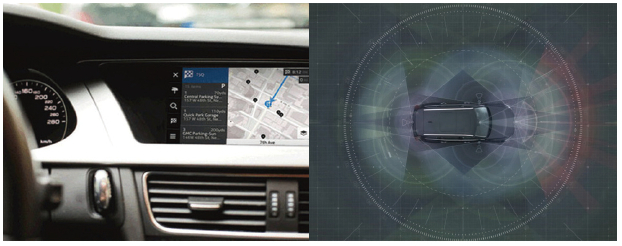
차량용 인포메이션 시스템 중 하나인 내비게이션이 커넥티드카의 일부입니다. 센서들의 정보를 모아서 자체적으로 판단을 가능하게 만드는 단계로 볼 수 있습니다. 특히, 중요한 점은 모든 시스템이 통신을 통해서 하나로 연결될 수 있다는 점입니다.
V2X(vehicle to everything)처럼 모든 것과 연결되는 것이 최종 목적지입니다. 궁극적으로는 자율주행차라고 볼 수 있습니다.
※ 벤츠, 볼보 등의 자동차 업체들은 애플과 파트너십을 맺고 2014 제네바모터쇼에서 카플레이를 탑재했습니다.
※ 독자적인 커넥티드 카 연합인 OAA(Open Automotive Alliance)를 발족했습니다. 혼다, 아우디, 제너럴모터스, 현대기아차 등 세계적인 자동차 업체들을 비롯해 LG전자, 파나소닉, 엔비디아 등이 가입했습니다.
5.1. 결과 및 적용가능성
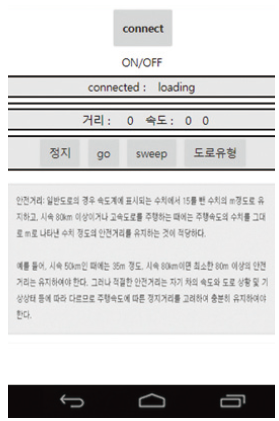
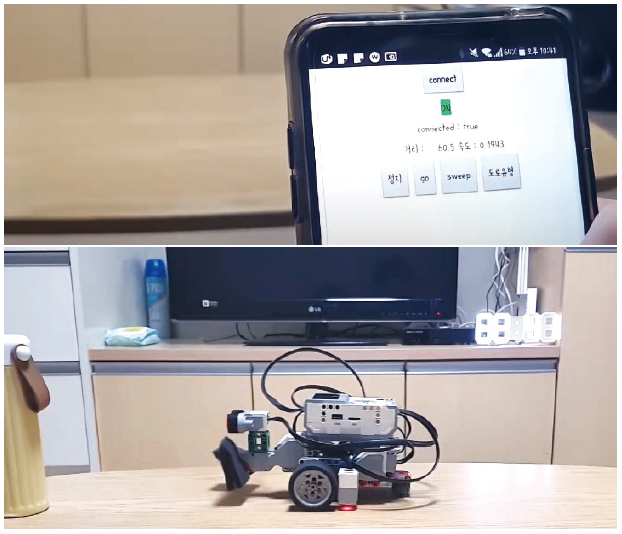
처음의 목표를 세웠던 것과 동일하게 돌발 상황에 사용자가 언제든 사용가능하도록 애플리케이션의 형식으로 완성하였습니다. 또한, 주행상의 변동물체를 초음파 센서로 인식하여 안전거리와 속도 값까지 실시간 블루투스 통신을 이용하여 핸드폰으로 받는 것을 가능하게 하였습니다.
도로유형(일반 국도, 고속도로 등)에 따라 안전거리 변수를 설정하였으며 커넥티드 카의 운전자와 다른 인원들이 차와 통신연결 후에 돌발 상황 발생 시 제어를 할 수 있도록 하여 안전사고를 막도록 하였습니다.
추가적으로 최종 형태인 자율주행차의 안전성 보완을 생각 하였습니다. 자율주행차의 경우에는 운전자가 아닌 인원들이 타고 다니는 운전수단이기 때문에, 조수석 혹은 뒷자리 사용자로 하여금 안전에 대해서 확인과 제어를 할 수 있도록 하는 것을 가능하도록 하였습니다. 즉각적인 대응이 어렵다는 문제를 해결하기 위해서 블루투스로 실시간 통신하여 차량과 사람이 연결되어 적절한 대응을 할 수 있게 만들어 안정성을 높였습니다.
기존의 커넥티드 카는 차량에 탑재는 센서를 이용하기 때문에 갑작스런 돌발 상황에 대해 적절한 대응을 하지 못합니다. 하지만, 불안정함에도 불구하고 자동차기업들의 커넥티드 카의 관심은 매년 점차적으로 증가하고 있는 추세이며 안전성에 대한 커넥티드 카의 연구도 증가하고 있습니다.
안전거리 이격 시스템은 돌발적인 상황이나 도로 유형에 따라 그 정보를 사람과 실시간 통신하여 안전성이 특화되었다는 장점을 지니고 있습니다. 커넥티드 카가 4차 산업혁명을 맞이해 우리의 생활을 180도 바꾸어 줄 미래형 자동차로 주목받고 있는 지금 무엇보다 안전을 위해서는 안전거리 이격 시스템이 필요할 것입니다.
우리의 삶을 더 편리하게 해줄 과학 기술이 있지만, 이에 앞서 충분히 예상되는 안전을 어떻게 해결해나갈지 안전거리 이격 시스템을 비롯한 제품들에 대한 수요가 증가할 것입니다.
5.2. 참고문헌
시현동영상 주소 : https://youtu.be/U1HgzHRUf8g
· http://w3.incom79.com/bbs_data/study_data/drive/summary10.htm
· https://www.sktinsight.com/97717
· http://smartsmpa.tistory.com/4474
· https://github.com/mit-cml/appinventor-sources/blob/master/appinventor/components/src/com/google/appinventor/components/runtime/util/ErrorMessages.java
· http://www.martyncurrey.com/android-mit-app-inventor-auto-connect-to-bluetooth/
· http://appinventor.mit.edu/explore/content/legomindstorms.html
· http://open-roberta.org/
· http://www.itworld.co.kr/news/92201#csidx2beed884a9d96f6abc6dbfc050e424a
[60호]주목받는 비분산적외선 가스센서란 무엇인가


이엘티센서
주목받는 비분산적외선 가스센서란 무엇인가
글 | 이엘티센서 천동기
광학식 가스센서인 비분산적외선 가스센서(NDIR)의 원리 및 이를 이용한 가스센서를 소개하고자 한다.
1. 가스 센서의 정의 및 종류
가스 센서는 가스의 농도(concentration)를 측정하는 센서이다. 여기서 농도는 전체 가스 중에 특정 가스가 차지하는 비율을 의미하며 그 단위로는 ppm, %, %LEL 등이 있다.
가스 센서의 측정방식(원리)은 다양한 분류가 있으나 가스를 검출하는 원리에 따라 분류해 보면 광학식, 접촉식, 복합식으로 나눌 수 있다. 광학식은 가스분자의 화학반응이 일어나지 않는 비접촉식이며 접촉식은 가스분자와 반응물질간에 직접 접촉되는 방식, 복합식은 광과 화학반응이 발생하는 원리이다. 다음 표1은 각 방식의 가스 센서에 대한 간략하게 비교 정리한 것이다.
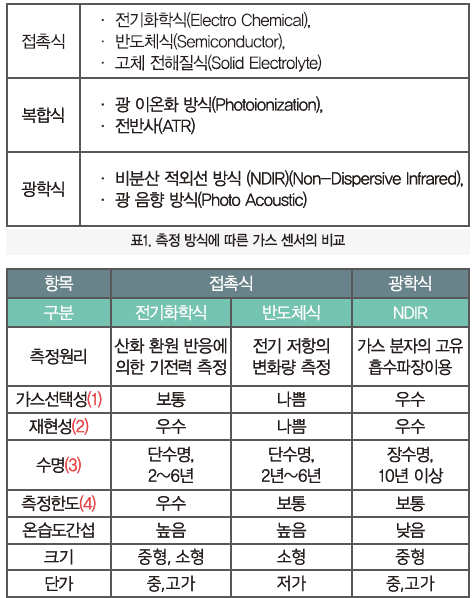
(1) 가스 선택성(Gas Selectivity) : 측정 목표 가스(target gas) 외의 다른 가스의 간섭없이 측정하는 특성
(2) 재현성(Repeatability) : 동일 환경 조건에서 가스 농도 변화 시 동일 농도 조건에서 측정되는 농도 오차
(3) 수명(Life Time) : 재교정(recalibration)을 포함하여 센서가 사양을 충족시키는 성능이 유지되는 시간
(4) 측정 한도(Lowest Detection Limit) : 0 영역에서 센서가 구분할 수 있는 최소 농도 변화 값
앞의 센서 대표 원리별로 간략히 특징과 장단점을 비교해 본다.
2. 접촉식 센서
2.1 반도체식 센서
접촉식센서의 대표적인 반도체식 가스센서는 감지 물질 반도체 표면에 가스가 접촉했을 때 일어나는 전기전도도의 변화를 이용하는 것이 많으며 대부분 대기 중에서 가열하여 사용하여 고온에서 안정한 금속 산화물이 주로 사용된다. 금속 산화물은 반도체의 성질을 나타내는 것이 많고, 이중 금속원자가 과잉 (산소 결핍)인 경우에는 n형 반도체, 금속원자가 결핍인 경우에는 p형 반도체가 된다. 이러한 금속 산화물 반도체 중 전기전도도가 크고 융점이 높아서 사용온도 영역에서 열적으로 안정한 성질을 가진 물질이 감지 소재로 센서에 이용되고 있다.
또한 검출회로의 구성이 간단한 편이고 가격이 저렴한 편이나 표면의 금속산화물 반도체에 의해서 전기전도도가 변하기 때문에 여러 종류의 가스에 영향을 많이 받고 습도에도 반응하여 정확한 가스농도 측정에는 단점이 있으나 MEMS의 소형화가 가능하고 상대적으로 가격이 저렴하여 정확도가 크게 중요하지 않는 대량 수요처에 많이 활용되고 있다.
생활속의 많이 사용되는 반도체 방식 센서는 온습도 센서가 있으며, 가스측정에는 휘발성 유기화합물(VOCs), 일산화탄소, 수소계등을 측정할 때 많이 사용된다. 다른 가스에 영향이 크고 고농도에 노출되면 수명과 측정오차가 커진다는 단점이 극복하기 쉽지 않은 과제이기도 하다.
2.2 전기화학식 센서
접촉식 센서의 또다른 대표적인 방식으로 전기화학식 센서가 있다. 전기화학식은 내장된 전극의 작용에 의해 측정 대상 가스가 산화 또는 환원 반응을 일으킬 때 발생하는 전류를 측정함으로써 가스의 농도를 검지한다. 내부에 보통 3개의 전극이 있으며 산화(환원) 반응이 일어나는 검지 전극(working electrode)과 이와 동시에 환원(산화) 반응이 일어나는 대항전극(counter electrode), 그리고 산화환원 반응과 함께 변화하는 전위를 감지하고 전위를 일정하게 유지하기 위한 참조 전극(Reference electrode)이다. 사용자는 센서 외부로 노출된 3개의 전극을 회로에 연결하여 사용한다.
사용자가 전기화학식의 정상작동 또는 성능평가를 위해서는 산소가 필요하기 때문에 공기중에서 실시해야 한다. 또한 표준가스를 주문할 때도 질소베이스가 아닌 공기베이스의 표준가스를 주문하여 시험해야 한다. 질소베이스의 표준가스에서 실시하면 반응량이 적어 측정치가 낮게 표시된다. 경험에 의하면 질소 환경에서 시험시 초기 실험에서는 약 10 ~20%정도 수치가 낮게 나온다.
통상 산업분야에서 사용하는 전기화학식 센서의 사용은 2년 정도이나 생활속에서 사용하는 센서는 대기중에 해당가스가 거의 없기 때문에 수명이 길게는 5년이상까지도 사용 가능한 센서도 판매되고 있다.
장점으로는 빠른 응답시간, 안정성, 낮은 농도도 감지 가능하고, 재현성이 우수하다. 반면 접촉식 센서의 단점인 다른 가스에 대한 반응성, 그리고 고농도에 노출시 수명이 빨리 단축된다는 단점은 원리상 나타나는 현상이다.
주로 전기화학식 센서로는 일산화탄소, 산소, 황화수소, 암모니아가스등을 측정할 때 유리한 성능을 갖는다.
3. 복합식 센서
VOCs를 측정할 때 반도체방식은 정확성에서 타방식에 비해 어려움이 있으나 광이온화(PID Photoionization detector)방식으로 측정할 때 우수한 정확성과 재현성을 가진다.
PID 원리는 자외선(UV) 빛을 가스분자에 조사하여 양이온과 음이온화시키고 이를 전극으로 집전시켜 가스농도에 비례한 전류를 감지하며 광 조사와 화학적 반응을 동반한다.
현재 PID 센서를 장착한 측정기로 VOCs를 ppm 이하 ppb 저농도까지 재현성있게 측정하고 있다. 하지만 경제적인 부담 없이 사용하기에는 가격이 타 방식에 비해 상대적으로 많이 고가이기 때문에 아직까지 타 방식의 센서처럼 확대되지 못하고 있고 VOC측정에는 주로 반도체방식을 많이 사용하고 있다.
PID 특성으로 습도에 간섭이 적고 감도가 우수한 장점이 있다.
4. 광학식 가스 센서
비분산적외선(NDIR Non-Dispersive Infrared)식은 여러 종류의 가스 측정 원리중에서 비접촉식의 대표적 방식으로 가장 정확성과 신뢰성, 안정성, 긴 수명등의 장점을 많이 가지고 있다. 하지만 광학계 부품의 고가로 인해 타 방식에 비해 상대적으로 가격이 높았다. 따라서 NDIR식은 기존에는 주로 고가의 분석기에 사용되어 왔으나 지속적으로 광학센서의 사용량이 크게 늘어나면서 광학계 부품들의 가격이 낮아져 일상 생활속에서도 사용할 수 있게 되었다. 예로서 가장 대중화된 NDIR 이산화탄소센서의 경우는 전기화학식이나 반도체식에 비해서도 가격의 차이가 없어졌다. 이로 인해 시장에서 이산화탄소 센서는 거의 90%이상을 NDIR식을 사용하고 있다. 최근 코로나바이러스로 인해 음주 측정용 알콜 센서 방식도 기존에 주로 사용하는 반도체식, 전기화학식 방식에서 비접촉식인 비분산 적외선식이 확대되고 있는 것도 정확성이 높고 비접촉으로 감지하기 때문이다. 이산화탄소 센서의 경우처럼 광학식의 장점이 많아 가격이 낮아지면 기존 접촉식 센서들의 상당부분이 광학식으로 확대될 것으로 예상된다. 그리고 기존까지는 광학식 기술은 선진국에서 앞서 있었으나 국내 기술의 발전으로 상당부분 대등한 기술수준까지 오게 되었다.
다음은 이엘티센서의 중점 사업 기술 분야인 NDIR센서에 대해서 구체적인 핵심 기술과 대표 신제품을 알아본다.
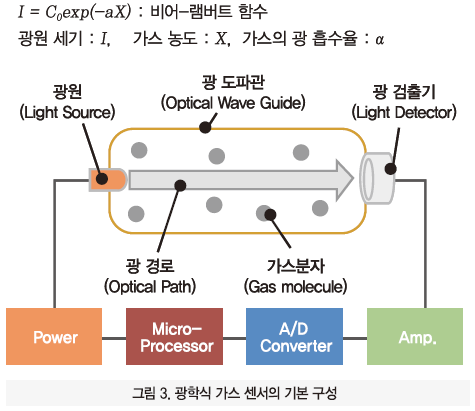
4.1. 광학식 가스 센서의 기본 구성
광학식 비분산적외선(NDIR) 가스 센서는 가스 분자가 특정 파장의 광을 흡수하는 특성을 이용하여 가스 농도에 대한 광 흡수율을 측정하는 방식이다. 검지부의 중요 부품은 광원(Light Source)과 광 검출기(Light Detector), 그리고 광이 지나가는 경로와 광 효율을 결정하는 광 도파관(Optical Wave Guide 또는 Cavity – 아래 금색 부)이 있고, 광신호를 처리하는 회로부와 제어를 담당하는 펌웨어 부가 있다.

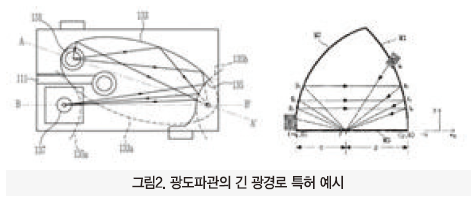
이 중에서 광 도파관은 각 회사의 고유한 기술이며 광경로, 길이, 집광도 등의 광 효율성을 결정는 핵심기술로서 회사의 주요 특허 대상이다. 이엘티센서는 국내, 미국, 일본, 중국, 유럽등에 20여건의 특허를 등록하여 국내에서 가장 많은 비분산적외선 센서 관련 기술특허를 보유중이다.
아래 그림들은 특허로 등록된 광 도파관의 광 이동 구조의 예시 들이다.
통상의 타 회사의 간단한 직선형구조 보다 더 긴 광경로를 이루도록 기하학적 구조를 배치하여 정확성과 정밀성을 높일 수 있다.
NDIR 센서 모듈의 구성 흐름을 간단히 보이면 아래 그림과 같이 광 검출기에서 출력되는 전기 신호는 증폭 회로와 아날로그-디지털 변환기(ADC)를 거쳐 처리 장치(CPU, Micro Processor)에서 가스 농도를 계산하여 출력해준다. 농도 산출은 기본적으로 비어-램버트 함수를 이용하지만 각 설계환경에 맞추어 적정하게 변형 도출되어야 한다.
4.2. NDIR로 측정하는 가스의 광학적 특징
측정기의 크기에 제한 없이 수 미터 이상 광 경로를 길게 할 수 있다면 매우 더 낮은 농도를 측정할 수 있다. 하지만 분석기가 아닌 센서류는 크기와 관련되기 때문에 수 센티미터 크기에서는 낮은 농도를 측정할 수 있는 한계성이 있다. 현재 이산화탄소와 메탄은 수 센티 크기의 모듈로도 제작 가능한 기술이 개발 되었고 지속적으로 소형화되고 있으나 일산화탄소, 이산화질소등의 대기중에 낮은 농도까지 측정해야 하는 가스는 소형화하는데 많은 어려움이 있어 아직 정밀하게 측정할 수 있는 광학식 센서로는 연구개발 단계에 있다. 수년 안에 상품화될 것이다. 아래 표2는 대기중의 주요 가스와 흡수파장, 그리고 가스분자의 광 흡수특성에 따른 간략비교를 보여준 것이다.
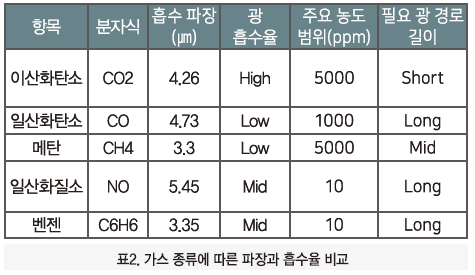
모든 분자는 광을 흡수하면 열 진동(Thermal Vibration)을 하게 되는데 흡수하는 광은 원자 간 결합의 세기에 따라 그 파장(또는 진동수)이 달라진다. 예를 들어 이산화탄소의 경우 3종의 열 진동 모드(Thermal Vibration Mode)를 갖는데 표3과 같다.
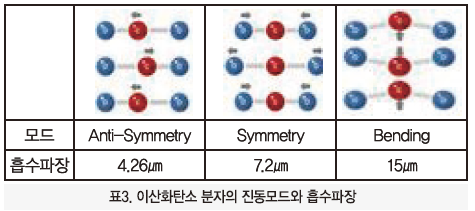
일반적으로 단원자 분자의 결합력이 강하여 흡수하는 에너지가 더 높은 단 파장대의 광을 흡수하고 다원자 분자의 경우 결합력이 약하여 에너지가 낮은 장 파장대의 광을 흡수한다. CO2의 경우 가장 에너지가 높은 4.26㎛ 파장대를 이용하여 센서를 만들고 있다.
하지만 산소와 질소 같은 단원자 분자로 되어 있는 것은 적외선 흡수율이 적어서 NDIR 센서는 만들기 어려운 한계성이 있다.
5. 가스 센서의 개발 및 시장의 요구 동향
기술의 발전에 따라 타 산업과 마찬가지로 가스센서도 시장에서는 지속적으로 더 작은 센서, 더 낮은 소비전류 센서, 더 낮은 가격의 센서를 요구하고 있다. 정확도 또한 유지하면서 이러한 성능을 요구하기 때문에 센서 제조사들은 지속적으로 제품개발과 연구에 더 많은 비용과 시간을 투입해서 대응하고 있지만, 기술발전의 속도가 느리고 기초과학에서 출발하는 센서기술의 특성상 원천 소재와 광 부품등의 동반 발전과 지원이 반드시 필요하다.
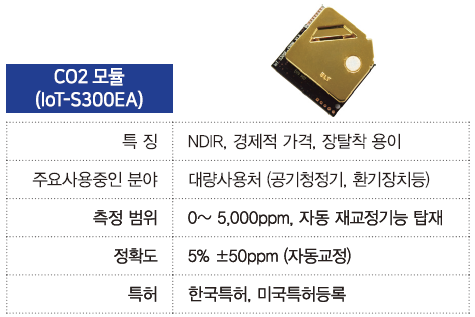
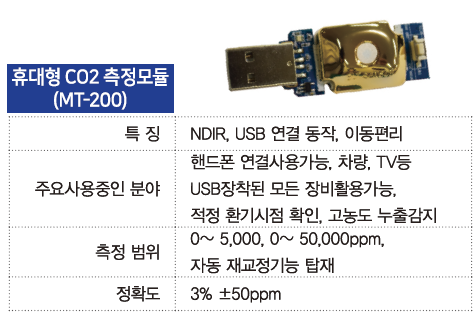
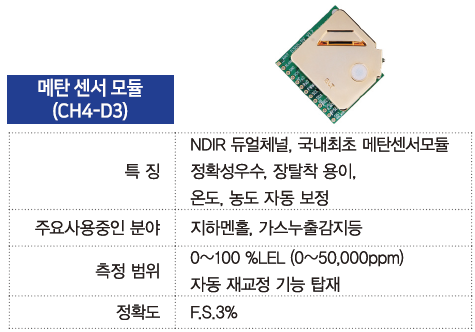
다음에는 현재 개발되어 판매되고 있는 대표적인 NDIR 가스센서(CO2, CH4)의 센서모듈의 사양과 특징을 소개한다.
아래 소개한 신제품 가스센서는 디바이스마트 사이트에서 손쉽게 구입할 수 있어 편리하다.
6. 대표적인 CO2, CH4, CO 센서 모듈, 제품

7. 마무리
가스센서의 개발은 원천기술 확보를 통해 선진국으로부터 기술 독립이 가능하며 센서의 신뢰성을 검증받는데 최소 10년 이상 센서 개발 경력이 있어야 한다. 또한 전세계 수출을 위해 독자적인 센서로 인정받기 위해 국내외 다수 특허 확보가 필요하고 다양한 신모델 개발이 필요하다. 이러한 노력을 계속하고 있는 이엘티센서는 국내 센서기술이 선진국과 대등한 기술수준으로 인정받을 수 있도록 견고한 기초를 다져가고 있다.
[60호]Touchless Signage Display


2019 ICT 융합 프로젝트 공모전 참가상
Touchless Signage Display
글 | 동서대학교 황영아, 임은혜, 박준현, 허준혁, 우동우
1. 심사평
칩센 여러 측면에서 흥미로운 작품과 의도로 생각됩니다. 기술적으로 보았을 때 가장 중요한 것이 Kinect camera로 보이며, 나머지 시스템은 image process등의 동작을 하게 될 것으로 보이고, 그 외에 물품의 위치 가격 등을 알려주는 것은 기술보다는 서비스 구성으로 판단되는데, Kinect camera에 대한 의존도가 너무 높아 보입니다. 키오스크 시스템 적용에 대한 단점 중 많은 부분이 유사하게 적용되어야 할 시스템으로 보이며, 이에 대한 개선점이나, 유리한 점을 조금 더 자세하게 설명하였으면 좋을 듯 합니다.
뉴티씨 구현하려고 하는 기능에 대한 연구는 다른 곳에서 이미 구현된 것이긴 하지만, 재미있는 아이디어로 실제로 구현해 보기로 한 것 자체에 큰 의미를 둡니다. 여러 가지 디스플레이에 대한 제안들이 있지만, 현실화 된 후 상업적으로 사용되지 못한 것들도 많이 있는데, 이렇게 새로운 디스플레이에 대한 것들은 무엇인가 포인트가 되는 제품이 만들어져야 상용화되는 경우가 종종 있습니다. 무엇인가 재미있는 3D광고판 등을 제작하거나, 공간터치 등을 제공한다면 편리하고 재미있는 미래세상이 펼쳐지게 될 것입니다.
위드로봇 아이디어가 뛰어난 작품인데, 완성하지 못한 점이 아쉽습니다.
펌테크 제출된 보고서 내용 고려하자면 작품에 대한 기획의도는 상당히 우수하다고 생각됩니다. 작품이 실제 완성도 높게 완성이 된다면 실생활에 다양한 활용이 가능하리라 생각됩니다. 단 출품작의 경우 계획단계 이상의 아무런 진전이 없는 것으로 판단됩니다.
2. 개요
2.1. 연구 배경
2.1.1. 많은 디스플레이 사용에 따른 질병의 원인
패스트푸드점을 이용하는 소비자들의 사용량이 급격히 늘었고, 빠르게 주문을 받고 음식을 내주기 위해서 무인주문 기계가 각각의 매장에 놓여졌다. 예를 들면, 맥도날드에서는 햄버거를 사기 위해 직접 카운터에서 주문을 하는 방식이 있지만, 대부분 앞에 놓인 무인주문기계를 사용한다. 사람의 손이 직접 디스플레이 화면을 터치하기 때문에 각종 세균에 노출된다. 이를 통해 각종 질병에 감염된 사람으로부터 치명적인 병균과 바이러스가 전염될 수 있다.
2.1.2. 키오스크 디스플레이 사용의 한계
많은 기술의 발달로 인해 우리는 손쉽게 원하는 것의 위치를 찾을 수 있게 되었다. 자동차를 이용해서 목적지로 가려고 할 때 내비게이션을 통해 원하는 곳의 위치까지의 길을 알 수 있고, 포털사이트의 위치 관련 서비스를 통해서 한눈에 위치를 파악할 수 있게 되었다. 하지만, 복잡한 대규모 구조물에서는 입구나 중심지의 안내판 외에는 자세하게 위치를 찾을 수 없거나 놀이공원에서는 큰 안내 지도뿐이다. 그 또한 세부적으로 정보를 얻을 수 없기 때문에 위치를 파악하기에 불편함이 있다. 그 결과, 다시 키오스크 디스플레이로 돌아와 위치를 찾아야 하는 고충이 있다.
2.1.3. 디스플레이(모니터)의 빈번한 파손
평판 디스플레이 혹은 터치 스크린을 적용한 정보 디스플레이는 내적, 외적 고장에 노출되어 있다. 외부적으로 고장 나는 것은 모니터가 직접적으로 노출되어 있어서, 누군가 센 압력을 가해서 부서질 상황도 있고, 직접적인 무언가에 의한 충돌로 화면이 파손되는 상황도 있고, 높은 곳에서 실수로 떨어뜨려 모니터가 고장이 나는 경우도 있다. 내부적으로는 강한 압력으로 인한 모니터 내부의 LCD 패널이 파손 될 수도 있고, 그 위에 다양한 액체류에 의해 파손이 되는 경우도 빈번하다. 이러한 모니터 파손에 대하여 경제적, 산업적 손실이 매우 심각하며, 디스플레이의 파손은 정보를 획득하려고 하는 다양한 고객에게 부정적인 이미지와 혼선을 야기한다.
허상 디스플레이 연구팀은 기존 정보 디스플레이가 갖고 있는 기술적 한계점과 다양한 문제 즉, 질병의 전염과 정보를 쉽게 활용할 수 없는 키오스크 디스플레이의 제한된 정보 전달력, 그리고 빈번한 공공 디스플레이의 파손에 따른 손실을 해결하려고 본 연구를 진행하였다.
2.2. 아이디어 도출
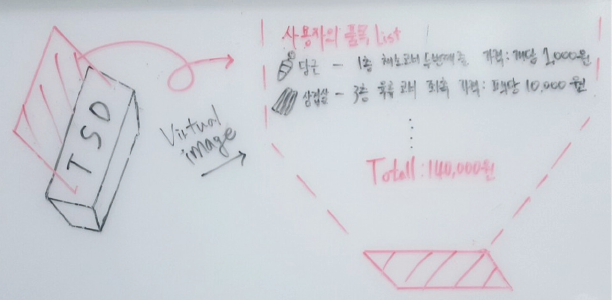
2.2.1. Touchless Signage Display
기존 평판 정보 디스플레이는 직접적인 화면 터치방식으로 인하여 사용자들에게 직간접적인 시각적 불편을 불러일으킨다. 기존 방식은 사람의 손에 영향을 받아 화면의 영상을 직접 투시하기 때문에 고휘도 영상이 눈에 악영향을 발생시킨다. 그렇기 때문에 정보 영상을 공기(Air)중에 허상 영상을 투영시켜 영상의 간접 이미지를 사람이 인식할 수 있는 방법을 고안하였다. 영화 <아이언 맨>을 예로 들자면 토니가 버튼 하나만 눌러도 바로 화면이 나오며, 허상에 터치를 해서 자기가 원하는 정보를 얻거나, 또는 작업을 하고 어디에서나 스크린을 띄어서 장소에 제한을 받지 않는 실용성을 보여준다.
2.2.2. Touchless Signage Display 적용분야
1) 대형 쇼핑몰은 어떻게 적용을 시킬 것인가?
대부분의 사람들은 원하고자 하는 물품의 위치를 빠르고 손쉽게 찾기를 원한다. 하지만 물품의 정확한 위치를 파악하는데 있어 고충을 겪는다. 이런 대형 쇼핑몰에서의 불편함을 개선하기 위해서 카트 손잡이에서 사용자가 찾고자 하는 물품이나 원하는 길을 알려주는 디스플레이를 고안하였다. 이 아이디어를 학교, 관광지, 놀이공원 등등 다양한 공공시설에 적용된다면 사람들에게 최단의 원하는 길을 제공해주며 또한 시간소비를 줄여줘 사람들이 큰 불편함을 해소할 것이다.
2) 기존 키오스크를 대체하여 어떤가?
기존 키오스크를 사용해 왔던 사용자들의 조사 결과로 ‘고장이 나면 수리하기 힘들다’, ‘터치가 느리다.’, ‘특정 장소에만 설치되어 있다.’, ‘크기가 크다’는 불편한 점을 찾을 수 있다. 이러한 불편한 점들을 고려하여 쉽게 구할 수 있는 부품들로 구성하였고 고장이 발생하더라도 쉽게 고칠 수 있도록 하였다. 또한, 터치를 하여 신호를 H/W로 보내는 방식이 아닌 동작을 인식하여 H/W로 보내기 때문에 그 속도가 기존의 키오스크보다 빠르고, 크기에 제한성이 기존 키오스크보다 현저히 낮아 사람들이 자주 이용하는 장소에서 적용이 가능한 제품이다.
2.3 작품에 대한 상세 접근방법과 기대효과
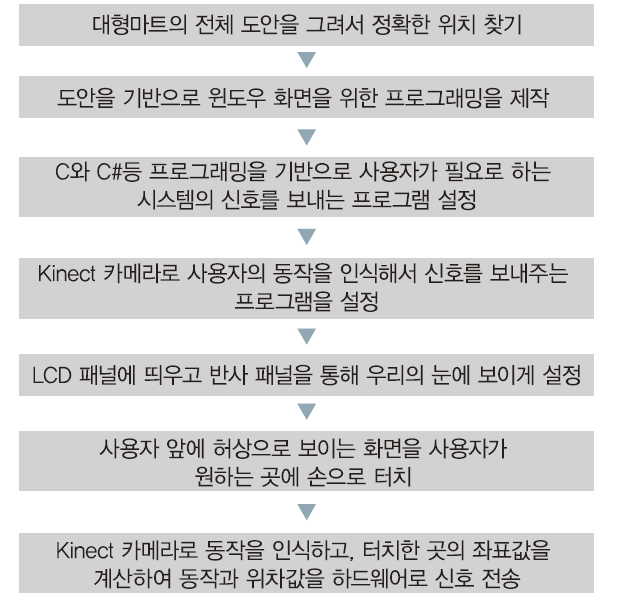
2.3.1. 작품 Touchless Signage Display를 만들기
2.3.2. Touchless Signage Display 적용방안
1) 마트에서 찾고자 하는 물품 선택
2) 카트 손잡이에 띄워진 화면에 물품 클릭
3) Kinect 카메라가 동작 인식, 좌푯값을 하드웨어로 송신
4) 클릭 후, 화면이 넘어가면서 물품이 있는 위치를 내비게이션처럼 안내
2.3.3. Touchless Signage Display의 경제적 효과
1) 위치 탐색에 효과적
기존으로 사용하는 제품들은 단순히 그림판으로만 되어있거나 영상에 직접적인 터치를 하는 것으로 이루어져 있다. 하지만 Touchless Signage Display는 사용자가 찾고자 하는 위치들이 허공에 영상에 뜨며 터치를 하지 않는 방식으로 되어있어 가고자 하는 곳을 좀 더 쉽게 찾을 수 있다. 그리고 복잡하지 않고 단순하게 볼 수 있기 때문에 어느 곳에서든 적용이 가능하고 여러 가지 방면으로 응용이 가능한 작품이다.
2) 간단한 시스템 체계 및 운영체제
주 메인인 Kinect camera를 이용하여, 보다 간단한 시스템 체계의 원리를 나타낸다. 최소의 구성품으로 최대의 효과를 나타내기 때문에 고장이 났을 경우 간편하게 고칠 수 있다. 그리고 Kinect camera가 사용자의 손을 인식할 수 있게 프로그램을 만들고 panel에서 영상만 추출되므로 보다 간편한 운영체제를 가지고 있다.
3) 관광 사업 극대화
위치 검색을 필요로 하는 장소, 즉 공공장소나 학교 등 어디에서나 사용이 가능하며, 특히 외국인들이 한국을 찾는 경우 더욱 위치를 찾기 쉽게 시스템 되어 관광사업에 있어서 많은 경제적 효과를 불러일으킬 수 있다. 또한, 모르는 장소의 위치 정보를 편리하고 자세하게 획득할 수 있다.
2.3.4. Touchless Signage Display의 응용 및 적합성
1) 관광 책자 : 관광 책자는 2D로 되어있는 이미지로, 가고자 하는 위치를 정확히 알 수가 없고 위치 정보에 대한 정확성이 떨어진다. 이러한 단점을 보완하여 Touchless Signage Display 제품을 소형화시켜 사용자가 들고 다닐 수 있게 응용이 가능하다. 또한, 관광객에게 대여해 주는 시스템으로 만들며 2D 관광 책자가 아닌 Touchless Signage Display을 소형화시킨 제품을 사용자가 들고 다닌다면 전보다 사용자가 원하는 목적지를 쉽게 향해 갈 수 있을 것이다. 또한, 영상이 허공에 떠 있기 때문에 보다 시각적으로 편리하게 사용자가 이동하면서 볼 수 있다.
2) 대형 쇼핑몰 : 대형 쇼핑몰의 경우 불편한 점은 사용자가 원하는 물품을 쉽게 찾을 수 없다. 대부분 길을 물어보거나 층마다 분류되어있는 안내 표지를 보고 찾아간다. 하지만 이러한 불편함을 해소하기 위해서는 Touchless Signage Display 시스템을 대형 쇼핑몰에 적용시켜 카트에 부착시키는 것이다. 카트에 부착된 장치를 통해 사용자는 사고 싶은 물품들의 위치를 쉽게 알 수 있다.
3) 주차장 : 보통 주차장들은 주차할 수 있는 공간 개수만 화면에 알려져 있다. 하지만 주차장의 빈 공간의 위치 정보를 알 수 없다. 이러한 불편함을 해소하기 위해서는, 먼저 자동차에 Touchless Signage Display 제품을 응용하여 차량이 주차장에 들어가는 순간 자동으로 운전자가 들어간 주차장과 Touchless Signage Display 제품과 연결되어 이 제품에 빈 주차공간의 위치를 허상으로 보여준다. 주차 공간을 찾기 위한 시간을 절약할 수 있고 시각적으로 간편하게 위치 정보를 알 수 있다.
3. 작품 설명
3.1 주요 동작 및 특징
3.1.1. Touchless Signage Display 시스템의 구성품과 동작
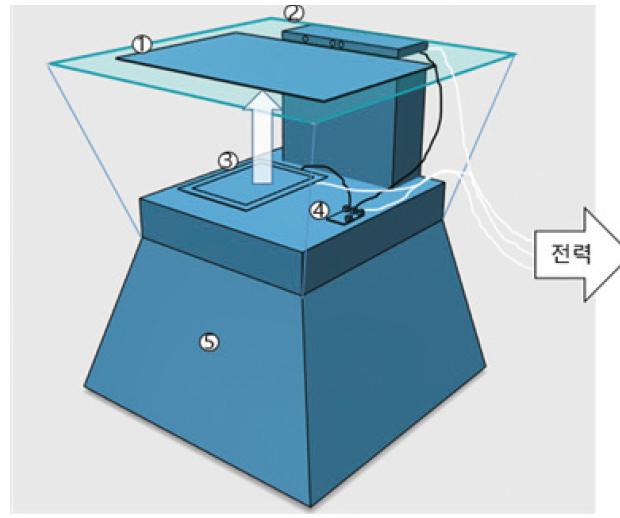
Touchless Signage Display 시스템은 C, C#을 기반으로 한 HW(회로설계 및 PCB 제작) 및 C, C#을 기반으로 한 Kinect의 제어알고리즘의 SW를 기반으로 설계되어 동작하는 시스템이다. 이 시스템을 이루는 제품들은 LCD패널, 반사 필름, Kinect camera, Raspberry Pi 등으로 구성되어있다.

1) Raspberry Pi : 시스템의 본체 역할을 하는 것으로 C 및 C#으로 프로그래밍 과정을 통해 사용자의 손을 Kinect camera가 인식을 할 수 있게 해준다. 다음으로 Kinect camera의 역할인데 이것은 사용자의 손을 인식할 수 있게 하는 역할을 한다.
2) LCD패널 : 모니터를 대신해서 사용하는 것으로 Raspberry Pi에 저장한 영상들이 LCD패널에 출력되는 시스템이다.
3) 반사 필름 : LCD패널에 나오는 영상들을 반사 필름을 통해 허상으로 나오게 해주는 역할을 한다. 따라서 Raspberry Pi를 통해 LCD 필름에 영상이 출력되고 이러한 영상들이 반사 필름에 반사되어 허공에 뜨게 된다. 허공에 뜬 영상에 사용자가 손을 대면 Kinect camera가 사용자의 손을 인식하여 사용자가 허공에 떠 있는 영상 속에서 원하는 정보를 볼 수 있도록 동작 되어있다.
4) Kinect camera : 복잡한 컨트롤 없이 몸의 동작을 인식하는 카메라로 키넥트 센서의 핵심 기능인 depth 센서는 단색 cmos 센서와 적외선 레이저 빔 프로젝터로 구성, 적외선 IR 카메라 센서가 정보를 받아 pixel당 거리가 측정, 데이터를 프로세서가 처리하여 Kinect 센서 앞의 사용자를 인식한다.
3.1.2. Touchless Signage Display의 차별성
1) 허공에서 인식 가능 : 기존 터치스크린 제품의 경우 사용자가 화면에 특정한 명령어 부분에 손이나 특수 장치를 갖다 대면 그 명령이 실행될 수 있게 되어있다. 하지만 Touchless Signage Display는 사용자가 화면에 직접적인 터치가 없어도 허공에서 Kinect camera가 사용자의 손을 인식해 명령이 실행될 수 있다.
2) 특정 물질이 묻어도 인식 가능 : 터치스크린들의 단점은 손에 물이나 기름 등 특정 물질들이 묻으면 사용자의 손이 인식되지 못한다는 점이다. 우리는 이러한 단점들을 보완하여 허공에서 조작이 가능하기 때문에 사용자의 손에 특정 물질이 묻어도 작업수행이 가능하다.
3) 이물질이 표면에 묻지 않음 : 사용자가 화면에 직접 터치함으로써 생기는 지문들이나 이물질(물, 기름 등)들이 표면에 묻게 된다. 하지만 허공에 손을 터치해 사용자의 명령이 인식되기 때문에 지문이 묻거나 이물질이 발생하지 않기 때문에 시각적으로 더욱 편하고 사람들의 손을 통한 질병도 피할 수 있다. 따라서 Prevent a Disease 시스템이라고도 할 수 있다.
4) 고장 날 확률 감소 : panel 화면에 직접적인 접촉을 하지 않아 고장 날 확률이 매우 낮다. 기존의 panel들은 사용자가 직접적인 터치를 함으로써 panel이 고장이 빈번히 발생하기 때문에 이러한 단점을 보완할 수 있다.
5) 창의적인 접근 방법 가능 : 기존 터치스크린은 명확히 한정된 메뉴에서 선정하므로 사용자의 오류를 제거한다는 장점이 있지만, Touchless Signage Display는 기존 터치스크린의 장점을 더욱더 극대화 시켜 다양한 분야에서 응용이 가능하다.
3.2. 전체 시스템 구성
3.2.1. 주요 구성부품
1) Kinect camera
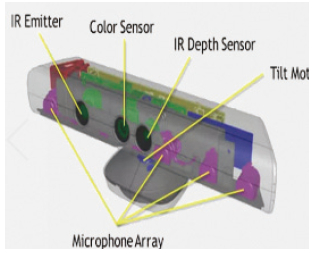
(1) Kinect camera 3개의 렌즈로 구성된다.
(2)왼쪽 렌즈는 적외선 송출프로젝터, 전면에 픽셀 단위의 적외선 송출한다.
(3) 가운데 렌즈(컬러 센서)
- RGB (Red, Green, Blue) 구성한다.
(4) 적외선 깊이 카메라 : 송출된 점들이 반사되는 것을 받아들여 물체를 인식한다.
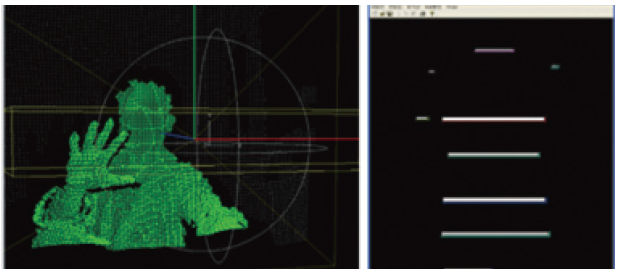
(5) Kinect 카메라를 통한 motion 인식 알고리즘
2) Raspberry Pi 3 : ‘초소형 컴퓨터’로, C와 C# 등 다양한 프로그래밍 언어로 이용 가능 하며, 사용자가 얻고자 하는 정보에 관한 영상 첨부가 가능하다.
3) 3D 반사필름 : Raspberry Pi 3에 저장되어 있는 영상을 허상 화면으로 전환이 가능한 부품이다.
4) LCD패널 : 3D 반사필름으로 통해 전환된 화면을 사용자가 눈으로 볼 수 있는 평판 디스플레이이다.
5) 아크릴판 : 단한 시제품을 제작할 때 사용하며, 안에 부품들을 정리할 수 있고 깔끔한 외형 제작이 가능하다.
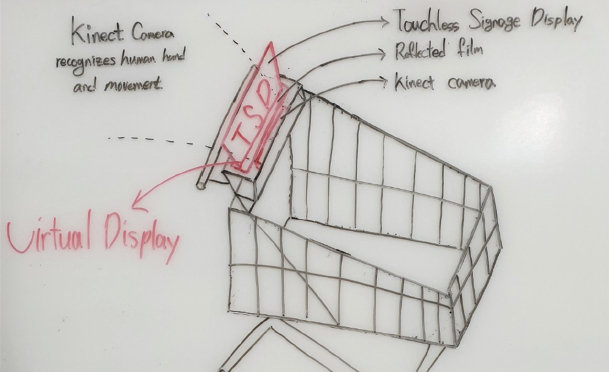
3.2.2. 작품 설계 구조도
① 반사 필름 ② Kinect camera ③ LCD패널 ④ Raspberry Pi ⑤ 아크릴판
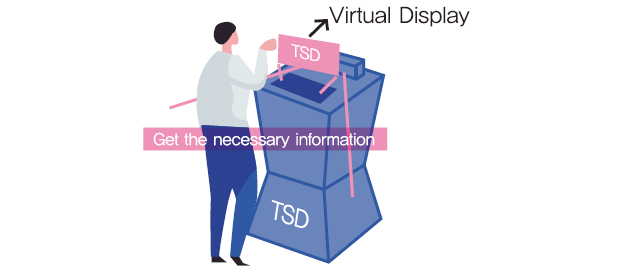
3.2.3. 작동과정
(1) 사람들이 지정된 영역 안에 들어오면, 자동으로 홀로그램이 켜져서 눈앞에 나타나고 없으면 사라진다.
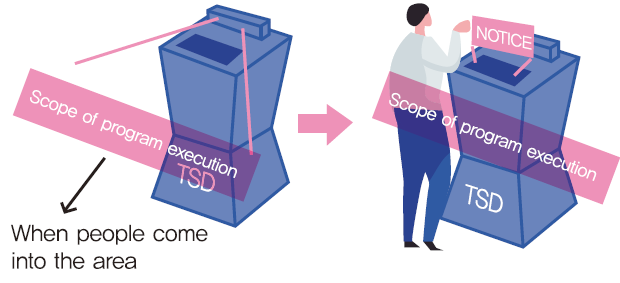
(2) 사람들이 홀로그램을 터치하면 원하는 화면으로 넘어간다.

(3) 내가 원하는 정보를 얻는다.
3.3. 개발 환경
개발언어 : C언어, C#
TOOL : Microsoft Visual Studio, Raspberry Pi
사용시스템 : OSHW
운영체제 : 유닉스, 라눅스(커널), 라즈비안