Joystick을 이용한 AstroBoyS Mecanum platform Ⅱ/Ⅲ 구동

안녕하세요.
오늘은 저희의 주행로봇 제품인 Mecanum PlatformⅡ/Ⅲ에 조이스틱을 연결하여 구동시켜보려합니다.

Mecanum Platform은 기본적으로 RC조종기와 함께 판매되고있는데요.
혹시나 RC조종기가 아닌 내가직접 만든 조이스틱을 사용하여 Mecanum Platform을 구동시키고 싶다!!
하시는 분들을 위해 사용방법을 알려드리려고 합니다 .
물론 , 조이스틱은 기본 구성품이아니기에 부품은 사용자가 알아서 해야 된다는점이 있지만 저희 디바이스마트에서
손십게 구하실수 있으므로 걱정은 쿨하게 생략하도록 하겠습니다.
자, 먼저 Mecanum Platform의 메인 Control Panel을 살펴보도록 하겠습니다.
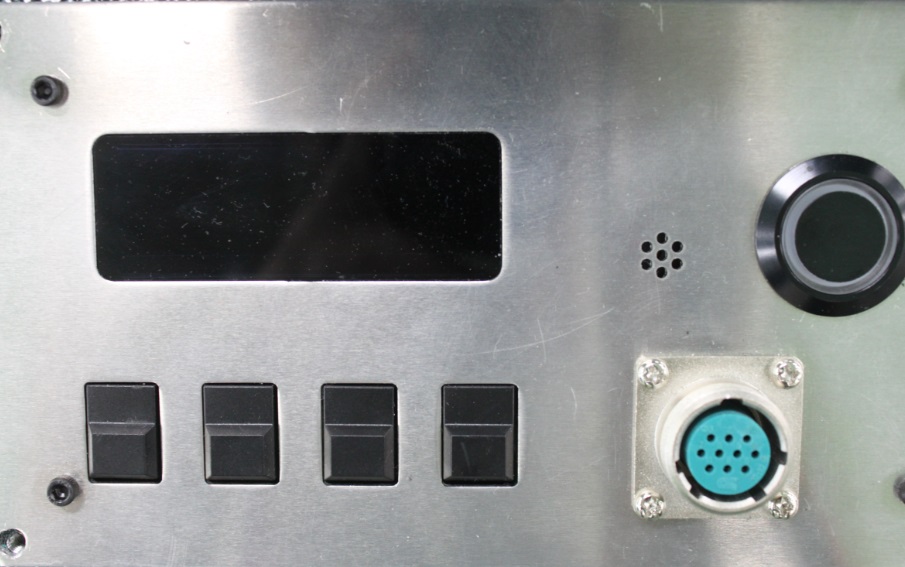
위와같이 생겼는데요. 여기서,

바로 이 단자가 Joystick과 연결해주는 부분인데요.
그렇다면 본격적으로 조이스틱 연결하기에 들어가겠습니다.
먼저 준비물이 몇가지 필요한데요.
첫번째가 조이스틱 입니다. 조이스틱은 사용하기 편한 것으로 골라서 사용하면 되는데요
저같은 경우는 조이스틱 200-M4 라는 제품을 사용하였습니다.

다음은 스위치 입니다. 스위치는 일반 푸시버튼 스위치인 PB86-AO 를 사용하였습니다.

스위치는 다양한 옵션을 위해 사용할 수 있습니다만(최대3개) 저는 Mecanum Platform의
동작mode변경을 위해 하나만 사용하였습니다.
두번째는 좌,우로 이동이 가능한 Mecanum mode 입니다.
다음은 커넥터 단자와 이 조이스틱보드를 연결시켜줄 케이블과 커넥터가 필요합니다.
맨위에 사진에서 보시면 아시겠지만 단자에는 총 10개의 구멍이 나와있는데요.. 이 단자를 위한 케이블로
RS232 실드케이블-10C 을 사용하였고, 단자용 커넥터는 SCC-16-10P를 사용하여 연결해 주었습니다.
조이스틱 보드와 케이블을 연결시켜주는 부분은 일반 몰렉스커넥터로 선택했습니다 .
그 다음, 위의 부품들을 아래 사진과 같이 만능기판에 장착하였습니다.
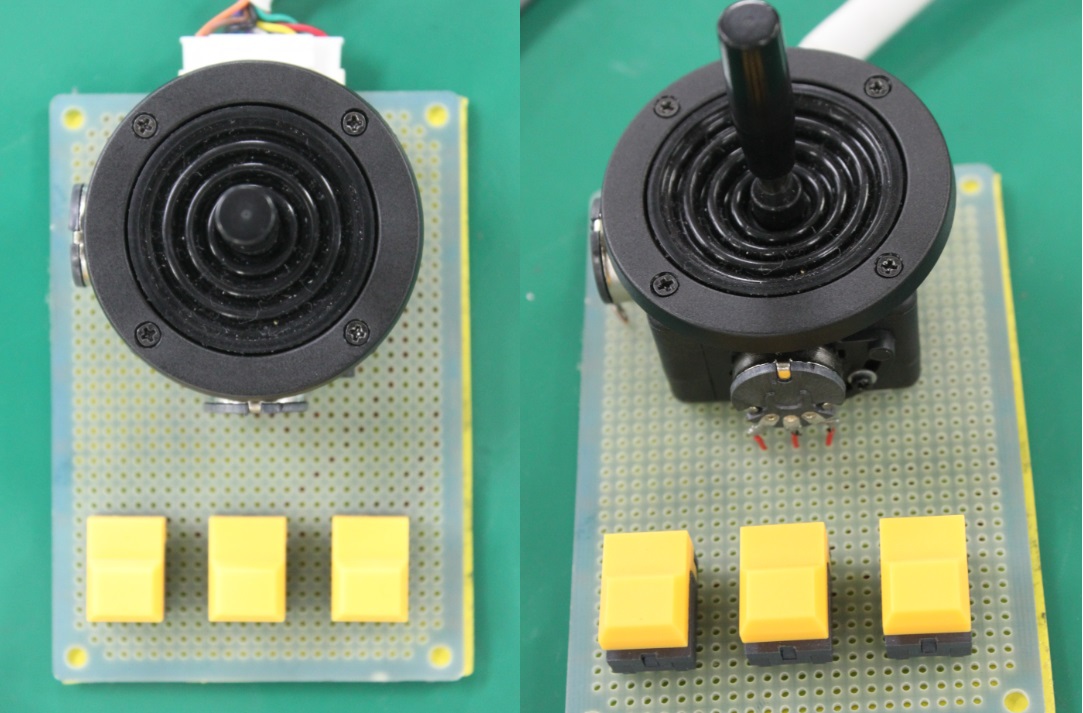
이것이 위에서 찍은 사진입니다.
위 사진에는 스위치가 3개가 연결되어있지만 앞서 말씀드린 것 처럼 스위치는 맨 왼쪽 1개만 사용합니다.
다음은 뒷모습을 찍은 사진입니다.
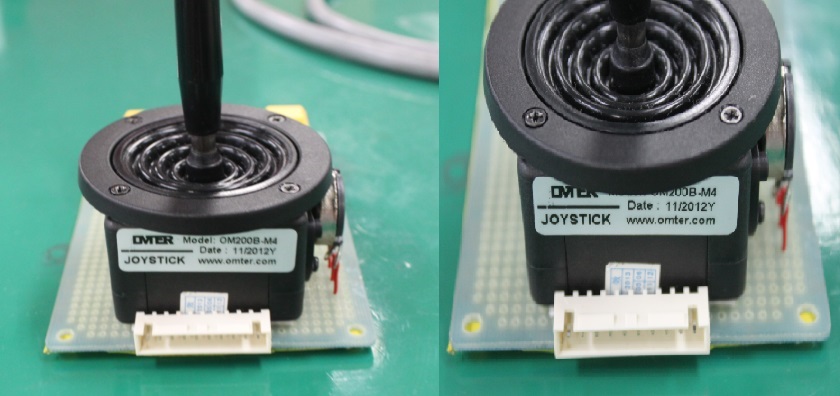
그림과 같이 커넥터를 연결해 주었습니다.
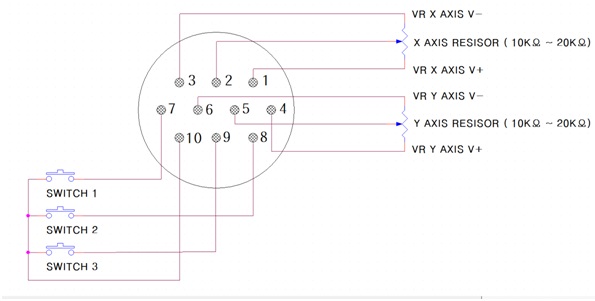
회로도는 다음과 같습니다.
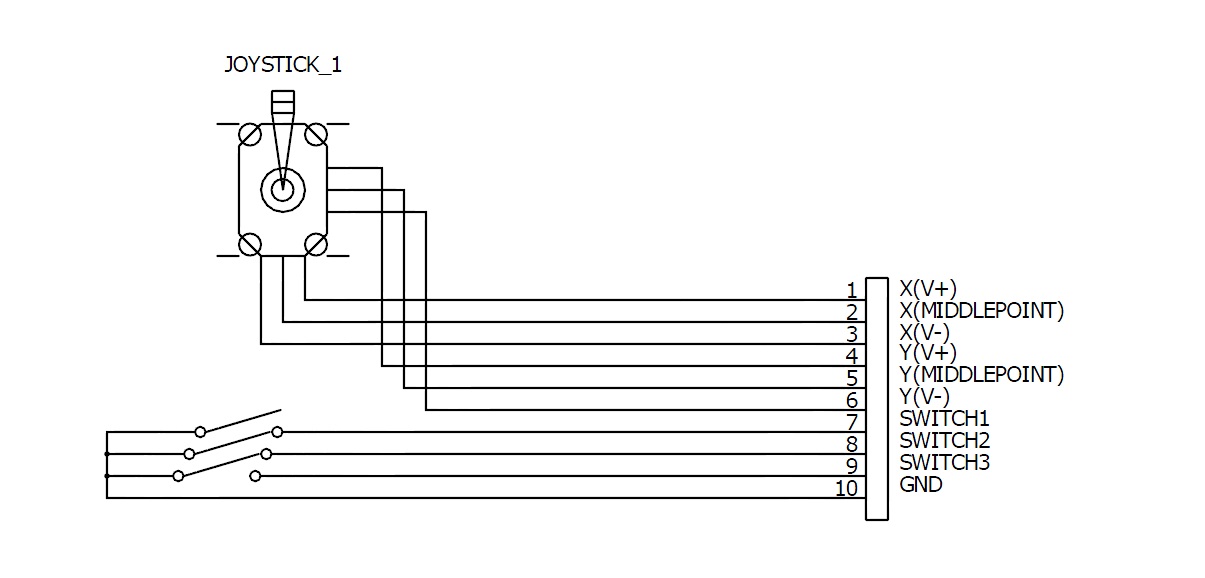
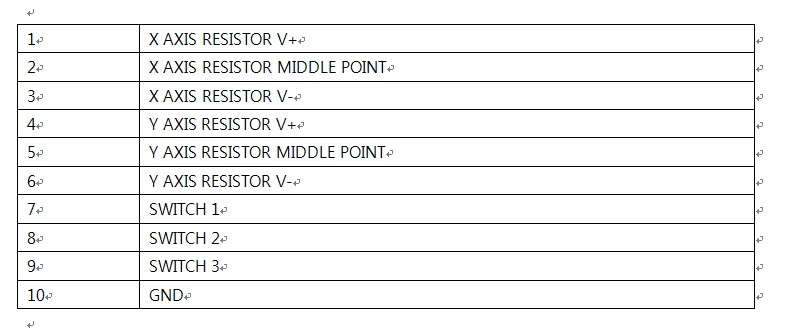
조이스틱과 스위치, 커넥터의 연결은 아래에 나와있는 핀 배치도를 보시고 연결하시면 됩니다.
케이블역시 아래 사진처럼 커넥터와 연결을 해주고
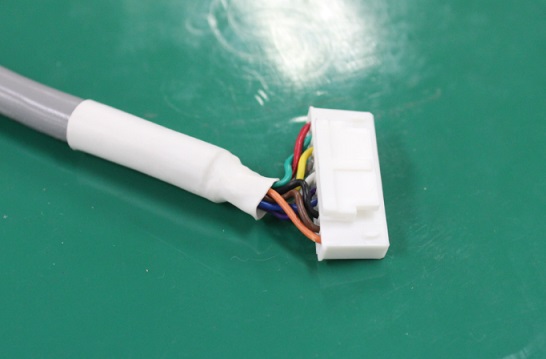
반대편은 Platform의 단자와 연동되는 커넥터(SCC-16-10P)를
사용하여 연결해주면 아래와 같은 최종모습이 완성됩니다.
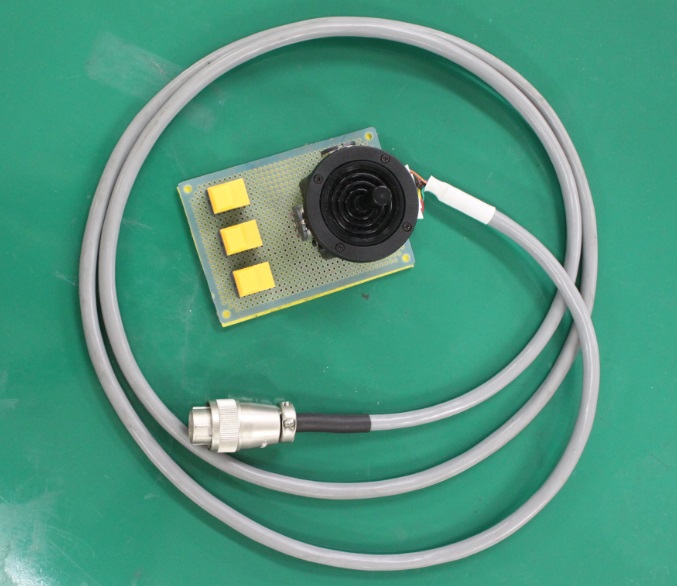
이것이 연결을 완료한 모습입니다.
이제 이 조이스틱을 Mecanum Platform에 연결해 보도록 하겠습니다.

위 사진처럼 홈에 맞추어 연결해주고 전원을 켭니다.
전원을 켜고 MODE 스위치를 길게(2초 이상) 눌러 유선 조이스틱 입력 모드와
RC 조종기 입력 모드를 전환할 수 있습니다.
조이스틱 모드로 설정하면 위 사진의 첫번째 사진과 같은 화면이 나오는데 이는 입력 모드 전환 시 입력된
조이스틱의 X축 Y축 CENTER 값을 체크 하는 것입니다.
CENTER값 체크가 완료되면 두번째 사진과 같이 연결이 완료됐다는 화면이 잠시 나타났다가 사라지고,
아래와 같은 화면이 나타납니다.

처음 연결시 Normal Driving이라는 문구가 나타나는데 Mecanum Mode로 변경하고 싶다면 앞서
조이스틱보드에 만들어둔 스위치를 눌러주면 Mode변경이 됩니다.
연결이 완료되었으니 동작이 되는지 테스트를 해보겠습니다.
테스트모습은 아래 동영상으로 첨부하겠습니다.
NT-Terminal v1.0을 이용하여 NT-ARSv1동작확인하기
안녕하세요
오늘은 저희의 터미널명령입력기NT-Terminal v1.0)를 사용하여 각도센서 NT-ARSv1의 데이터값을 받아보도록 하겠습니다.
먼저 RS232통신을 위해 NT-ARSv1를 컴퓨터와 아래와 같이 연결해줍니다.
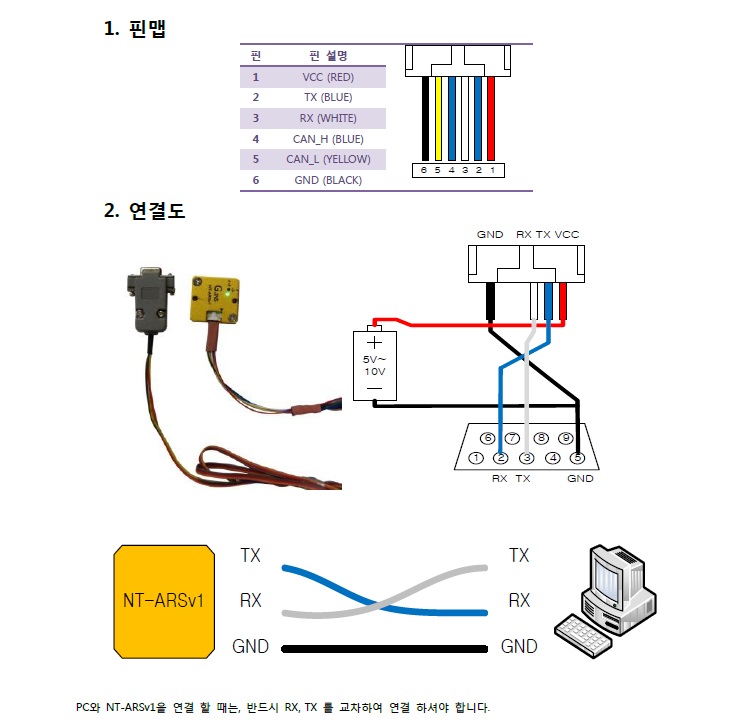
(※자세한 연결 방법 및 정보는 메뉴얼을 참고하도록 합니다)
메뉴얼에 나와있는 핀맵을 보고 컴퓨터와 연결을 해주었다면
다음으로 필요한 NT-PortCheker를 다운받아 설치해주시기 바랍니다
프로그램 다운로드 후 설치를 완료하였으면 이제 동작을 확인해보도록하겠습니다.
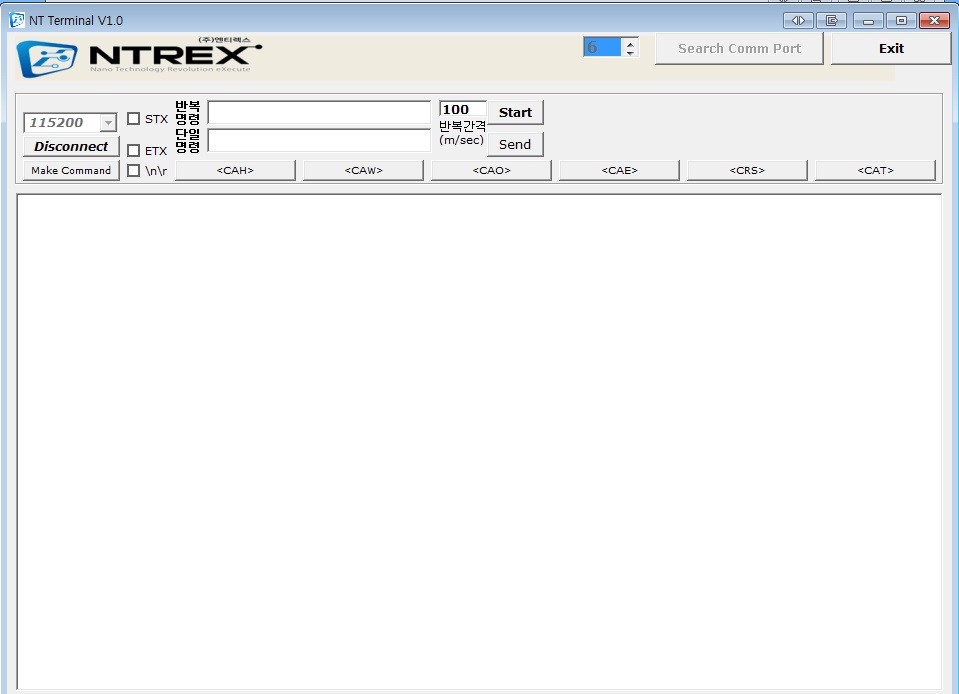
먼저 NT-Terminal v1.0를 실행시키고 Search Comm Port 버튼으로 연결된 포트를 찾습니다.
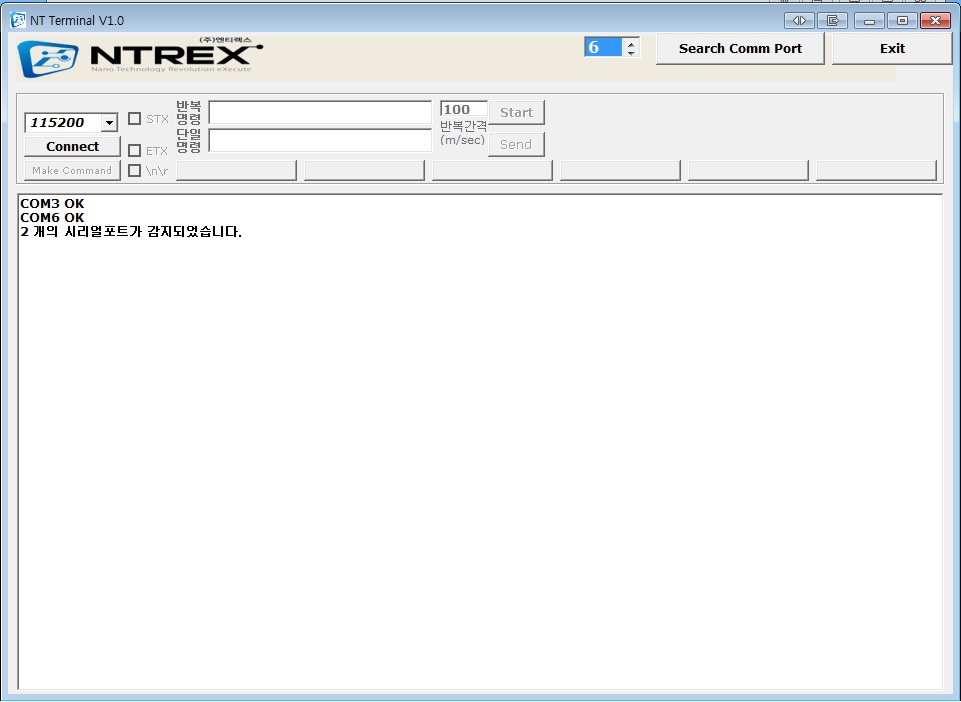
저 같은 경우에는 NT-ARSv1이 포트6에 연결되어 있습니다.
NT-ARSv1은 초기 통신속도값이 115200bps로 설정되어있으므로 통신 속도값을 맞춰준 후 Connect버튼을 눌러 연결을 시켜줍니다.
그다음 동작에 필요한 명령어들을 make Command 버튼을 이용하여 아래와 같이 간단하게 단축키로 지정해줍니다.
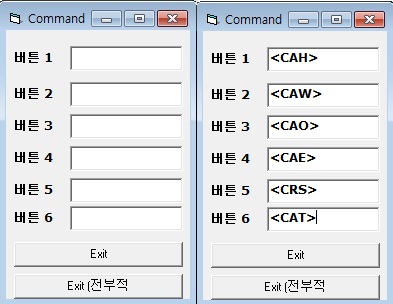
※위에 사용된 명령어를 간단하게 정리하자면
<CAH> = RS232모드 데이터 출력 시작 ,출력값 = (Roll, Pitch, Rated Roll, Rated pitch)STRING
<CAW>= RS232모드 데이터 출력 시작 ,출력값 = (Roll, Pitch, Rated Roll, Rated pitch)STRING
<CAO> = 데이터 한번 출력 , 출력값 = (Roll, Pitch, Rated Roll, Rated pitch)STRING
<CAE> = 데이터 출력 종료
<CRS> = NT-ARSv1 리셋
<CAT> = NT-ARSv1 내부온도, 출력값 = Ex) CAT25.94
단축키 지정 후 전부 적용을 눌러 단축키 세팅을 완료합니다.
단축키 세팅까지 완료하였으면 이제 본격적으로 동작을 시켜보겠습니다.
먼저 단일명령 입력란을 한번 클릭한후 미리 지정해둔 <CRS>단축버튼을 눌러 프로그램 리셋을 시켜줍니다.
그러면 아래와 같은 시작화면이 나타납니다.
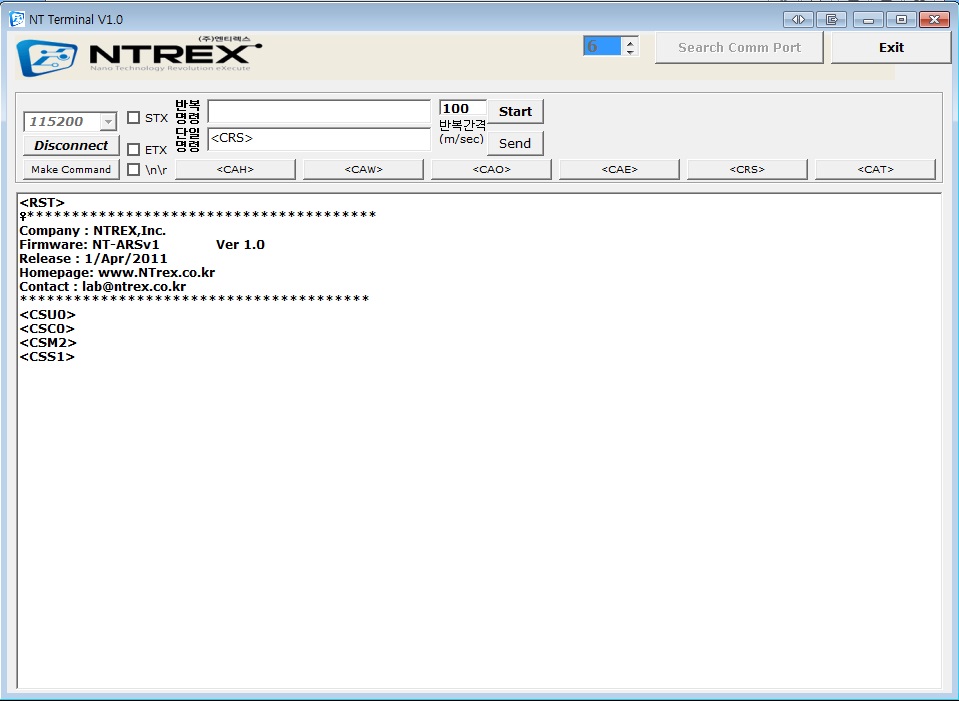
이 화면이 나타났다면 NT-ARSv1과 컴퓨터가 정상적으로 연결이 된 것 입니다.
다음은 데이터값을 받아보겠습니다.
<CAH>버튼을 눌러 데이터 출력을 시켜보면
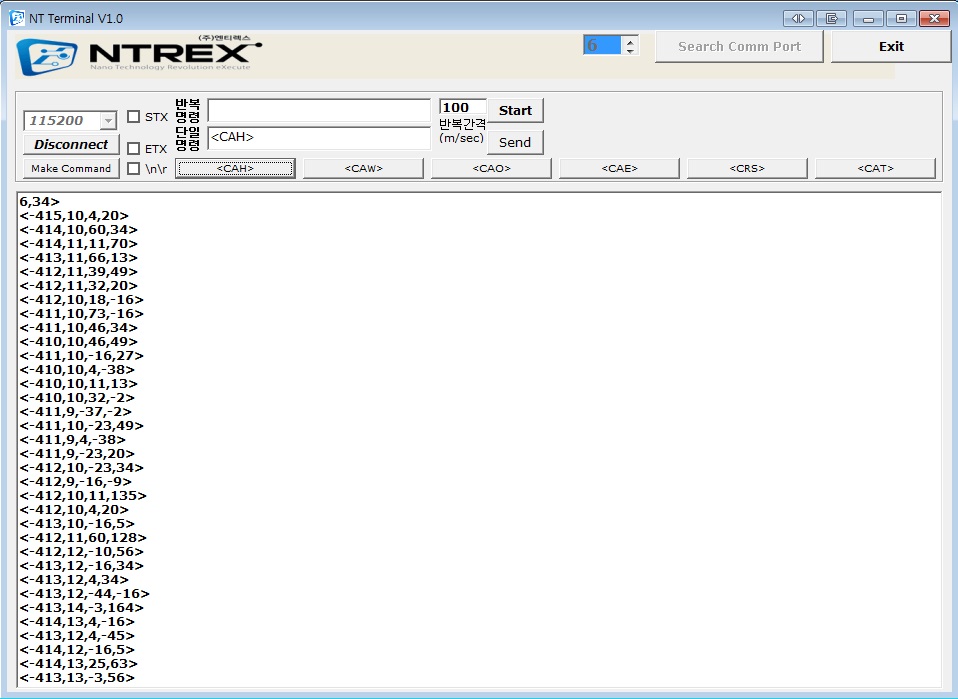
아래와 같이 데이터 값이 잘 출력됩니다.
NT-ARSv1을 X,Y축으로 움직여 가며 제대로 된 데이터 값이 나오는지 확인해봅니다.
확인 후 <CAE>버튼을 눌러 출력을 종료시켜줍니다.
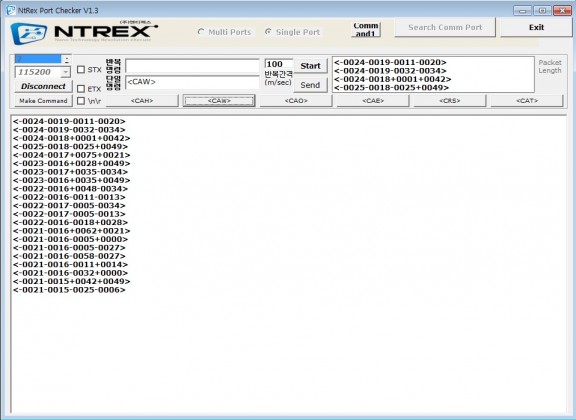
다음은 <CAW>버튼을 눌러 데이터 출력을 확인해봅니다.
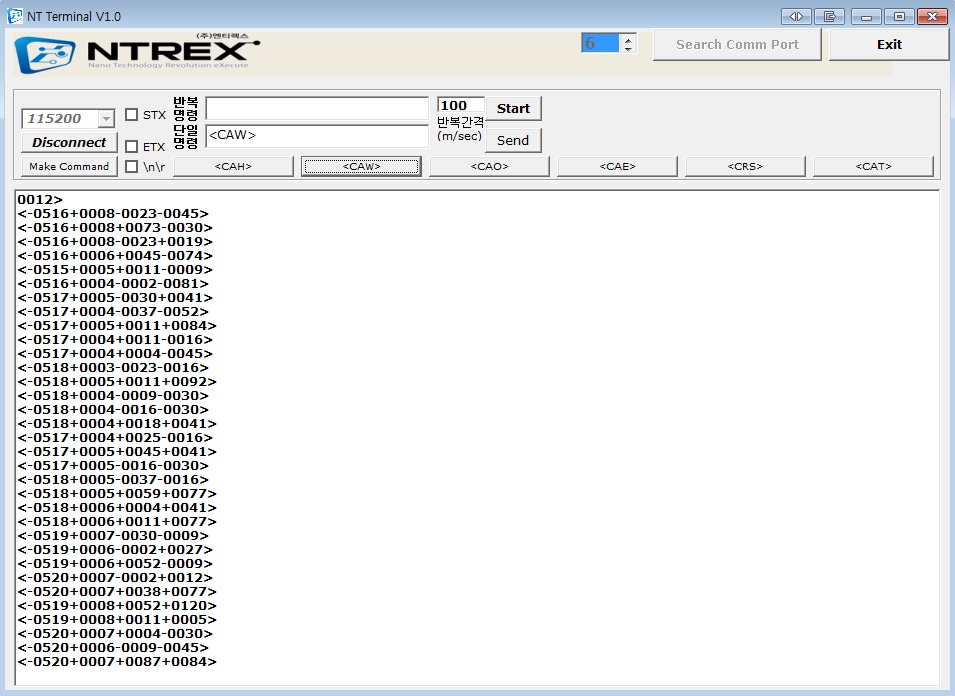
위와 같은 출력이 나타나는지 확인하고 마찬가지로 NT-ARSv1을 X,Y축으로 움직여가며 데이터 값을 확인해준 뒤 <CAE>버튼으로 출력을 종료시켜 줍니다.
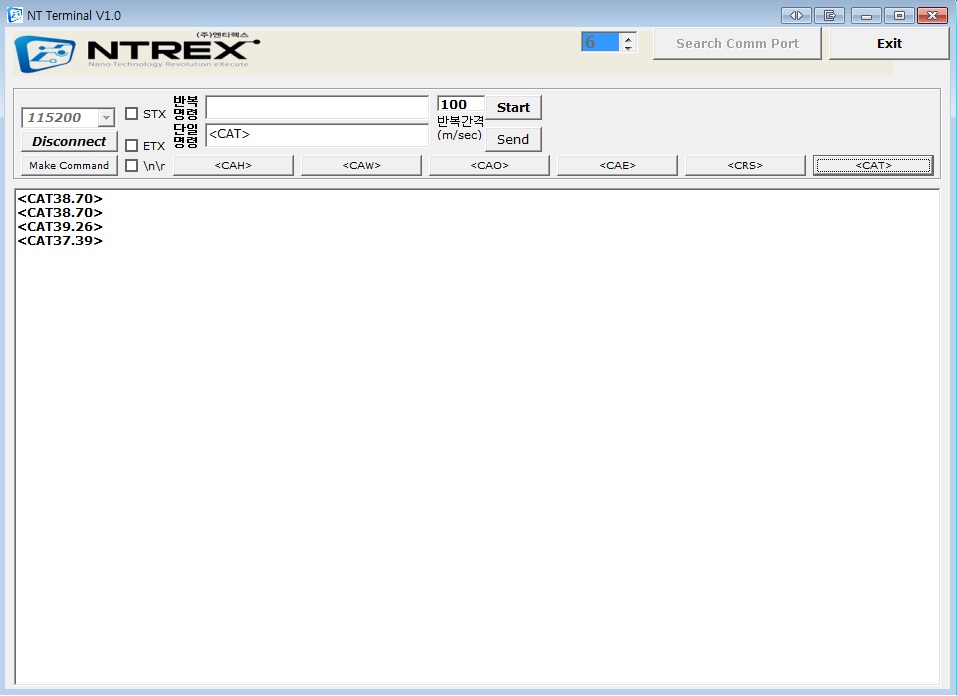
마찬가지방법으로 <CAO>,<CAT>의 동작도 확인해 줍니다.
<CAT>의경우 NT-ARSv1의 내부온도가 아래와 같이 출력되어 나옵니다.
모든 출력을 확인하고 출력종료를 시켜주었다면 Disconnect버튼을 눌러 포트연결을 종료해줍니다.
이와 같이 NT-Terminal v1.0을 이용하여 NT-ARSv1을 구동 시키면 간단하고 손쉽게 데이터출력 값을 확인 할 수 있고 이상유무도 확인 할 수 있습니다.
간단한 터미널명령입력기 NT-Terminal v1.0
안녕하세요. 오늘은 간단하게 터미널명령을 입력할수 있는 프로그램을 소개해드릴려고 합니다.
바로 NT-Terminal v1.0 인데요 자동포트감지 및 반복명령,단일명령을 모두 손쉽게 실행 할 수 있는 프로그램입니다.
먼저 아래 첨부파일을 클릭하여 다운받아주시기 바랍니다.
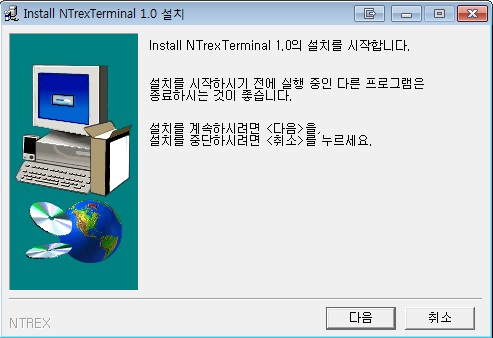
먼저 위 첨부파일을 다운받고 실행을시켜준 다음 아래 사진을 참고하여 설치를 해 주세요.
{kind=link}
맨처음 파일 실행시 위와 같은 화면이 나옵니다 . 설치를 위해 <다음> 버튼을 클릭해주세요.
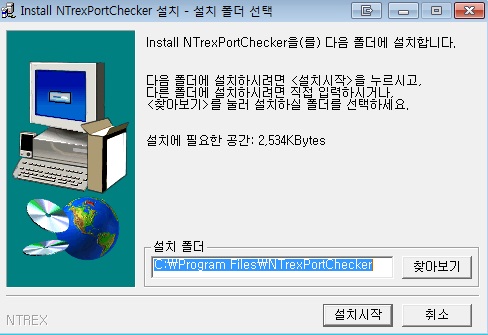
다음은 설치폴더를 지정해주는 화면이 나옵니다. 파일이 설치될 폴더를 선택후 설치시작 버튼을 눌러주세요.
프로그램설치는 대략 10초 안되는 사이에 금방 됩니다. 설치가 완료됬으면 프로그램실행을 위해 확인을 눌러주세요.
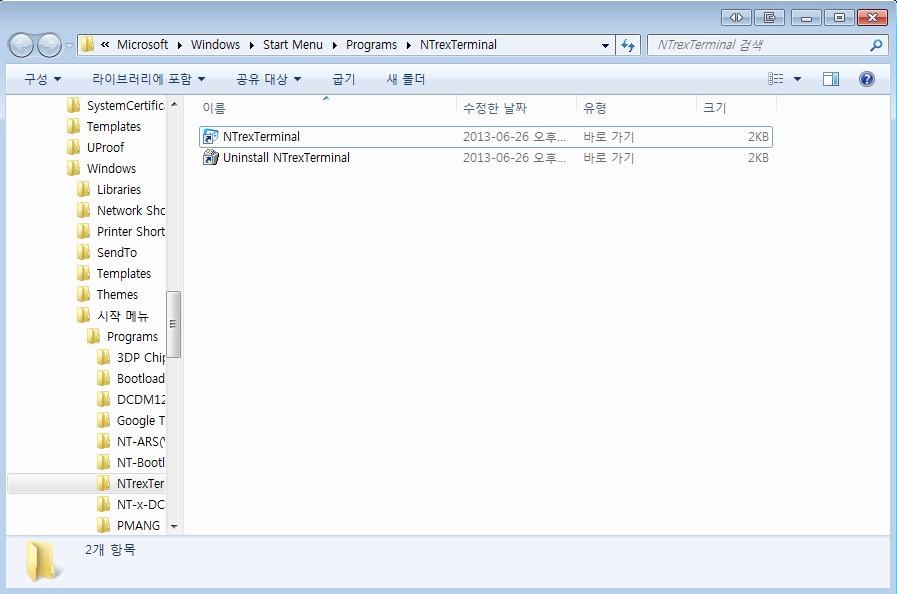
그럼 위 그림과 같이 NT-Terminal v1.0 파일이 설치된 폴더가 열립니다.
여기서 NTrexTerminal 이라써져있는 파일을 실행시켜 줍니다.
(추후 실행시에는 시작메뉴에 아이콘이 생성되있으므로 시작메뉴에서 실행을 시켜주면 됩니다.)
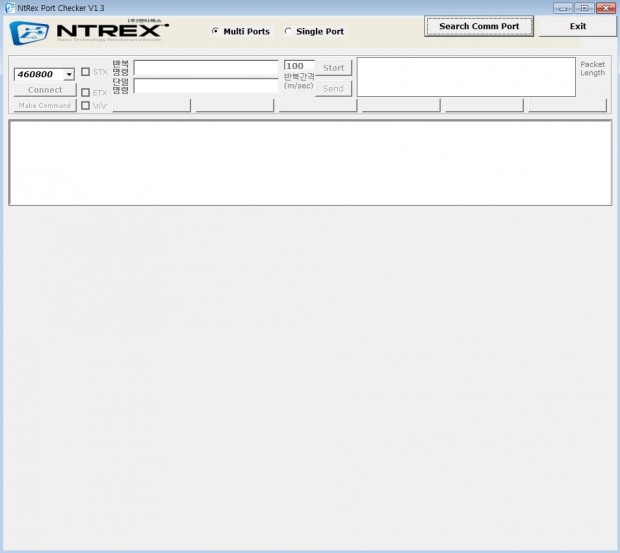
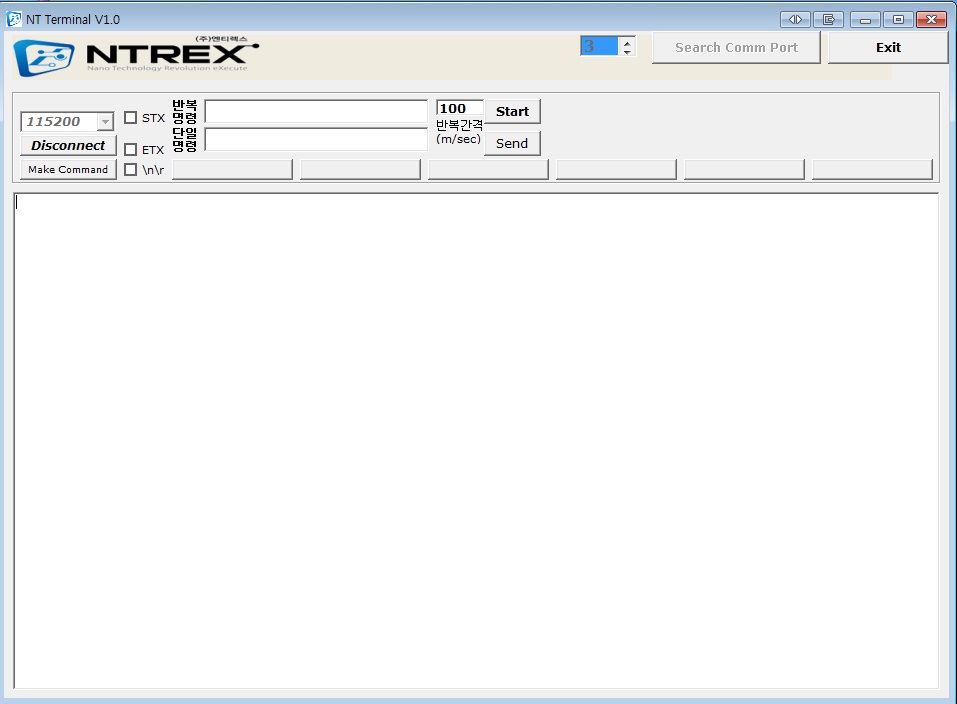
프로그램 인터페이스는 위사진과 같습니다.
맨위의 Search Comm Port버튼을 누르면
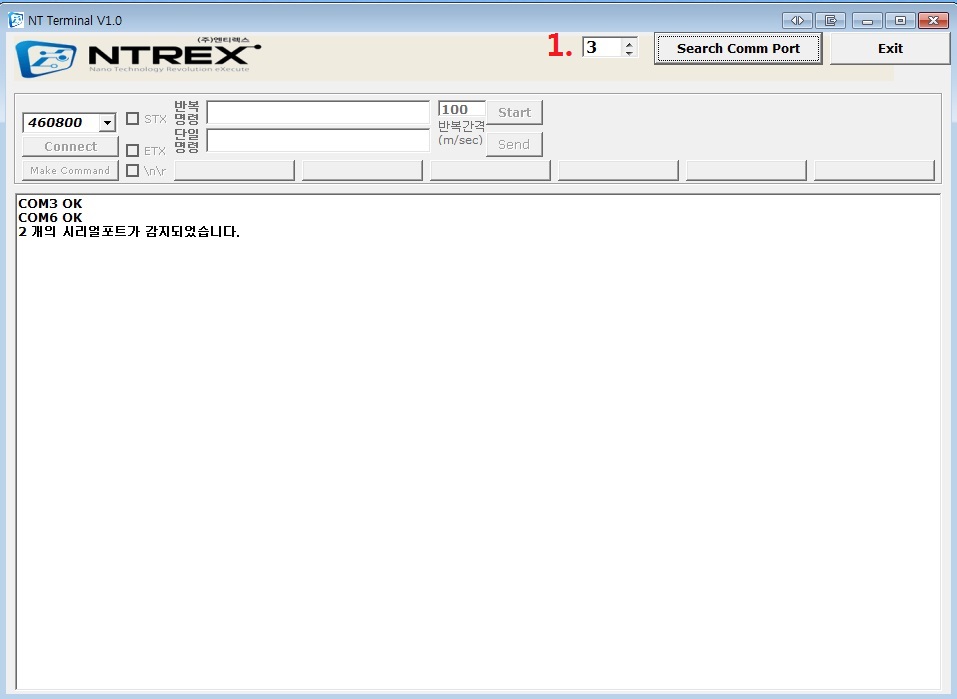
위와 같이 자동으로, 연결되어있는 모든 포트를 감지하여 나타내줍니다.
만약 여러개의 포트가 연결되어있는경우 위의사진에 나와있는 1번부분 박스에서 스크롤을내리면 원하는 포트를 선택할 수 있습니다.
원하는 포트선택후 포트번호를 클릭하면 아래와 같이 Connect버튼이 활성화 됩니다.
그다음 사진에 표시된 1번부분에서 스크롤을 내려 통신속도를 설정하고
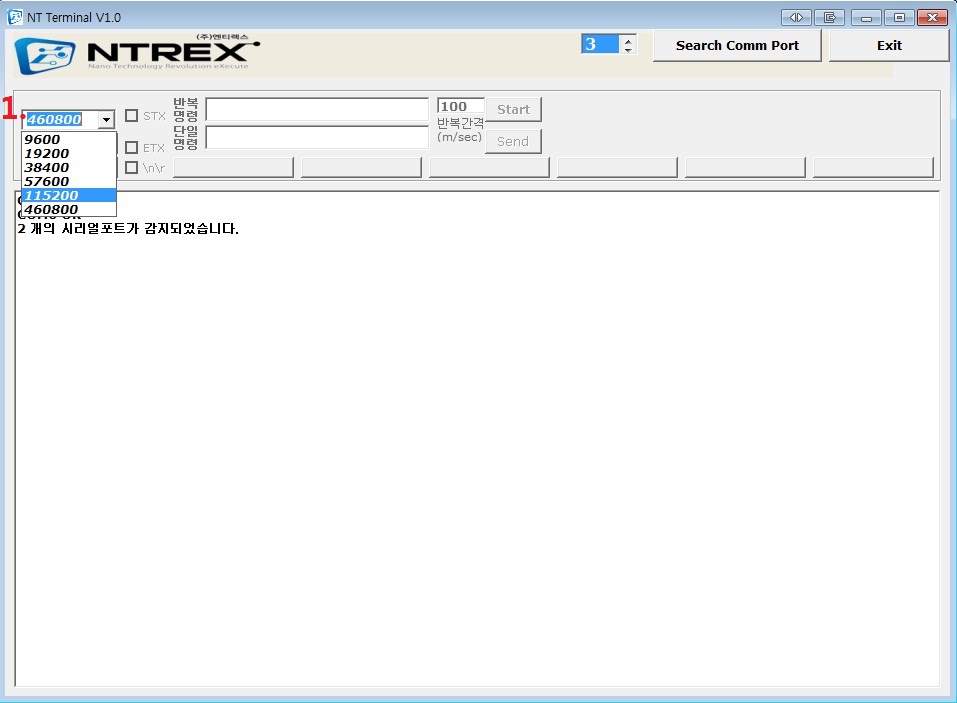
Connect버튼을 누르 면 아해 사진처럼 포트와 연결이 됩니다.
(※포트를 Connect시켜야 비활성화 되있는 버튼들이 아래 사진처럼 활성화가 됩니다.)
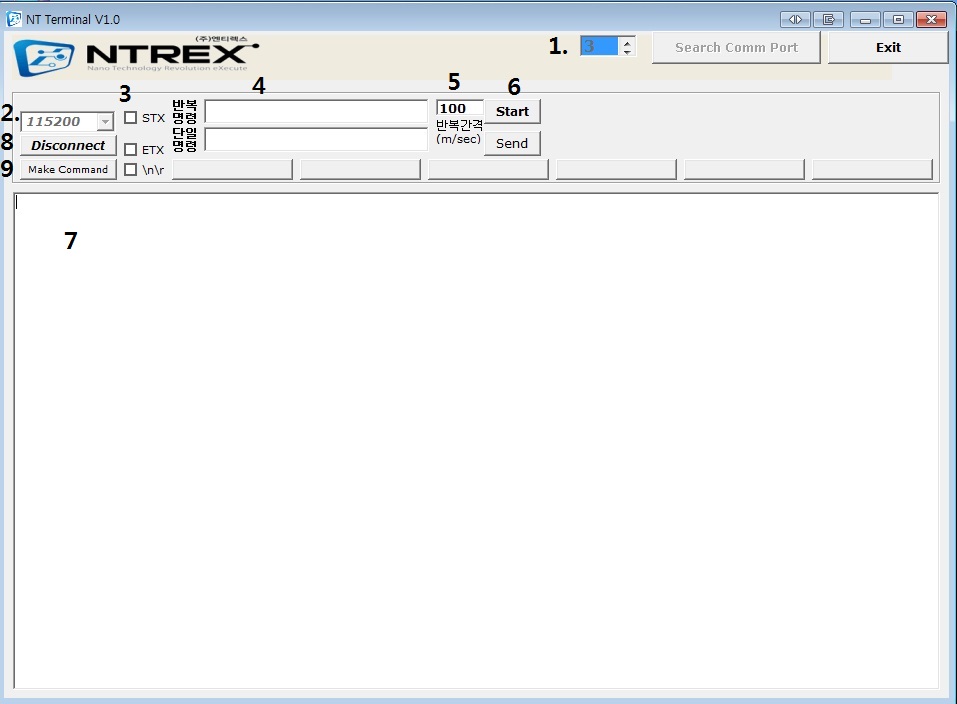
여기서 그림에 나와있는 번호를 참고하여 인터페이스에 대해 간략히 설명해드리겠습니다.
먼저 1번은 연결할 수 있는 포트번호를 나타내줍니다.
2번은 통신속도를 설정하는 부분입니다. 속도는 9600, 19200, 38400, 57600, 115200, 460800bps 으로 설정가능합니다.
3번은 아스키 코드인 STX(HEX값 = 0×02),ETX(HEX값 = 0×03) 를 자동으로 입력하여 주는 역할을 합니다. 체크박스로 설정이 가능합니다.
4번은 터미널명령 입력란 으로 반복명령과 단일명령(ASCII값)을 설정할수 있습니다.
반복 명령 입력시 명령어입력후 5번부분인 반복간격을 (단위 : ms)설정한 후 Start버튼을 누르면 설정된 간격마다 명령을 전달해줍니다.
반복 명령 입력 후 START버튼(그림6번)을 누르면 명령이 실행됩니다.
{kind=link}
단일 명령 입력시 명령어 입력 후 SEND(그림6번)버튼을 누르면 명령이 한번 전달됩니다.
7번창은 출력데이터 및 메세지 표시 창이고,
8번은 통신속도 설정 후 포트와 연결(Connect)또는 해제(Disconnect)을 시켜주는 버튼입니다.
9번은 단축버튼을 설정할 수 있는 창으로 Make Command 버튼을 누르면 아래와같은 단축버튼입력창이 나옵니다 .
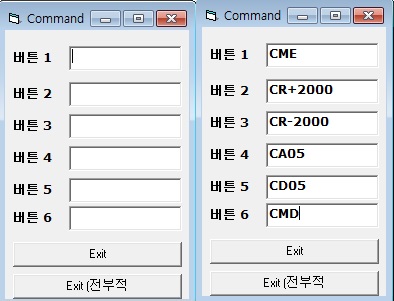
빈칸에 설정할 명령어를 입력하고 Exit[전부적용]을 누르면 아래와 같이 단축버튼이 설정되어
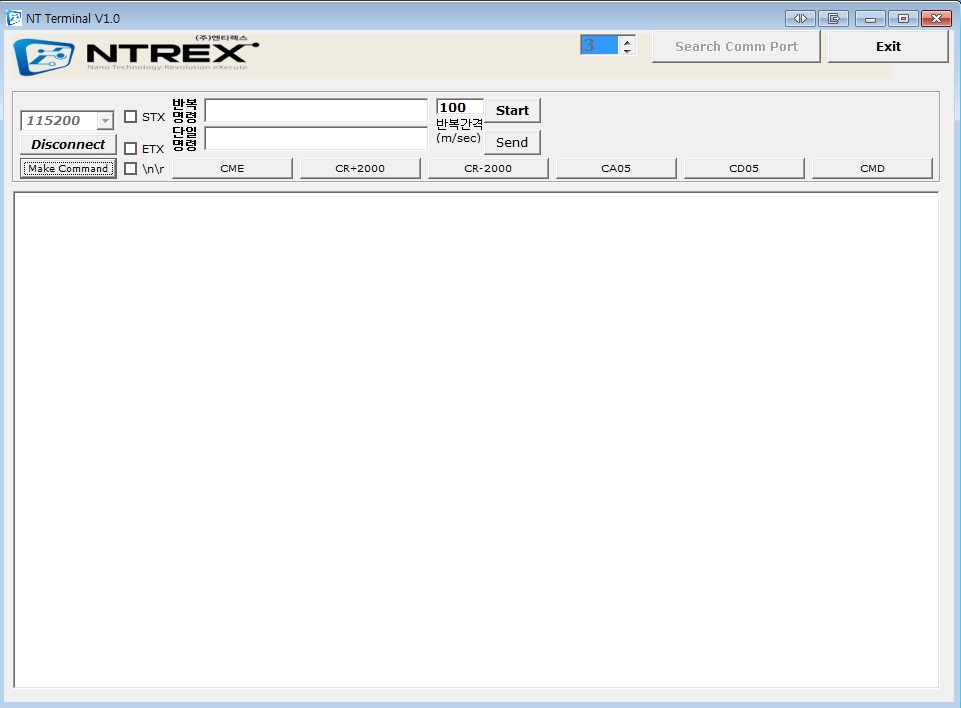
버튼클릭후 START버튼 클릭시 자동으로 반복명령이 실행됩니다.
명령 실행후 정지를 원한다면 STOP버튼을 누르시면 됩니다.
프로그램 종료를 원하실땐 EXIT버튼을 눌러주시기 바랍니다 . 종료 전에는 꼭 ! 명령을 STOP을 시켰는지 확인후 종료해 주시기 바랍니다.
기존터미널로는 반복명령을 수동으로 반복해서 입력해줘야하는 단점이 있었지만, NT-Terminal v1.0으로 한번에 해결할 수 있는점이 이 프로그램의 최대 장점입니다.
그러므로 주기적으로 명령이 필요한 모터드라이버 또는 다른 하드웨어에 사용하면 더욱 유용한 프로그램이 될 것 입니다.
고객의 니즈까지 탑재한 스마트한 로봇 세상, 기술력으로 완성하다 – ㈜엔티렉스 로봇연구소 양광웅 수석연구원
고객의 니즈까지 탑재한 스마트한 로봇 세상, 기술력으로 완성하다
㈜엔티렉스 로봇연구소 양광웅 수석연구원
1495년 레오나르도 다빈치가 최초의 인간형 로봇을 디자인한 이래 로봇의 역사는 상상을 뛰어넘을 만큼 진화했다.
사람 한 명 없이 로봇만으로 생산라인을 가동하는 기업이 있는가 하면, 외과의사를 대신해 로봇이 큰 수술을 도맡기도 한다.
심지어는 사람에 버금가는 지능과 감성을 탑재한 로봇까지 등장했다.
우리나라의 경우 선진국에 비해 다소 늦게 로봇산업의 바통을 이어받았지만 추격 속도가 놀라울 정도로 빠르다. (주)엔티렉스(대표이사 오상혁)는 그 대열에서도 단연 눈에 띄는 기업. 2003년 전자·전기부품 전문 온라인 쇼핑몰 ‘디바이스마트’로 창업해 탄탄한 기반을 구축한 이래 2006년 기업의 성장을 도모하고자 로봇연구소를 설립했다. 이전까지 유통 사업에 의존해왔다면 로봇연구소를 통해 로봇이라는 과학적 상상력의 날갯짓을 시작한 것이다. 이는 단순히 디바이스마트의 카테고리 하나를 늘린 데 그치지 않고, 국내 로봇산업의 기대치를 높이는 데도 적잖이 기여했다는 평을 받고 있다. 여기에는 공동과제 수행에 이어 지난해 연말부터 엔티렉스 로봇연구소의 일원으로 호흡을 맞춰온 생기원 로봇융합연구그룹 양광웅 수석연구원의 연구열정도 깊숙이 스며들어 있다.
“유통망을 통해 고객과 직접적인 소통관계를 맺다보니 고객의 니즈 또한 즉각적으로 접하게 됩니다. 이런 상황에서 제품에 대한 고객의 피드백을 적극적으로 수용하고, 이를 반영한 제품으로 업그레이드 하려면 무엇보다 자체적인 연구개발 인력이 시급했죠.”
민형기 소장의 말처럼 연구인력 중심으로 꾸려진 로봇연구소는 이후 제품에 대한 고객의 궁금증 해소는 물론 다양한 로봇을 개발해 제품화했다. 하지만 사실 연구소 설립 초기의 제품은 기초적인 기능 구현에 머문 로봇이 대부분이었다. 이처럼 다소 소극적으로 명맥을 이어오던 로봇연구소가 활기를 띠기 시작한 건 ‛메카넘 휠’에 대한 특허권을 획득하면서부터다.
“전 방향 이동이 가능한 메카넘 힐은 스웨덴에서 처음 개발해 불과 몇 년 전만 해도 세계적인 로봇기업 두 곳이 특허를 양분하고 있었어요. 그러다 국제 지적재산권 분쟁 컨설팅 사업을 수행하던 중 한 기업의 특허가 해제된 사실을 알게 돼 극적으로 특허권을 따낼 수 있었죠.”
출범한지 얼마 되지 않은 자그마한 중소기업이 메카넘 휠 특허권을 획득한 건 국내 로봇산업계를 통틀어 매우 고무적인 일이었을 터. 아
닌 게 아니라 엔티렉스는 국내 유일의 메카넘 휠 솔루션을 주력제품인 주행로봇부터 군사보안용 로봇, 산업용 로봇 등에 적극적으로 활용해 시장으로부터 호평을 받았다.

연구를 해왔다고 해도 과언이 아니에요. 그러다보니 추상적인 연구 활동을 펼치는 오류가 적잖았죠. 그런데 엔티렉스는 유통망과 직결돼 있어 시장의 목소리가 생생하게 들려와요. 덕분에 단지 로봇의 기능뿐만아니라 고객의 니즈까지 탑재해 더욱 만족도 높은 로봇 개발에 한발짝 다가갈 수 있게 되었죠.”
양 수석연구원이 공동과제를 담당한 생기원 담당 연구원에 머물지않고, 지난 12월 아예 엔티렉스 로봇연구소로 파견근무를 나온 것도 같은 맥락에서다. 양 수석까지 연구인력으로 흡수함으로써 총 12명의 브레인으로 뭉친 엔티렉스 로봇연구소는 세계적인 로봇 트렌드에 민감하게 대응하는 한편 현재의 간판제품인 주행로봇이 좀 더 안정적으로 움직이도록 만드는 것을 당면과제로 삼고 있다.
“로봇산업이나 엔티렉스 로봇연구소 모두 전망이 매우 밝다고 생각해요. 둘러보면 미진한 점이 눈에 띄는 것도 사실이지만, 우리만의 경
쟁력도 뚜렷합니다. 가령, 이처럼 다양한 적재중량 주행로봇의 라인업을 갖춘 기업은 우리가 유일하다고 자부합니다.”
무궁무진한 가능성을 잉태한 로봇업계의 기대주로서 실험정신과개척정신으로 무장한 엔티렉스 로봇연구소. 이들의 젊고 열정적인 연
구의지와 양광웅 수석연구원의 노련하고 빈틈없는 기술력이 어우러져 빚어낼 새로운 기능의 로봇이 완성될 날을 기다려본다.
| ㈜엔티렉스(대표이사 오상혁, www.ntrexgo.com)는 2003년 전기·전자부품 전문 디바이스마트 온라인 쇼핑몰로 문을 연 후 2006년 로봇연구소를 설립했다.로봇연구소는 주행 로봇을 비롯해 총 50여 가지의 로봇제품을 개발, 판매 중이다. 국내 유일의 메카넘 휠 특허권을 갖고 있는 로봇연구소는 좀 더 다양한 기능을탑재한 주행로봇 개발에 박차를 가하고 있다. |
출처: 한국 생산 기술연구원 공식 블로그
http://blog.naver.com/kitechblog?Redirect=Log&logNo=60192440347
[뉴스]“㈜엔티렉스 로봇업계 선도하길”

경기신문에 송영길 인천시장의 본사 탐방에 대한 기사가 올라왔습니다. 자세한 내용은 아래 기사 원문을 참고해주시기 바랍니다.
“㈜엔티렉스 로봇업계 선도하길”
송영길 시장, 올 12번째 산업현장 탐방… 기술 고급화 주문
송영길 인천시장이 18일 올해 12번째 산업현장탐방으로 ㈜엔티렉스를 방문, 기업현황 및 애로사항을 듣고 생산현장을 둘러봤다.