[21호]PC와 소통하는 또 하나의 작은 창!LED바 만들기!

컴퓨터는 덥거나 힘들어도 언제나 묵묵히 우리가 원하는 결과를 만들어준다. 성공의 마침표 앞에는 성공의 쉼표가 있어야 한다는 헨리포드의 말을 인용한 침대광고처럼 당신의 컴퓨터도 휴식이 필요할 수도 있다. 컴퓨터가 너무 과열되었다면? 잠시 대기모드로 전환해 주도록 하자. 컴퓨터의 온도는 물론 오늘의 날씨, D-DAY등 다양한 정보를 표시해주는 LED바를 만들어 보았다. 무더웠던 올해 여름 당초에는 서미스터를 이용한 PC온도계를 기획했지만, 기사가 연재될 때면 가을후반기에 들어왔고 컴퓨터 내부에 온도센서를 장착하는 방법이 어려워 PC에 프로그램을 설치하고 LED로 온도를 보여주는 방안을 고민하다 여러 가지 기능이 추가 되게 되었다. LED BAR 부품목록
제작방법
01. 부품목록 : 제작에 필요한 부품들과 공구이다.
02. 기판절단 : 기판을 알맞은 크기로 자른다.(2층 구조로 만들 예정이라 2장을 준비한다.) FND(표시부)를 미리 올려보고 우측에는 버튼(터치)의 공간을 남겨 크기를 가늠하여 기판을 자른다.
03. FND삽입 : 15-SEGMENT 2DIGIT FND 8개를 삽입한다. 앞으로 부품을 삽입 한 후에는 기판을 뒤집어 납땜하여 부품이 떨어지지 않도록 한다.
04. LED삽입 : 우측에는 버튼 조광용 FLAT LED를 삽입한다. 이 LED는 터치버튼의 조광용으로 사용될 예정이다.
05. 컨버터 삽입 : ATtiny2313A의 UART포트를 이용해 PC와 통신할 예정인데, USB컨버터를 사용하였다. 요즘 PC에는 RS-232C포트(UART에서 MAX232로 변환해주면 RS-232C가 된다)를 찾기 어렵게 되었는데, UART – USB 변환모듈의 값도 상당히 저렴하여 부담이 없고 USB전원도 사용할 수 있어 별도의 어댑터가 필요 없어지므로 USB로 만들게 되었다.
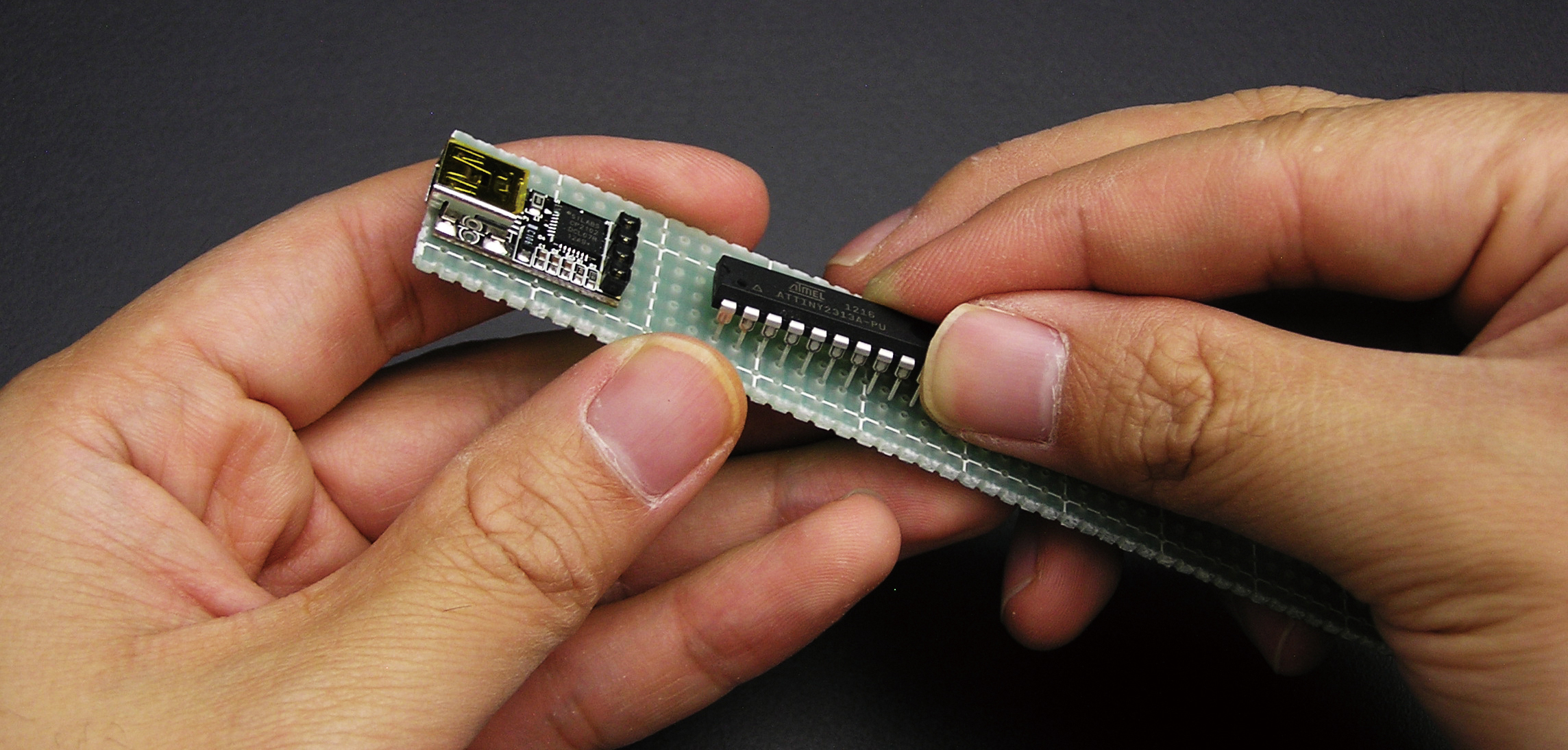
06. IC마이컴삽입 : USB컨버터 근처에 AVR ATtiny2313A를 삽입한다. PC로부터 수신 받은 정보를 분석하여 전면 FND에 표시하고, 터치가 감지되면 이를 PC로 전송한다. PC에서 설정한 정보는 AVR에 저장되고, 프로그램이 재실행 되면 초기 값으로 사용된다.
07. IC트랜지스터 ARRAY 삽입 : 16개의 FND는 1/8 DUTY로 동작하므로 동시에 최대 30개의 공통LED를 제어하므로 트랜지스터로 증폭해야 하는데, 주변소자 없이 간단하게 사용할 수 있는 트랜지스터 어레이를 사용하였다.
08. IC시프레지스터 삽입 : 동시에 최대 30개의 LED와 터치버튼의 LED를 ON/OFF제어해야 하는데 16비트 시프트레지스터를 2개 사용하였다. MBI5026XX를 사용한 중요 이유로는 포트를 확장하는 이유도 있지만 전류제한 기능이 있어 LED에 들어가는 저항의 수를 획기적으로 줄여줌으로 작업이 간편해짐으로 사용하였다.
09. IC터치센서 삽입 : 1개의 버튼으로 몇가지 부가기능을 사용하도록 할 예정인데, 텍트스위치 대신 터치버튼을 이용할 예정이다. 터치버튼에 부착된 가스켓과 가이드를 제거하고 터치IC만을 사용한다. FND나 LED의 높이에 맞추기 위해 억지로 최대한 밀착하고 구부려 놓았다.
10. 저항삽입 : 저항을 삽입한다. MCU측 RESET PULL UP저항(내부풀업이 되어있어 사실 이것도 없애도 된다)과 시프트레지스터 전류제한 저항 두 개 뿐이다. 시프트레지스터에 붙는 저항 하나가 16개 모든 포트의 전류제한을 담당한다.
11. 세라믹콘덴서 삽입 : LED에서 많은 전류를 끌어다 쓰기도 하고 시리얼 데이터를 전송하면서 전원 측에 노이즈가 발생할 수 있으므로 MCU, 시프트레지스터 IC, 터치센서 IC에 세라믹콘덴서를 달아주었다.
12. 전해콘덴서 삽입 : TR ARRAY의 Vs단자와 전원 종단지점에 각각 전해콘덴서를 달아준다.
13A. 배선작업 1 : 모든 소자가 삽입 되었으면 배선작업을 한다. LED에서 많은 전류를 소모하므로 전원단자는 두껍게 배선한다.
13B. 배선작업 2 : 직접 연결이 불가능 한 곳은 점퍼작업을 한다.FND쪽 기판과 IC쪽 기판 모두 배선작업을 마무리한다.
13C. 배선작업 3 : 두 기판을 점퍼로 연결한다.
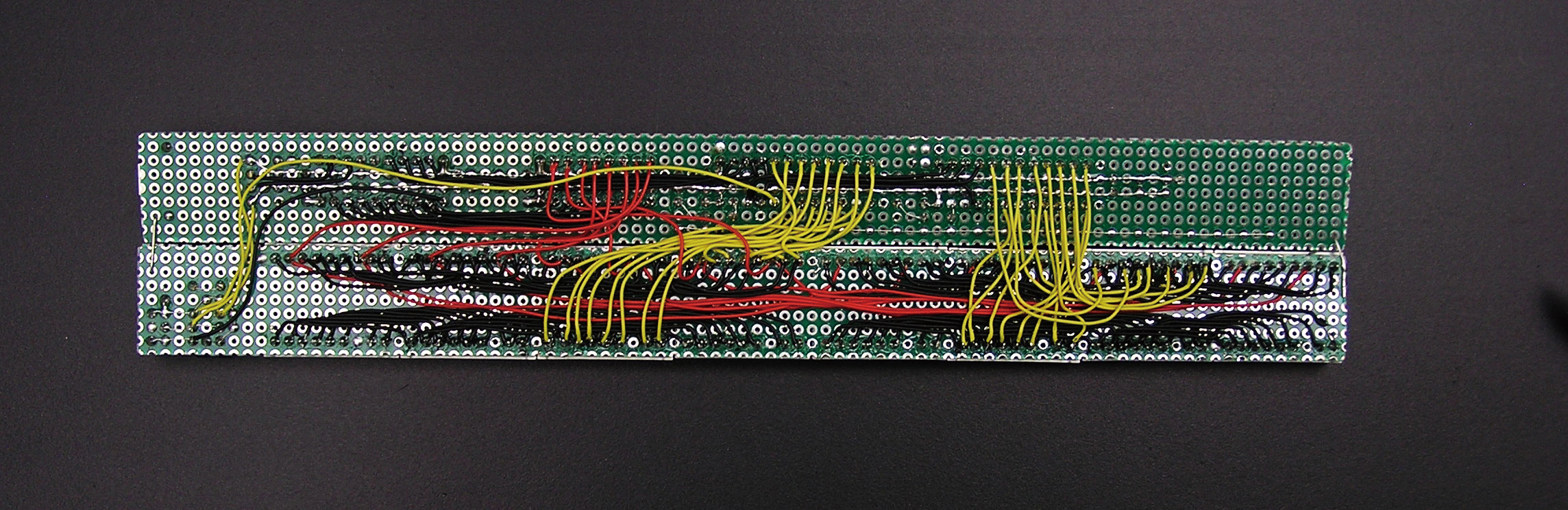
14 기판앞뒷면 : 완성된 기판의 앞면과 뒷면.
15. 결선확인 : 결선이 완료되면 테스터기로 쇼트난 부분이 없는지, IC의 전원 극성은 올바른지 점검한다.
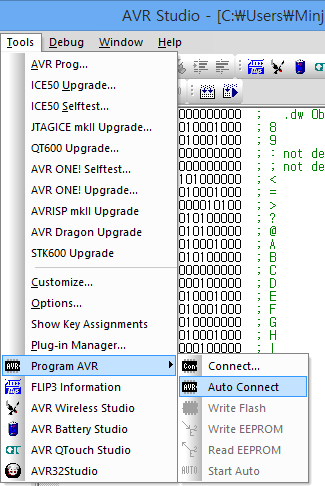
16A . AVR Studio 4.1X버전(Atmel Studio 6.XX 버전을 이용해도 무관하다)을 이용하여 프로그램을 다운로드 할 것이다.
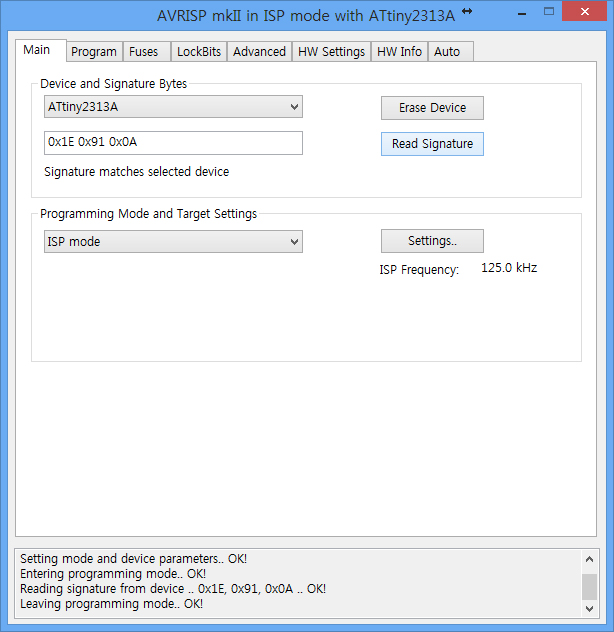
16B. 초기에 표시되는 Main탭에서 Device and Signature byte에서 ATtiny2313A를 선택하고 Read Signature을 눌러 정상적으로 연결되는지 확인한다.
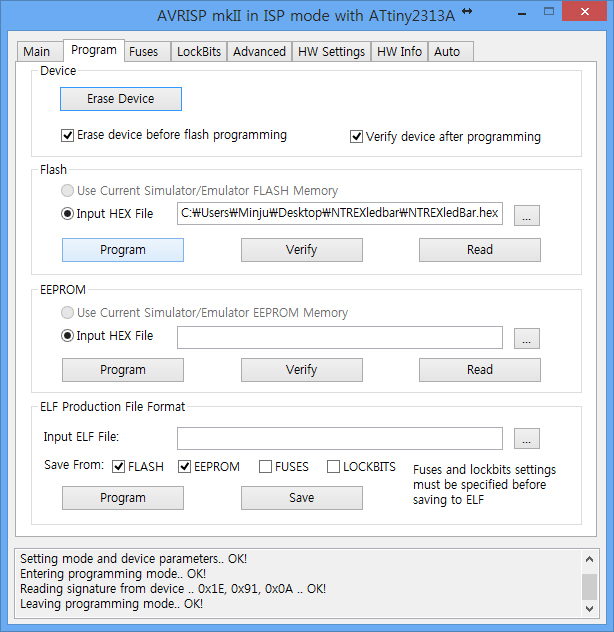
16C . Program 탭으로 이동하고 필자의 홈페이지에서 함께 다운로드한 NTREXledBar.hex의 경로를 지정한 후 Program을 눌러 다운로드한다.
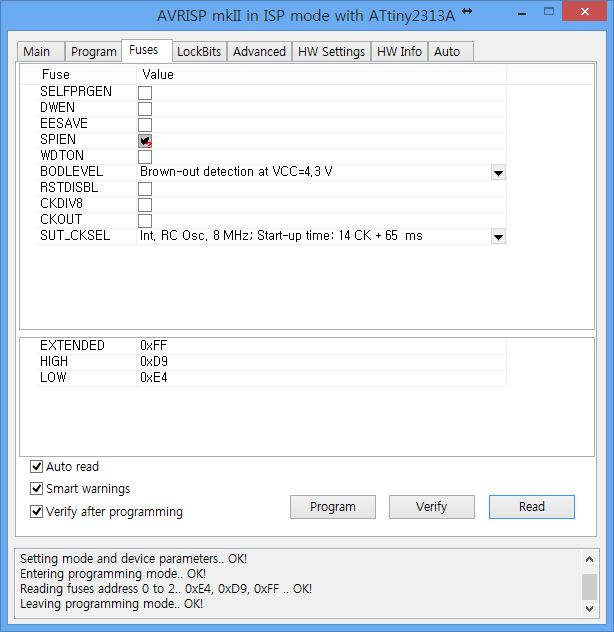
16D. Fuses 탭으로 이동하여 CKDIV8을 해제하고, Int. RC Osc. 8MHz를 선택한다. Brown out detect도 필요할 경우 설정한다.
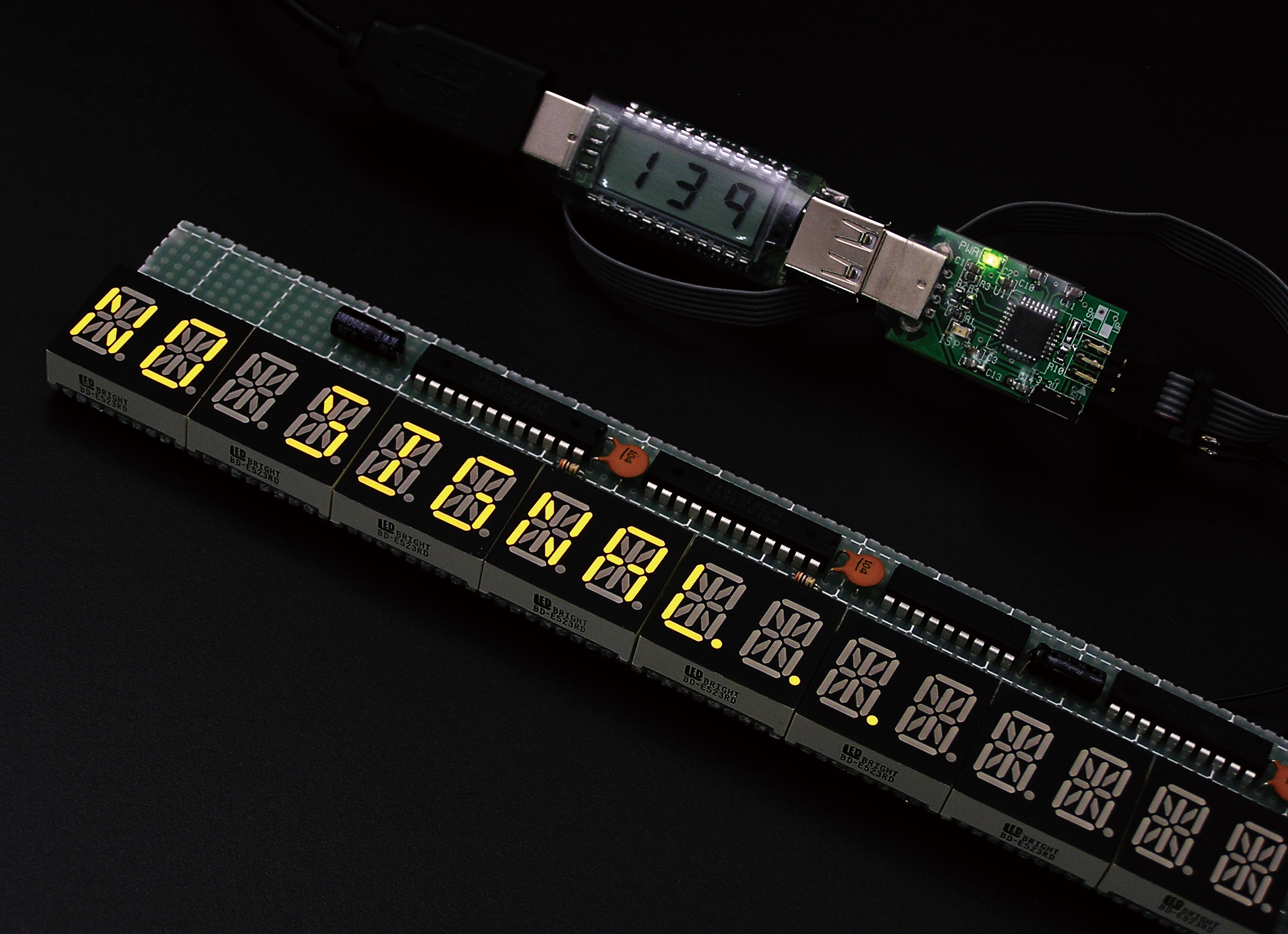
16E. 프로그램 다운로드를 정상적으로 진행하면, ***WELCOME***이 잠시 표시된 후 NO SIGNAL…이 연속적으로 점멸한다. 사진과 같이 USB용 전류계(JCG-1)를 사용하면 만들어진 제품의 소모전류량도 알 수 있다.
17. 기판조립 1 : 모두 마무리 되었으면 2장의 기판 납땜 면을 서로 마주보게 하여 겹쳐준다.
17A. 기판조립2 : 나사나 별도의 서포터를 사용할 공간이 없기 때문에 두 번째 사진처럼 저항 다리 남는 것을 이용해 기판을 고정해주어야 한다.
18. LED종이 : 터치버튼 조광용 FLAT LED에 부착할 필름을 인쇄하여 오려낸 후 LED에 부착한다.
19. 케이스제작 : 케이스는 가공이 쉬운 포맥스를 잘랐고, 전면은 아크릴칼을 이용해 스모그 아크릴을 잘라 사용하였다.
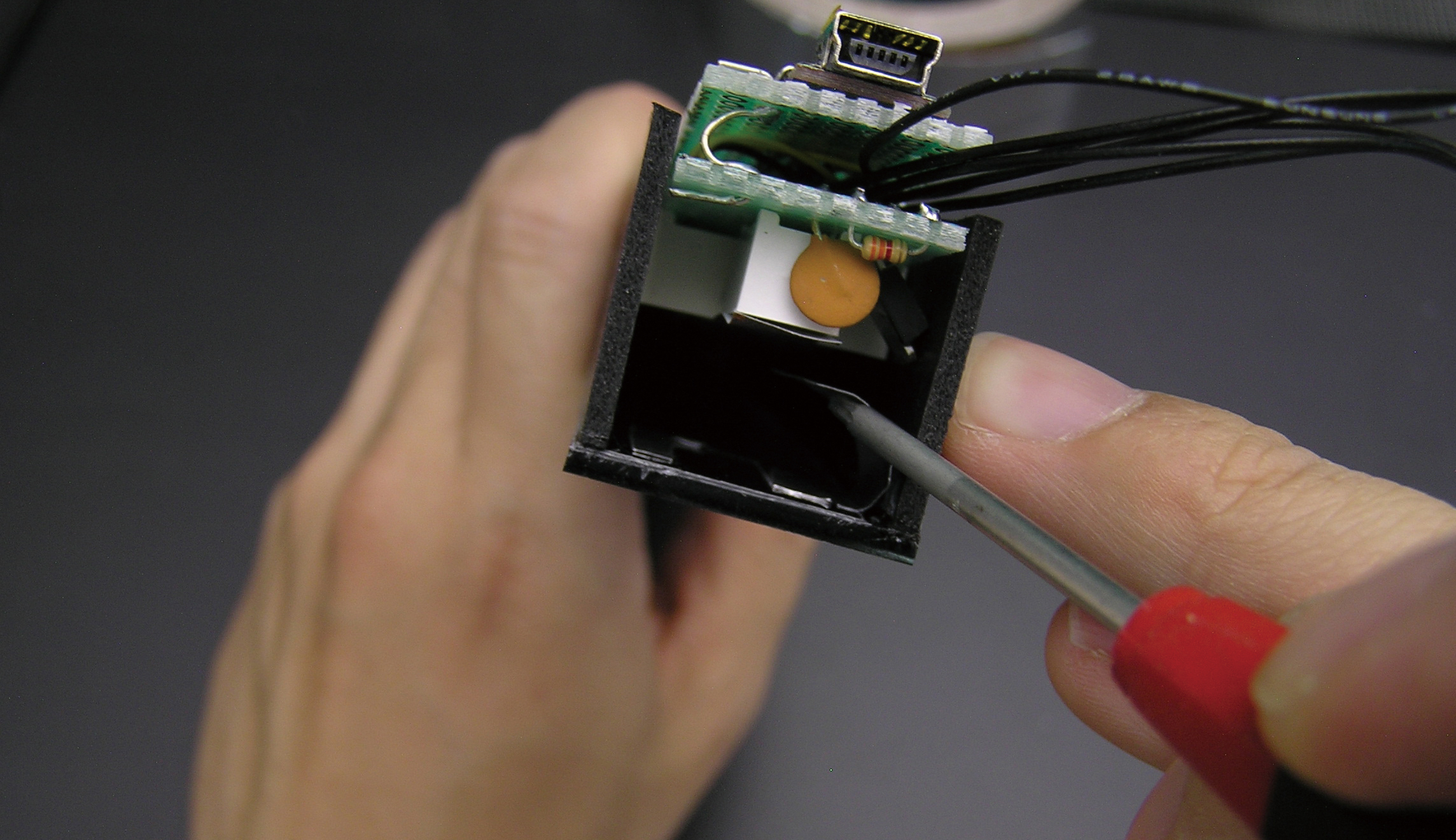
20A. 알미늄테이핑 1 : 알루미늄테이프를 디귿(ㄷ) 또는 할 수 있다면 미음(ㅁ)자 모양으로 잘라 아크릴 터치부분에 안쪽에 부착한다.
20A. 알미늄테이핑 2 : 조립할 때 이 알루미늄테이프와 터치IC 방열패드 부분(방열을 위해 존재하는 것은 아니다.)이 붙도록 한다. 만약 거리가 생겨 붙지가 않는다면 알루미늄테이프로 서로 이어주면 된다.
21. 완성 : 조립이 완료된 모습.
22A. 레일테이프부착 1 : 케이스 외부에 레일 테이프를 부착한다. 레일테이프의 역할은 부직포 개념으로 생각하면 되는데, 결합 분리가 슬라이드 형태로 쉽게 부착했다 떼어낼 수 있다. 원하는 크기로 잘라내어(보통 가로방향으로 절반으로 자르면 적당한 크기인 것 같다.) 포맥스 외부 케이스에 먼저 부착한다.
22B. 레일테이프부착 2 : 모니터 아래에 부착하여 사용할 예정인데, 모니터 아래에는 방금 잘라내고 남은 레일테이프를 사용한다. 처음에는 우측에 붙이려 하였으나, 붙이고 나니 모니터 자체 설정용 터치버튼이 동작하지 않아 왼쪽으로 옮기게 되었다.
23. USB연결 : PC본체에는 USB를 꽂는다. Windows Vista, 7, 8 OS에서는 자동으로 설치되는 것 같고, XP의 경우는 별도로 제공하는 USB Driver를 이용해 수동으로 설치해주어야 한다.
24.모니터에 부착 : 레일테이프는 측면에서 밀어 넣어주어야 결합이 된다. 사진처럼 좌측에서 우측으로 제품을 밀어 고정한다. 최초에는 NO SIGNAL…만 점멸한다. 아까 다운로드 받은 zip파일에서 LED바.exe를 실행한다.
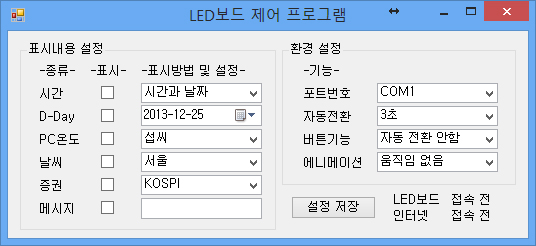
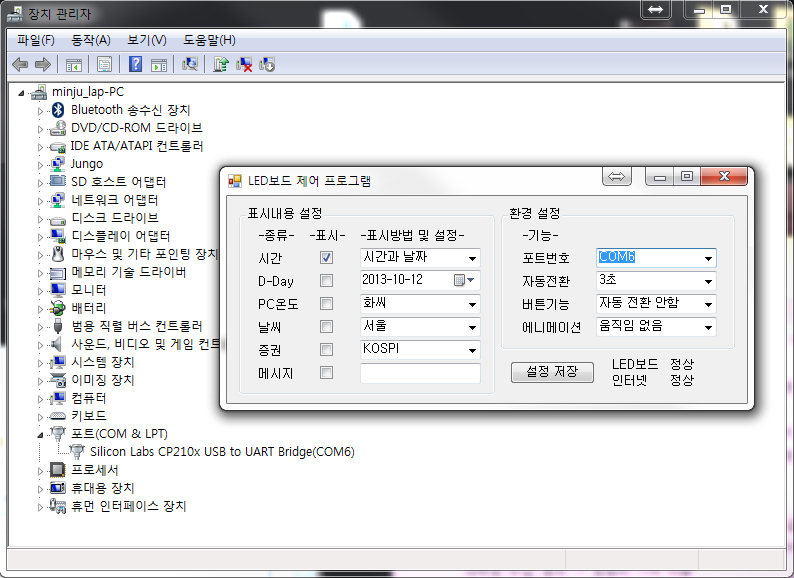
25A.프로그램을 실행한 초기 모습이다.
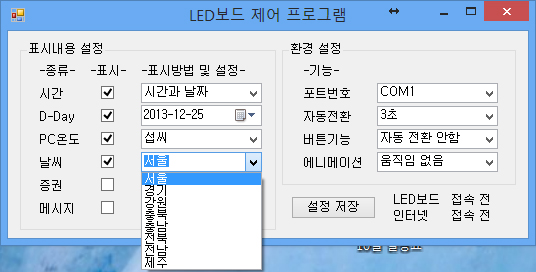
25B. 필요한 기능에 체크 하고 옵션을 변경한다.
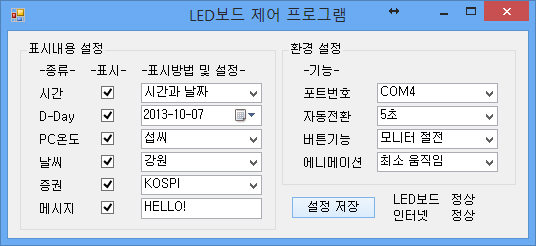
25C. 통신포트를 설정하고(보통 USB 가상 시리얼 포트는 COM 3번 이후로 잡힌다) COM단자를 선택한다. 나머지 옵션을 선택하고 “설정 저장”을 누르면 해당 포트가 활성화 되고 LED바에 정보가 순차적으로 표시될 것이다. 참고로 프로그램은 VB.net 2012에서 작성되고 증권정보와 날씨정보는 온라인 포털사이트에서 JSON형식으로 전송되는데 이것을 웹으로 읽어 파싱한다.
26. 결과물D-DAY : 정상적으로 동작하는 모습. 현재 D-DAY 기능이 표시되고 있고 최대 D-, D+ 999일 까지 표시한다.
27. CCTV모니터 설치 : 컴퓨터는 온라인 시간서버와 시간정보를 연동시킬 수 있고 LED바는 PC에서 시간정보를 얻기 때문에 정확한 시간이 필요한 방송국, 경비실, CCTV통제실 모니터에 부착하여 사용할 수 있다.
28. 온도 표시 : 메인보드에서 실측한 온도를 프로그램이 읽어 LED바에 전송한다. (서버 PC에서 CPU온도를 조회하는 모습.)
29. 사무실 : 여러 가지 모니터에 붙여본 결과 컴퓨터 작업을 하면서도 방해가 되지 않고 미관도 크게 해치지 않았다. 다만 일부 모니터의 경우 하단이 곡선형 디자인으로 되어있어 붙일 수 없는 모니터도 있었다.
30. 터치동작 : 터치버튼이 있어 컴퓨터 프로그램 설정에 따라 단순히 LED화면 전환, 화면 OFF는 물론, PC모니터 끄기, PC절전 상태도 가능하다.
31. 날씨 : 원하는 지역을 선택하면 해당 지역의 날씨도 알 수 있다.
32. 파티션 : 문자 표시기능(영문 최대 128자)이 있고, 최대 표시 가능한 범위인 16자를 넘어가면 자동으로 스크롤한다. 문자 표시기능으로 단순한 이름표부터 인사말도 입력할 수 있다. 부록 1 – 컴퓨터 부팅 시 자동 실행하기
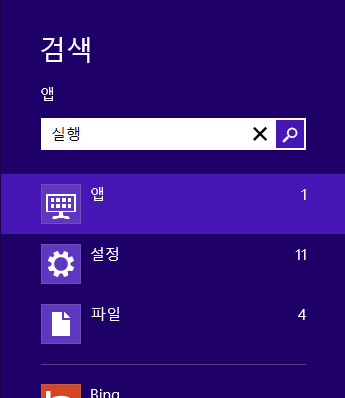
필자의 홈페이지에서 다운로드한 파일 중 LED바.exe라는 프로그램이 있는데, 제품을 구동하기 위해서는 반드시 이 프로그램이 실행되어야 한다.윈도우 키를 누르고 바로 “실행”을 입력한 후 엔터를 누른다(Windows 7에서는 시작버튼을 누르고 검색입력창 클릭).
shell:startup을 입력 후 확인을 누른다.
시작프로그램 창에 LED바.exe를 복사해 넣는다.
복사된 LED바.exe에서 오른쪽 버튼을 눌러 속성에 진입한다.
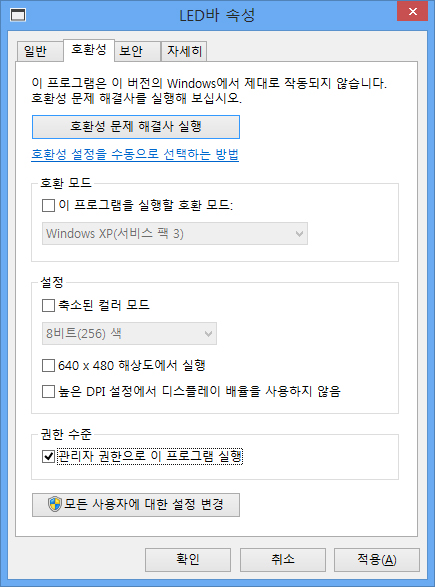
호환성 탭에서 권한수준에 “관리자 권한으로 이 프로그램 실행”을 채크한다. 관리자 권한으로 실행되어야만 PC 온도를 측정할 수 있고 모니터를 끈다던지 특수 기능을 사용할 수 있다. 이제 PC가 재부팅 되더라도 자동으로 실행하여 LED바가 동작할 것이다.
부록 2 – USB드라이버가 자동으로 설치되지 않을 경우 필자는 순정 Windows 8이 설치된 HP컴퓨터 2대와 삼성컴퓨터 1대, DELL노트북 1대에서 테스트했을 때 대부분 USB를 꽂기만 하면 자동으로 USB드라이버가 설치되어 필수사항이 아니라 생각되어 부록으로 집어넣었다. 노트북에서는 USB드라이버가 자동으로 설치되지 않았는데, 수동으로 USB드라이버를 설치하는 방법을 소개한다. 만약 특별한 이유로 NT-USB2UART 대신 MAX232등을 이용하여 RS-232C로 변경한 경우 그냥 COM포트에 연결하면 된다.
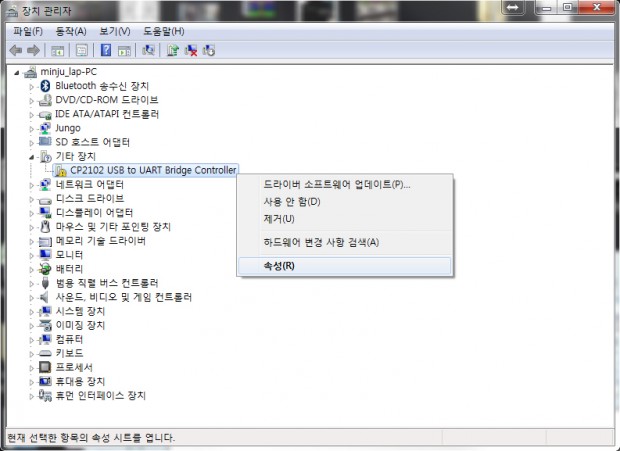
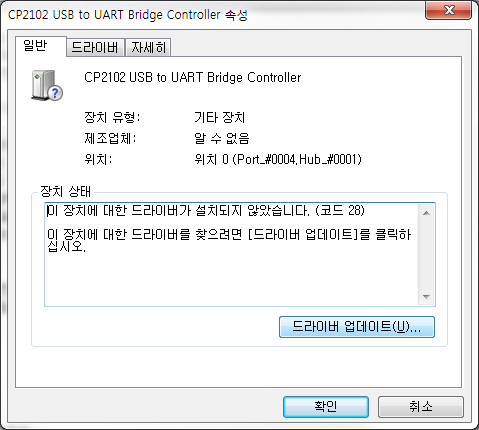
장치관리자에 들어가면(윈도우 키를 누르고 “장치관리자”입력 후 엔터), 물음표(?)가 표시되고 알 수 없는 장치가 하나 있을 것이다.
드라이버 업데이트를 누른다.
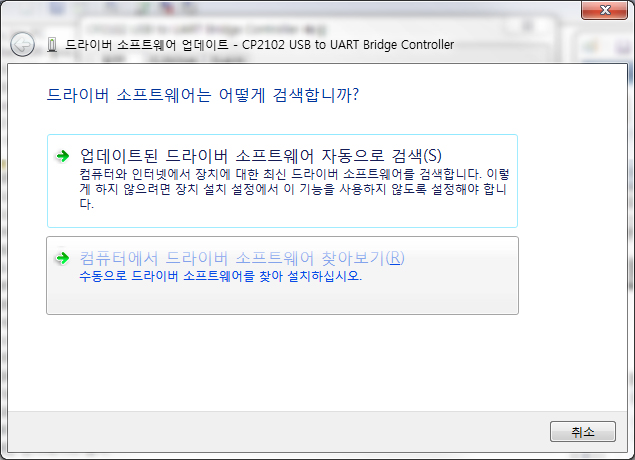
자동검색(위)을 한번 눌러보고 설치가 되지 않는다면 컴퓨터에서 찾아보기(아래)를 누른다.
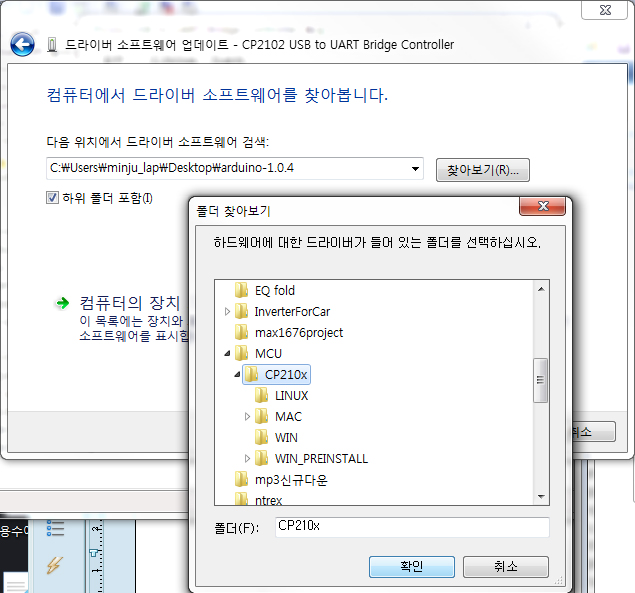
다운로드 받은 zip파일에 CP210X 폴더가 있는데, 이것을 경로로 지정한다.
1~2분 정도 후에 복사과정을 거친 후 드라이버 설치가 완료된다.
모든 과정을 완료하면 장치관리자에서 올바르게 장치를 인식하는 것을 확인할 수 있다. 그림은 장치관리자에서 COM6으로 잡히고 LED바.exe를 실행했을 때 COM6을 선택해 접속한 모습을 나타내고 있다. 부록 3 – USB전원 부족현상
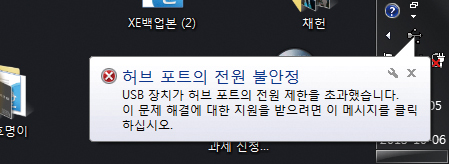
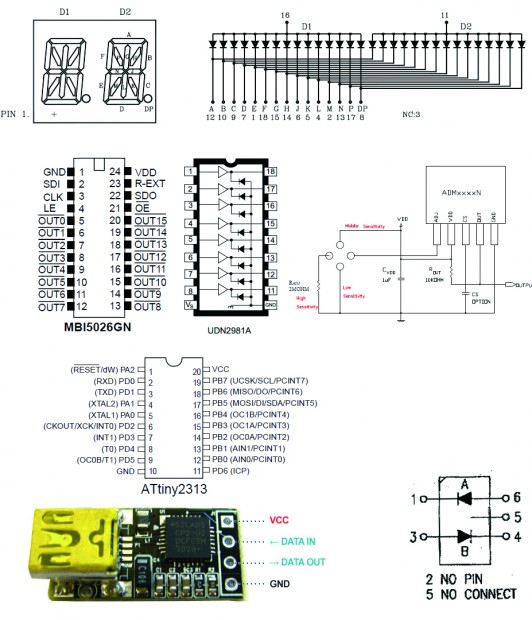
USB 2.0의 경우 최대 500mA를 내보낼 수 있다(물론 대부분은 이보다 여유가 있다). 이번 프로젝트는 평상시 200~400mA정도 사용하고 많은 LED가 켜질 땐 최대 700~800mA정도 사용되는 것을 알 수 있었다. USB전원이 부족한 경우 위와 같은 풍선 말이 표시된다. 이런 경우 USB입력 단자가 두 개 있는(외장하드에 주로 쓰임) 케이블을 사용하면 해결할 수 있다. 부록 4 – 회로도와 부품 핀 정보 TR ARRAY와 USB2UART모듈 사이 전원은 굵게 처리한다.
회로도 PDF 파일 다운받기 |



































 |
기자소개 제작 / 사진 / 글 이민주 객원 기자 현재 원주 한라대학교 전기전자 공학과를 재학중이며, 개인 홈페이지 http://www.itstyle.kr 운영중. |
우리 엔티렉스 연구소의 로봇이 영화 출연을 했답니다.

우리 엔티렉스 연구소의 로봇이 영화 출연을 했답니다.

영화는 “열한시” -바로가기- 라는 영화인데요. 11월 28일 개봉이네요. 제작협찬사로 엔티렉스 로고가 떡하니 있습니다. 사실 영화 주연중 한명인 김옥빈씨의 방에 소품으로 협찬된 것인데요. 영화에서는 그냥 스쳐지나가듯 살짝 살짝 나오는거라 딱 뭐 출연이다 뭐다 할게 없을 수도 있습니다만, 그래도 영화라는 매체에 협찬사로 소개된 것이 어딘가 해서 알려드립니다.^^. 근데 지금 생각해보면 DeviceMart 로고를 넣을걸 하는 아쉬움도 있네요.ㅠㅠ. 아무튼 지난번 SBS 뉴스[바로가기]에 이어, 아리랑 TV[바로가기]와 이번에는 영화에도 살짝 출연하게 되었으니 다음에는 정말 좋은 제품으로 주인공을 꿈꿔봅니다.^^.
개인용 방사능 측정기(QSF103-D)를 소개합니다.


안녕하세요 이번에 소개해 드릴 제품은 개인용 방사능 측정기 입니다.
2011년에 일어난 후쿠시마 원전 사고 때문에 우리 생활에도 방사능의 우려가 확산되고 있습니다.
그로 인해 최근에는 방사능에 대비한 제품들이 출시되고 있는데 그 중 인지도가 높은 아나로그리서치시스템의 개인용 방사능 측정기(QSF103-D) 입니다.
QSF103-D 제품은 벌써 3번의 버전업과 각종 미디어에서 소개될 만큼 많은 인기 있는 아이템 입니다.
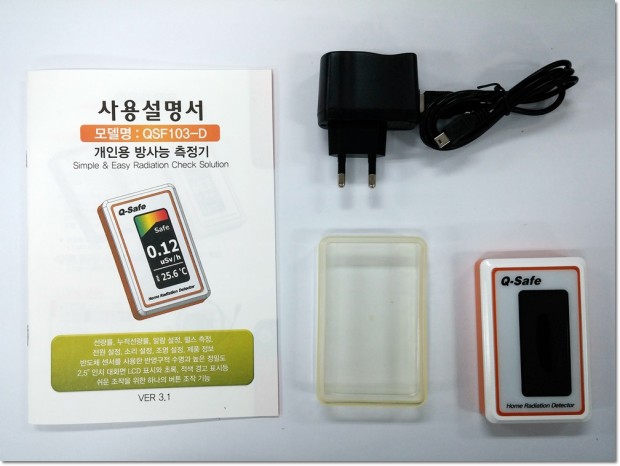
QSF103-D의 구성품은
본체(1), 방수 방진용 실리콘 케이스(1), 충전용 어탭터&케이블(1), 사용 설명서(1) 입니다.
제품 사양
| 구분 | 측정센서 |
| 측정 방사선 | Gamma, X-ray |
| 에너지 범위 | 50 keV ~ 4MeV |
| 센서 종류 | PIN Semiconductor |
| 센서 수 | 10 Sensor Array |
| 온도 | -30℃~45℃ 사용온도 -50℃~70℃ 보관 온도 |
| 습도 | 20 ~90% RH (non-condensin) IP65 |
| 낙하 | 1m onto wood(실리콘 보호 케이스 부착 시) |
| 방수 방진 등급 | IP65 이상(실리콘 보호 케이스 부착 시) |
제품의 특징
 QSF103-D는 크기 6cm(가로) x 9.5cm(세로) x 1.7cm(높이) 무게90g으로 ABS수지 재질로 되어있습니다.
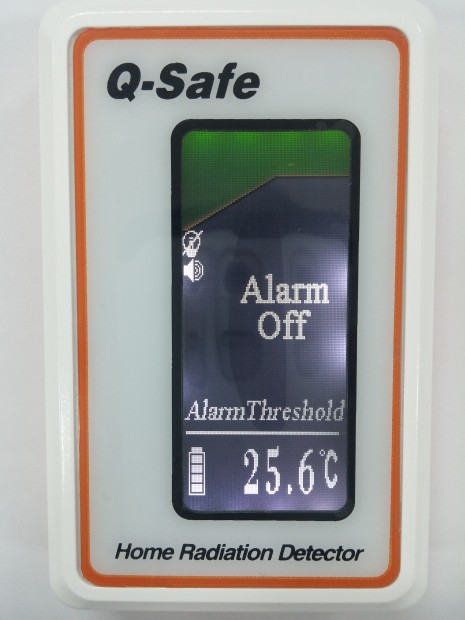
QSF103-D는 크기 6cm(가로) x 9.5cm(세로) x 1.7cm(높이) 무게90g으로 ABS수지 재질로 되어있습니다.전면 LCD는 60mm x 30mm 로 Mono 투과형이며 240 x 128 의 해상도를 갖고 있습니다.
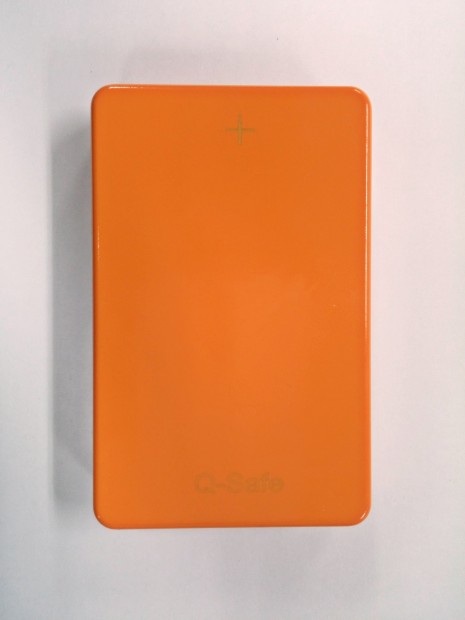 뒷면은 방사능을 측정할수 있는 부분(상단 +)와 제품의 또 다른 이름인 Q-Safe가 각인 되어 있습니다. +표시는 센서가 위치한 자리이며 센서와 측정하려는 물체사이의 거리가 가까울수록 측정이 잘 이루어 집니다.
뒷면은 방사능을 측정할수 있는 부분(상단 +)와 제품의 또 다른 이름인 Q-Safe가 각인 되어 있습니다. +표시는 센서가 위치한 자리이며 센서와 측정하려는 물체사이의 거리가 가까울수록 측정이 잘 이루어 집니다.전원은 Li-Polymer 3.7V 1200mA/h의 배터리가 내장되어 있고 Light on 모드시에 140mA, Light Sleep 모드시에 12mA, 아무것도 하지 않는 대기시에 30uA의 소비 전류가 발생합니다.
 제품의 옆면에는 ON/OFF 기능과 모드 변환 기능을 한번에 사용 가능한 올인원 버튼이 있으며, mini USB B타입의 충전 단자가 있습니다. 제품에 동봉되어 있는 충전기와 일반 컴퓨터의 USB 포트를 이용하여 충전이 가능하며 완충시에는 최대 4일 까지 사용이 가능합니다. 충전단자 왼쪽에 있는 표시등은 충전중에는 적색 표시등이 점등되며 충전이 완료되면 표시등이 꺼집니다.
제품의 옆면에는 ON/OFF 기능과 모드 변환 기능을 한번에 사용 가능한 올인원 버튼이 있으며, mini USB B타입의 충전 단자가 있습니다. 제품에 동봉되어 있는 충전기와 일반 컴퓨터의 USB 포트를 이용하여 충전이 가능하며 완충시에는 최대 4일 까지 사용이 가능합니다. 충전단자 왼쪽에 있는 표시등은 충전중에는 적색 표시등이 점등되며 충전이 완료되면 표시등이 꺼집니다. QSF103-D 에는 총 8가지 모드가 있습니다.
선량률(Survey Meter)
 또한 버튼을 길게 3초이상 누르면 Fast측정과 Normal 측정 모드 변경이 가능합니다. N – 표준속도 1~2분의 반응속도, 정교한 측정 F – 빠른속도 30초의 반응속도, 오염물질의 위치를 빠르게 파악 할 수 있습니다.
또한 버튼을 길게 3초이상 누르면 Fast측정과 Normal 측정 모드 변경이 가능합니다. N – 표준속도 1~2분의 반응속도, 정교한 측정 F – 빠른속도 30초의 반응속도, 오염물질의 위치를 빠르게 파악 할 수 있습니다.누적 선량률(Dose Meter)

알람 설정(Alaram Threshold)
펄스 측정(Total Pulse)

전원 설정(Power On/Off)

소리설정(Sound On/Off)

조명설정(Light On/Sleep)

Toggle Title

방사능 테스트 소스로 측정을 해보았습니다.

테스트소스의 제공은 아나로그리서치시스템이며 소스는 토양에서 추출한(UTK: 우라늄,토륨,칼륨) 으로 구성된 자연 방사선 원소 입니다.
에폭시로 완전 밀봉하여 전혀 외부로 누출될 위험이 없는 제품이며 1cm 이상의 거리만 떨어져도 자연방사선보다 낮은 수치를 보이는 미약한 양입니다.

노말 모드로 약 10분정도 측정한 모습입니다. 이번에 측정기에서 측정한 수치는 0.3uSv/h 이며 샘플 측정값은 매번 달라질수 있습니다.
방사선(감마선)도 전자기파의 일종으로 거리의 제곱의 반비례하여 약해집니다. 거리를 정교하게(0.01mm수준) 조절하지 않으면 측정하는 값은 매번 달라지게 됩니다.
또한 사용 환경에 따른 자연방사선의 변화량도 함께 측정되어 일정한 수치가 나오지 않을수 있습니다.
QSF103-D는 사용하기에 있어서 매우 간편합니다. 하지만 약간의 방사능에 대한 지식없이 사용하기엔 어려움이 있을수 있습니다.
그 어려움과 궁금증을 자주 문의오는 FAQ로 설명 드리고 포스팅을 마치도록 하겠습니다.
꼭 먼저 읽어보시고 구매 또는 사용하시기를 권장 합니다.
FAQ

출처 : 아날로그리서치시스템
아리랑TV에 나온 NTREX

우리는 최근 2013 로보월드에 참가를 했었는데요[바로가기] 그때 참가한 내용이 아리랑TV에도 나왔네요.^^.
10월 29일 아침 7시에 방영되는 Korea Today입니다. 언젠가는 대형 방송에서 우리만 주제로 방송될 날도 오겠죠^^


위에서 부터 차례로 AstroBoyS의 Mecanum Platform III, 6WD, Flipper II 모델입니다.
아리랑TV에 나왔던 영상을 한번 보시죠^^. 아 전체 뉴스는 [바로가기]에서 보시면 됩니다.
저런 아리랑TV같은 TV를 캡쳐떠서 유투브에 올리면 저작권침해라고 뜨는군요. [바로가기]에서 48분지점부터 보시면 로보월드를 소개하고 있습니다.ㅠㅠ.
PC에서 직접 2축 모바일로봇에 연결된 MoonWalker 제어기 다루기

이번 동영상 강의는 PC등의 외부 장치에서 2축 모바일로봇을 구동하고자 할때, MoonWalker를 이용하는 방법을 다룹니다. 간단한 설정법만 다루고 있으며, 좀 더 깊이 있게 제어하기 위해서는 꼭 메뉴얼을 확인하시기 바랍니다.

먼저 이전 강의에서 RC 조종기와 MoonWalker의 연결을 보여드렸는데요[바로가기] 비슷한 연결을 가지면서 PC와 시리얼 통신을 하는 장비를 무선으로 하는 모듈로 연결을 했습니다. 이부분은 그렇게 중요한 부분이 아닙니다. 그냥 테스트를 할려면 유선으로 PC와 연결되어 있으면 선길이의 한계로 힘드니까 무선으로 바꾼겁니다.

반대편은 이렇게 PC에 연결해 주시면 됩니다.
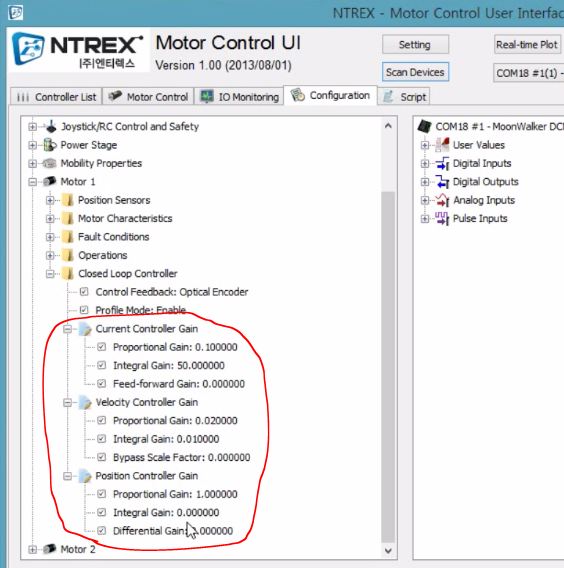
MoonWalker와 같은 제품에서 토크/속도/위치 제어기를 사용하기 위해서는 저렇게 제어기를 세팅해야합니다. 이전 강의들[바로가기]에서도 계속 나왔지만, 모터의 특성과 엔코더의 분해능등을 설정하고 또한 위 그림에서 표시된 부분처럼 각 제어기의 게인을 맞춰 주셔야합니다. 이런 제어 게인들은 모터와 모터가 감당해야하는 부하 및 사용자가 원하는 성능에 따라 항상 다르기 때문에 실험을 통해 적정 게인을 맞추어야 원하는 성능이 나타나게 됩니다.
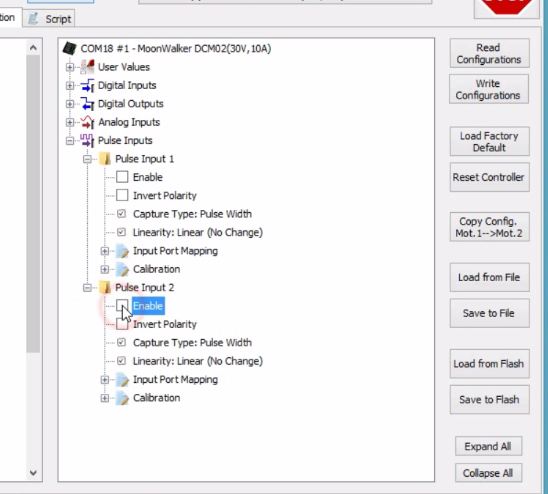
혹시 이전의 RC 조종기를 사용하던 동영상을 학습하면서 따라오셨다면 이번 동영상을 따라하기 위해서는 위 그림에 표시된 RC 조종기와 연결한다는 Pulse Input Enable을 해제 시키셔야합니다. 이번 강의는 외부에서 명령을 주는 형태이니까요.
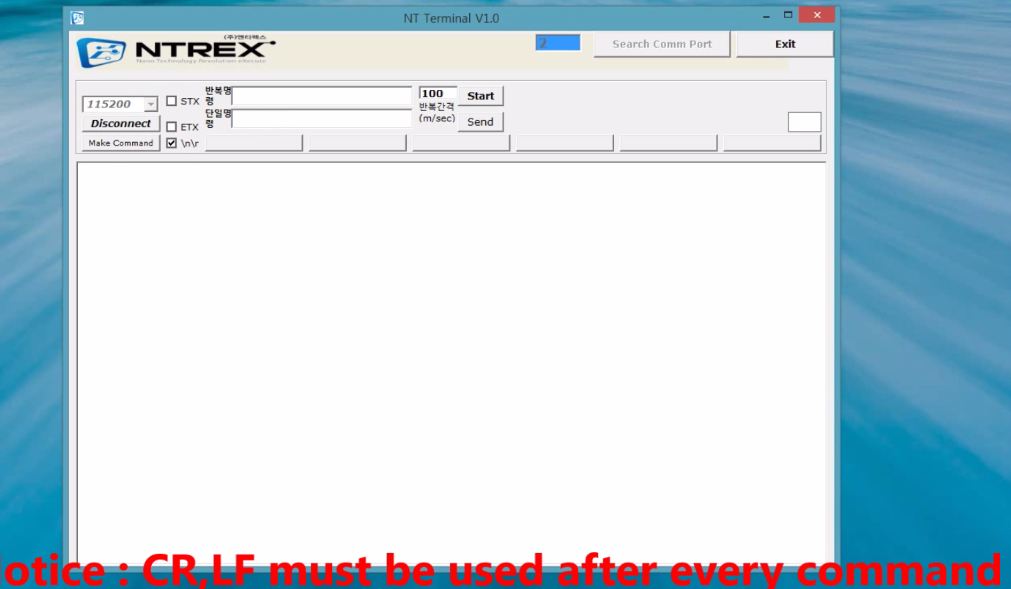
그리고, 아무 Hyper Terminal 프로그램을 사용하시면 됩니다. 이번 강의에서 다루는건 저희가 예전에 배포한 프로그램[바로가기]입니다만, 아무 하이퍼터미널 프로그램이어도 상관없습니다. 단, 데이터를 전송하는 옵션에서 /n/r을 꼭 붙이도록 설정하셔야합니다.
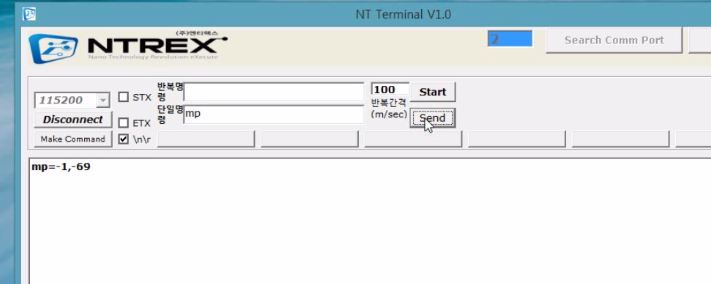
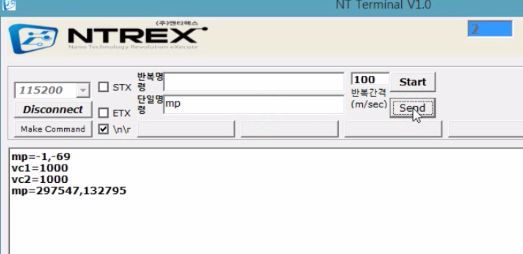
이제 MoonWalker에 mp라는 현재의 위치를 확인하는 명령을 입력해보면, 그 아래 결과와 같이 현재의 두 채널(두 바퀴)의 위치값을 알려줍니다.
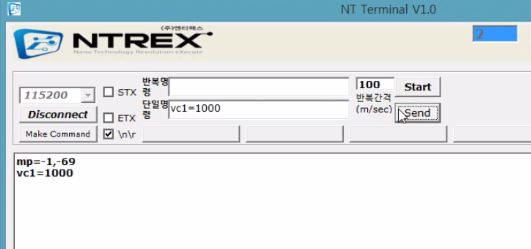
1번 채널에 속도를 1000RPM으로 세팅하는 명령인 vc1=1000이라고 입력하면 1번 채널에 연결된 모터가 해당 RPM으로 회전을 시작합니다. 이때 RPM을 정확히 맞추기 위해서는 다시한번 말씀드리지만, 엔코더의 분해능과 전류 및 속도 제어기의 게인이 정확히 입력되어 있어야합니다.
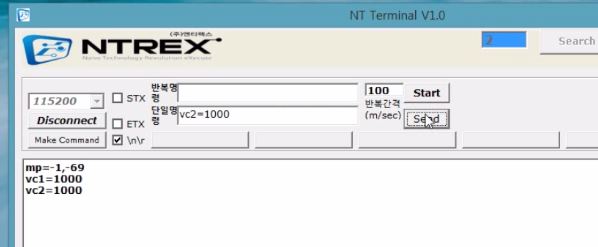
마찬가지로 vc2라는 명령을 통해 2번 채널에 연결된 모터를 1000RPM으로 회전하는 명령을 입력해 보면 모터가 그에 맞춰 회전하고 있음을 알 수 있습니다.
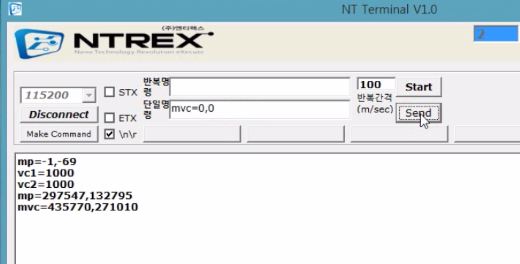
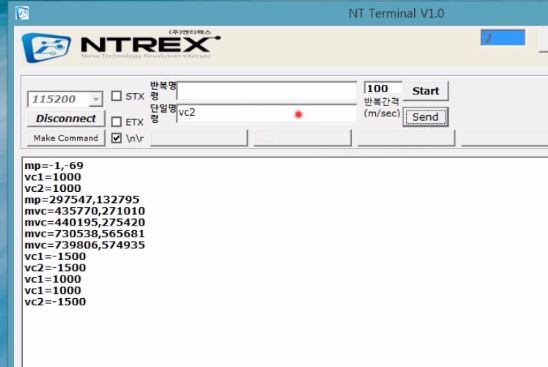
위 그림 중 하나에 나와있는 mvc라는 명령은 두개의 채널에 연결된 두 모터에 동시에 속도 명령을 인가하는 것입니다. 2축 구동형 모바일로봇등에 사용하실때는 유용할 겁니다.
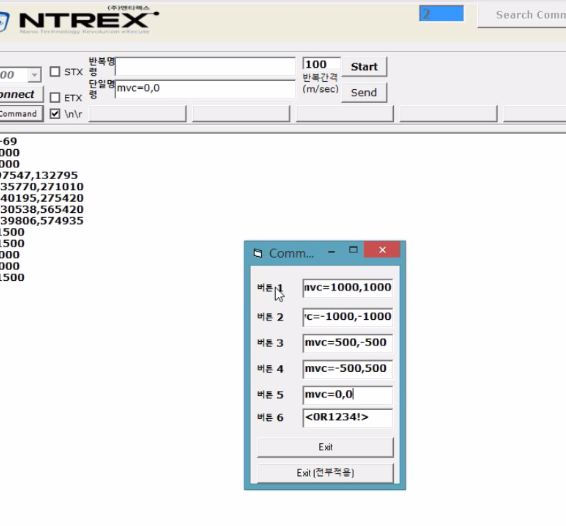
저렇게 명령들을 지정해두고 구동을 확인하면 테스트는 괜찮을 겁니다.

이렇게 PC나 외부 MCU등의 장비를 통해 MoonWalker의 설정을 변경하고, 현 상태값을 읽어오고, 구동 명령을 하달할 수가 있습니다. 좀 더 자세한 사항은 메뉴얼을 확인해주시구요. 나머지는 아래 동영상으로 익혀주세요.