[33호]동아리 탐방 – 인천대학교 AutoIron


동아리탐방 인터뷰
인천대학교 AutoIron
동아리 탐방 신청서를 받고 유선 연락을 취하면서 비교적 연령대가 있는 학생일 거라고 생각했던 것과는 달리, 젊음이 넘치는 모습의 활기찬 동아리 회장 정기호 학생과 많은 동아리원들이 함께 기자를 맞이해 주었다. “유선상으로 듣던 것과는 달리, 생각보다 많이 젊으시네요!”라는 농담으로 인터뷰를 시작하며 가벼운 분위기로 이야기를 진행하였지만, 본인들이 만드는 작품이나, 배우는 부분들에 대한 열정은 진지하고 뜨거웠다. 사내들만 바글바글한 비교적 거친 곳이지만, 그래서인지 멤버들의 관계는 돈독해 보였다. 지역 경제를 생각할 줄 아는 사나이들, AutoIron의 동아리 회장 정기호 학생과, 동아리원들을 함께 만나보았다.
취재 | 이용동 책임기자 bluelyd@ntrex.co.kr
안녕하세요, 디바이스마트 매거진 독자들께 동아리에 대한 간단한 소개 한 말씀 부탁드려요.
저희는 인천대학교 메카트로닉스학과 전공 동아리 오토아이언입니다. 저희가 주로 하는 일은 컴퓨터 프로그램과 하드웨어 설계, 회로 꾸미기와 같이 전공에 맞는 작업들을 하고 있습니다. 사실 학과 수업 만으로는 실질적인 업무들을 충분하게 경험하기 어렵기 때문에, 저희가 직접 동아리를 꾸려 공부하고 있는거죠. 하드웨어는 솔리드웍스로 설계를 하고, 매 분기마다 솔리드웍스 외부 강사를 초청해서 강의를 하고 있고, 매 강의마다 대부분의 수강생들이 자격증을 따고 있어요. 하드웨어는 이런 식으로 교육이 진행됩니다.
소프트웨어, 즉 코딩의 경우에는 랩뷰를 사용하고, 솔리드웍스와 마찬가지로 랩뷰의 경우에도 분기마다 강의를 진행하고 있어요. 동아리원들이 모두 솔리드웍스와 랩뷰를 자유자재로 구사할 수 있는 능력을 갖추기 위해서 교육을 하면서 대회도 나가고, 작품 프로젝트도 진행하는 등의 다양한 활동을 하고 있습니다. 기타 아두이노나 AVR도 마찬가지로 배우고 있습니다. 이렇게 저희는 아주, 굉장히 학구적인 동아리라고 할 수 있죠. (웃음)
동아리 탐방 신청의 목적, 아주 직설적인데요. “상품이 탐나서”.
(모든 동아리원들 폭소) 아, 그게 진짜 솔직히 말씀드리면, 신청서를 썼다는 것만 기억나고 그렇게 썼는지는 기억이 안 나거든요. 근데, 정말 상품이 굉장히 좋았던 것으로 기억을 하거든요. 그래서 그랬나봐요. 3D 프린터는 RexBot이었죠? 그러면 맞는 것 같아요. (웃음)
AutoIron이 다른 동아리들과 차별화할 수 있는 강점은 무엇이 있을까요?
저희는 다른 동아리보다 개개인의 역량이 뛰어나다고 자신있게 말씀드릴 수 있습니다. 저희는 거의 모든 동아리원이 솔리드웍스 자격증을 보유하고 있거든요. 그래서 어디선가 설계에 대한 의뢰가 들어와도 모두들 자신있게, 누구라도 원하시는 대로 해낼 수 있을 만큼 역량도 있고, 그만큼 준비도 되어있습니다. 대부분이 준프로급 이라고도 자신 있게 말씀드릴 수 있어요. 요즘 대학생들이 보통 다들 학점이나 영어에 대해서 많은 시간을 할애하는데, 저희는 다 실무적으로 프로그램도 다룰 수 있고, 지난 주까지만해도 모든 동아리원들이 밤을 새면서 프로젝트를 했어요.
그렇다면 그런 프로젝트는 학교에서의 시험 외의 프로젝트인가요?
그렇죠, 개인적인 프로젝트도 많구요. 개인적인 프로젝트가 있을 때 대회나 공모전이 있으면 그 부분에서 지원을 할 수도 있는 거지, 저희는 대회나 시험을 위해서 프로젝트를 진행하지는 않습니다. 그렇기 때문에 모두들 열정이 있고, 그만큼 역량을 많이 키워왔고, 어떤 학교나 동아리보다도 뛰어나다고 자신있게 이야기할 수 있습니다.
 |
| AutoIron의 현 회장, 정기호 학생 |
취업을 생각하지 않을 수 없는 대학생으로서, 학점 관리에 대한 부담이 그래도 상당할텐데요.
사실, 학점을 특별하게 관리하려고 생각하는 것은 아니지만, 다들 학점이 좋더라구요. 물론 그렇지 않은 사람도 있지만, 대부분은 그렇더라구요. (웃음) 아무래도 프로젝트를 열정적으로 진행하다 보니까 전공에 대해서 빠삭해지는 경향이 있더라구요. 교양 수업은 좀 어려운데, 전공 공부나 시험과 개인들의 프로젝트는 서로 도움을 주고 받더라구요.
그렇다면 다른 사람들의 눈에는 AutoIron이 어떤 동아리 일까요?
그런 것은 안 그래도 제가 최근에 몇 번 생각해 봤는데요, 학과 내 제3자들의 시선으로 봤을때, 아무래도 과에서 자기가 잘났다고 생각하는 사람들이 모여서 자기들만의 세상을 만든 곳은 아닐까 하는 생각일 수도 있겠다, 그래서 벽이나 울타리가 높아 보일 수도 있다고 생각했어요. 워낙에 저희들끼리 사이가 돈독하기도 하구요. 그런데 사실 저희가 동아리원을 받을 때, 학과 제한도 없고 아무나 다 받아주거든요.
선후배 사이에 군기나 이런 부분들도 전혀 없구요. 뒤에 있는 분들 다 형들인데 보시다시피 이렇게 편하게 대하거든요. 그렇지만, 사실 활동이 하드코어 하다보니까 힘들고 벽이 높은 동아리라고 볼 수는 있을 것 같아요.
동아리에서 최근 다루고 있는 이슈, 또는 주제는 어떤 것들이 있나요?
제가 지금 무인 항공기 쪽을 다루고 있는데, 이 무인 항공기는 보통의 많은 학부생들이 생각하는 RC나 드론을 가지고 개조를 하는 수준이 아니라, 처음부터 프로그램, 하드웨어까지 모두 제가 설계, 제작하는 것으로 진행하고 있습니다. 심지어는 코딩까지도 어디서 긁어오지 않고 제가 직접 다 짰습니다. 조종기도 RC나 드론의 조종기를 쓰는 것이 아니라, XBOX의 컨트롤러를 컴퓨터에 연결해서 화면을 보면서 컨트롤할 수 있도록 만들고 있어요. 화면을 보면서 1인칭으로요. 제가 어렸을 때부터 XBOX를 엄청 좋아했거든요.
또 다른 동아리원은 기존의 보행 로봇들보다 훨씬 정밀한 4족 보행 로봇을 만들고 있습니다. 영상을 송·수신할 수 있는 로봇이요. 이 로봇도 마찬가지로 XBOX 컨트롤러로 조작 가능한 로봇입니다. 그렇게 보면, 지금은 XBOX 컨트롤러를 활용한 비행/보행 로봇이 이슈라고 보면 될 것 같아요.
그런 좋은 로봇들을 만들게 되면, 만들게 되는 과정이나 소스를 공개하실 생각도 있나요?
사실 개발을 위한 자금을 마련하기 위해서 공모전이나 대회에는 출품하고 있어요. 그게 있어야 개발이나 연구를 해야 하잖아요. (웃음) 그런데 이런 자료들에 대해서 오픈 예정은 없어요. 현재 드론만 해도 이런 저런 문제점이 나타나고 있는데, 제가 만드는 무인 항공기는 꼭 잘못된 사람들의 손에 들어가거나 하지 않더라도, 실수로라도 인명피해가 발생할 수 있기 때문에, 웬만하면 공개하지 않으려고 해요. 다른 동아리원들 중에서는 이런 공개에 대해서 차근차근 준비하고 있는 멤버도 있어요.
마지막으로, AutoIron의 2015년 남은 기간은 어떤 계획이 있나요?
동아리 활동 상으로는 현재 솔리드웍스 경진대회가 있어서 이 대회를 위해 준비중이고, 교내 대회 중에서도 3D 프린팅 대회가 있어서 마찬가지로 준비하고 있습니다. 겨울에는 솔리드웍스 강의가 있지만, 가을 동안 너무 바빴던 것이라서, 아마도 이번 겨울에는 그래도 조금 휴식도 취하면서 진행하게 되지 않을까 합니다. 또 이번 겨울에는 자동화, 영상 처리에 대해서 공부를 할 수 있는 기회를 만들고자 합니다.
마치며.
디바이스마트를 애용하는 이유에 대해 물었을 때 ‘Maker 정신’에 맞는 다양한 해외 상품들이 구비되어 있다는 장점을 말하고는, 지역경제를 위한다는 재치를 발휘하기로 했다. 당차고 활기찬 모습에, 가벼운 느낌이지는 않을까 했던 기자의 우려는 이야기를 시작하고 얼마 되지 않아 보기 좋게 빗나갔다.
본인의 생각에 대해서 자유롭고 자신감 있게 표현할 수 있는, 그러면서 본인들이 하고 싶고 잘 하는 것에 대해서 뜨거운 열정으로 도전하는 모습에 감탄을 하며 인터뷰를 마쳤다.
[33호]업체탐방 – 노택종 (주)펌테크 대표


업체탐방 인터뷰
노택종 (주)펌테크 대표
회사가 아닌, 경기도 광주 어느 칼국수 집에서 처음 만나 뵌 (주)펌테크의 노택종 대표님은 훤칠한 키에 웃음이 참 잘 어울리는 인상을 가지고 계셨다. 맛있는 점심 식사를 하고 나서 들어간 회사 사무실 곳곳은, 사진을 찍기 위해서 급하게 치운 모습이 아닌, 항상 반짝이고 정돈된듯한 모습이었다. 무엇보다도, 생산된 제품이 판매처로 가기 전에 보관되는 상품 보관실의 모든 박스 안에 제품과 함께 자리 잡고 있는 습도계에서, 상품에 대한 진정성과 성의를 느낄 수 있었다. 고객이 지불하는 금액에 대한 가치를 소중하게 생각할 줄 아는 업체, (주)펌테크의 노택종 대표님을 만나보았다.
취재 | 이용동 책임기자 bluelyd@ntrex.co.kr
먼저 디바이스마트 독자들께 인사 한 말씀 부탁드립니다.
안녕하세요. 블루투스 및 지그비, 교육용 장비 등 무선 제품을 전문적으로 개발하고, 제조하는 주식회사 펌테크 대표이사 노택종입니다.
국내 최대의 전자부품 쇼핑몰인 디바이스마트와 인연을 맺은지도 벌써 7년이 지나고 있습니다. 그동안 디바이스마트를 통해 우리의 제품을 고객들께 더 널리 알릴 수 있었으며, 앞으로도 우리는 고객들이 원하는 제품을 개발할 수 있도록 최선을 다할 것입니다. 그리고 2016년에는 디바이스마트와 공동 주관으로 블루투스, 지그비 등 무선에 관련된 교육과 세미나를 통해 고객들과 조금 더 가까운 곳에서 소통할 수 있는 기회를 만들어보려고 합니다.
펌테크 설립이 2005년 10월인데, 어느새 꽤 오랜 시간이 흘러 올해가 10주년인데요.
이 질문지를 받아들고, 제가 참 많이 웃으면서 놀랐습니다. (웃음) ‘벌써 10년이 되었나?’ 싶고 감회가 정말 새롭습니다. 10년을 돌아보면, 과연 정보통신 분야에서 이렇게 빠르게 변화된 시절이 있었을까 싶은 생각이 들 정도로 바쁘게 지내온 것 같습니다. 라이프사이클도 짧아지면서 이런 세상에서 살아날 수 있을까 하는 생각도 하고 살고 있었거든요. 어떤 통계 자료에서는 10년이 지난 기업의 생존률이 8% 정도 된다고 하더라구요. 저희가 그런 8% 안에 들 수 있었던 것에 대해서 감사하기도 하구요.
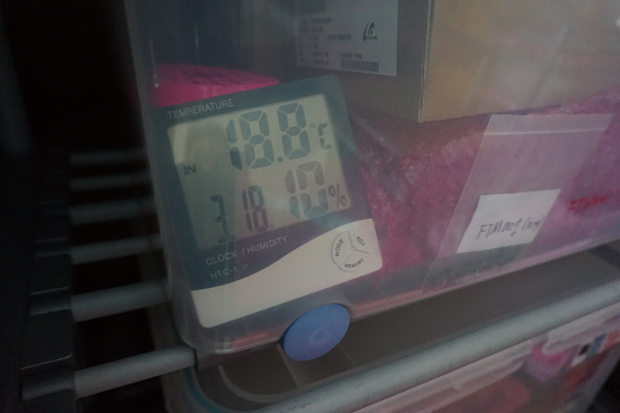 |
| 상품 보관 박스 안에서 정확하게 10%를 가리키는 습도계 |
언제부터 이렇게 블루투스 시장이 커졌을까 생각해보면, 아이폰이 출시되면서 블루투스를 탑재하고 나왔는데, 이 부분부터 본격적으로 블루투스 악세사리 등 많은 제품들이 나오고, 산업 전반에 걸쳐서 블루투스 시장이 눈에 띄게 확 커졌어요. 그 도움을 많이 받았다고 생각합니다. 6년 정도 된 것 같구요, 그 때부터 살 것 같다는 생각이 들기도 했어요. (웃음)
IoT의 영향으로 실제로 거래하는 업체가 현재는 700군데가 넘는데, 자동차, 생활가전, 조명 등 헤아릴 수 없이 많은 분야의 많은 거래처가 생겨났고, 그 기간 동안 저희 펌테크 제품을 찾아주신 고객들께 항상 감사하고, 또 감사합니다. 감회가 정말 새롭네요.
중소기업으로서, 해외 대리점이 세계 곳곳에 있는 업체가 흔치 않은데요.
아르헨티나, 프랑스, 일본, 영국까지. 게다가 영문 홈페이지까지 마련해 두셨습니다.
글로벌한 사업을 진행하는 것이 쉽지는 않을텐데, 정말 대단하신 것 같습니다.
과거부터 블루투스라는 것이 국제 규격으로 정해져 있는 것이다보니, 해외에도 제품을 팔 수 있는 구조였습니다. 그런데 처음이라 방안도 없고, 경험이 없다 보니, 맨땅에 헤딩 또는 몸으로 떼우자는 식의 생각으로 접근을 했습니다. 분명히 자금이 넉넉하지는 않았지만, 국내 뿐만 아니라 해외 전시회에도 많이 참여했고, 특히 독일과 같은 해외 유명 잡지들에 지속적으로 높은 금액을 투자해서 광고를 실었습니다. 오프라인은 이런 식으로 진행했고, 온라인 쪽으로는 요즘에 많이 유명해진 Alibaba 광고도 저희는 예전부터 지속해 왔고, Google에도 꾸준히 광고를 했구요. 사실 Google 광고를 공짜라고 생각하시는 분들도 많겠지만, 실제로는 생각보다 Google의 Adsense라는 광고 상품이 꽤 비용이 높은 경우도 있거든요. 온라인 쪽으로는 이런 식으로 시장을 개척했어요. 또 시장 개척단을 통해서 인도, 대만, 홍콩, 싱가폴 쪽으로도 계속 두드렸고, 업체도 만나면서 3년 이상 홍보 활동을 지속했습니다. 그러다 보니 심지어는 아프리카 지역에서도 대리점 문의가 오기도 하더라구요. 중국, 태국, 터키와 같은 많은 국가에서 컨택이 왔구요.
그런 기간을 겪으면서, ‘Made In Korea’에 대한 세계 시장의 평가가 꽤 괜찮다는 것을 알 수 있었고, 저희 브랜드에 대한 믿음보다도 ‘Korea’에서 만들어진 제품이라는 것에 대한 덕도 상당히 볼 수 있었습니다. 그런 덕분에 아무것도 없는 저희가 수천만원짜리 첫 오더를 얻을 때도 있었죠. 사실 저희도 깜짝 놀랐어요. (웃음) 그리고 해외 전시회를 잘 다닐 수 있었던 것은, 저희 제품이 2천만원어치 제품을 해외로 배송을 보내더라도 아주 작은 박스 하나로, 빠르고 저렴하게 가능하다는 점도 뒷받침이 되었던 부분도 있습니다.
물론 해외의 다양한 대리점을 관리하는 것이 쉽지는 않지만, 현재의 6개 대리점을 12개로 늘릴 계획도 하고 있습니다. 대신 그런 관리를 담당하는 총판 업체를 운영할 예정입니다.
다양한 사업 분야중에서도 펌테크가 바로 ‘무선 통신 분야’의 사업을 하시게 된
특별한 계기는 무엇인가요?
원래부터 펌테크라는 회사로 설립되었던 것은 아닙니다. 2002년에 국내의 한 전자회사와 관련된 코스닥 상장 업체를 운영하게 되면서, 투자를 받은 사업을 주관하게 되었습니다. 그 당시에는 블루투스 제품/사업이 주가 특공대의 역할을 하던 시절이었거든요. 당시에는 15명 정도의 규모로 시작을 하게 되었습니다.
블루투스라는 제품군이 비교적 생소한 제품이었고, 블루투스를 활용한 제품이라고 해봐야 헤드셋 정도의 시제품이 나오는 시절이었어요. 그 전자회사는 그런 제품을 만들지도 않은 상황이었죠. 그래서 저희가 했던 일은 스마트폰이 아닌, 피쳐폰에 블루투스 기능을 넣는 일을 맡아서 하게 되었습니다. 그런데 이런 작업 자체가 너무 어렵고 번거롭다 보니까, 대기업에서도 그런 업무를 직접 하지는 못했고, 소프트웨어 포팅하는 것 까지의 작업을 저희가 전담으로 맡아서 하게 된 겁니다. 그렇게 그 전자 회사 뿐 아니라 다른 중견 회사의 폰에 들어가는 블루투스 기능 삽입/포팅 업무까지도 거의 저희가 했습니다. 또한 일본 쪽에서는 의료 산업에 있어서 블루투스 기술이 막 접목되는 시기였고, 마침 그런 기류로 인해서 프로젝트성 사업이었지만 저희가 진행할 수 있기도 했었죠. 그런데 사실상 블루투스라는 아이템에 대한 관심은 있던 시절이었으나, 사업화는 제대로 진행되지 않은 시절이라서, 그 당시 매출은 정말 미미했습니다.
 |
| 첨단기술연구소 |
결국에는 일을 시작하고 나서 2년이 지나, 수익성 악화로 인해서 사업을 접게 되었죠. 그렇게 일을 접게 되면서, 헤드셋이나 폰과 관련된 작업은 수익성이 좋지 않겠다는 판단으로 당시 인원들과 함께 기존에 만들어 두었던 데이터 통신용 블루투스 모듈을 활용해서 블루투스 데이터 통신 모듈을 사업화 하게 되었습니다.
물론 지금은 대부분의 장비/기기들에 블루투스가 매우 잘 상용화 되어있지만, 당시에만 해도 보수적인 산업 현장의 특성상, 블루투스의 인기가 아무리 높아도 기술을 산업 현장에 적용시키는 데에는 상당히 어려움을 많이 겪었고, 시간도 많이 걸렸습니다. 2005년에 기존의 업체를 인수한 후, 공교롭게도 마침 전광판용 대형 LED에 대한 꽤 많은 수요가 생기면서 이런 전광판의 데이터를 무선으로 주고받을 수 있는 모듈에 대한 수요도 커지면서 다양한 업체가 등장하고, 시장이 커지면서 상황이 괜찮아졌죠.
대기업이 볼 때에는 분명히 ‘틈새시장’에 지나지 않는 크게 매력적이지는 않은 시장이겠지만, 저는 그런 틈새시장을 공략하는 것이 저희처럼 작은 규모의 업체가 바라볼 수 있는, 옳은, 생존할 수 있는 방향이라고 생각하고, 그래서 이 시장에 맞는 다양한 상품을 개발하게 되었습니다. 다행히도 블루투스라는 것은 다양한 나라에서 만들지만 국제적으로 규격이 정해져 있어서, 실제로 사업을 시작하자마자 독일로 수출을 할 수 있었던 계기도 되었습니다. 이런 부분들이 저희 펌테크가 시작하고, 성장할 수 있는 부분이 되었습니다.
작년까지만 해도 펌테크는 주로 다양한 기능의, 또는 뛰어난 성능의 제품들을 많이 출시했었는데,
올해 제품들은 아주 작고 간단한, 또는 기본적인 기능의 저렴한 제품들도 많습니다.
시장 규모가 갑자기 많이 커지면서, 실질적으로는 필드에서 사용자가 많이 늘었습니다. 시장 수요의 파이가 커지다 보니까 다양한 루트나 목적의 수요처도 발생하게 되더라구요. 생산을 하는 업체의 고민은 항상 단가 문제이다 보니까, 저희도 이 문제에 맞춰서 고민을 할 수밖에 없더라구요. 이러한 저렴한 제품에 대한 수요도 중요하고, 또 무시할 수 없는 수요이기 때문에, 하이엔드 제품뿐만 아니라, 로우엔드 제품군들도 많이 마련하려고 합니다. 아마 앞으로 출시되는 제품들도 기능면에서 하이엔드/로우엔드 제품들을 각각 차별화해서 출시할 계획이고, 중국 제품을 사용하면서 A/S를 받지 못하고 속앓이 하고 계시는 고객들을 위해서 가격 측면에서도 다양한 제품을 공급할 예정입니다.
무선 통신 분야에서 꽤 높은 인지도의 업체로 오랜 기간을 발전해 오셨습니다.
요즘 무선 통신 분야 시장, 펌테크는 어떻게 보시나요?
현재 IT 분야의 공동 화두가 IoT거든요. 현재의 IoT 단계는 사실은 ‘서비스’에 집중되어 있습니다. 즉 ‘개념 정립기’라고 할 수 있어요. 지금 막 시작되어 있는 단계라, 2-3년 후에는 많이 활성화되어 있을 것은 자명한 사실이라고 볼 수 있습니다. 현재 출시되는 보일러 컨트롤러, 가정용 IoT 서비스 등 제품들은 초창기 모델이라고 할 수 있습니다. IoT 시장에서 사용되는 네트워크 구성은 대부분 블루투스와 와이파이가 70% 이상 차지하기 때문에, 블루투스 기기의 수요는 앞으로도 더 늘어날 것이라고 생각합니다.
현재의 블루투스와 와이파이 기술은 IoT라는 서비스에 적합한, 최적화된 기술이라고 생각하고, 이를 대체할 만한 기술이 새로 생기는 일은 5-6년 동안에는 어렵지 않을까 생각합니다. 이에 따라서 블루투스 기기의 수요도 많이 늘어날 것 같습니다. 최근에 인기가 높아지고 있는 ‘비콘’이라는 기술도 블루투스 기술의 제품이라고 할 수 있거든요. 다양한 시장에서 블루투스 기술이 필요한 만큼, 수요가 점점 더 늘어날 수밖에 없는 것 같습니다.
 |
| 미팅룸 한 쪽 벽면을 가득 채운 전 세계 다양한 인증서들 |
국내·외 다양한 업체들과 경쟁 중이신 것으로 알고 있습니다.
펌테크 제품만의 특징 또는 자랑거리는 어떤 것이 있을까요?또는 제품 개발에 있어서 가장 중요하게 생각하시는 부분은요?
지금 저희 제품의 특징은 바로, 처음 기획 단계에서부터 제품의 컨셉을 ‘사용자 편의성이 뛰어난 제품’으로 잡고 개발을 한다는 것입니다. 편리하고, 빠르게 사용할 수 있도록 만드는 것이 저희 펌테크의 목표입니다. 결국에는 이 펌테크의 제품을 가지고 상품 개발자가 빠르고 편리하게 상품화할 수 있도록 하는 것이죠.
그리고 저희가 가장 중요하게 생각하는 것은 바로 ‘품질’입니다. 사실 제가 예전에 수출을 하다가 큰 일을 겪은 적이 있는데, 그 때의 경험을 계기로 품질에 더 많은 정성을 할애합니다. 과거에 그 일이 생겼을 당시에는 샘플링 검사를 했던 것인데도, 불량률이 좀 나오더라구요. 샘플링과 전수 검사는 생각보다 품질에서 큰 차이를 보이더라구요. 그 이후로는 제품을 생산하면, 모든 제품에 꼭 전수 검사를 하고 있습니다.
 |
|
펌테크의 기술과 제품이 적용된 다양한 분야의 다양한 제품들 |
이렇게 좋은 펌테크의 신제품을 기다리고 궁금해 하시는 분이 계실 텐데요.
신제품에 대한 소식도 살짝 들려주세요.
제가 지금 생각하고 있는 제품들이 올해부터 내년 초반까지 나올 제품들인데요, 이 제품들이 블루투스 4.0과 4.1 기반으로 구성되어 있으며, IoT 서비스에 꼭 맞는 제품입니다. 4~5가지 정도의 모델을 준비 중입니다. 최근 출시한 TI 칩셋 기반의 제품 뿐만 아니라, CSR칩 셋을 탑재한 블루투스 4.1 제품도 준비 중입니다. BLE 제품들도 특장점에 있어서 조금씩의 차이는 있을 수 있기 때문에, 고객들께 다양한 선택지를 제공해드릴 수 있을 것 같습니다. 블루투스라는 공통 규격, 프로토콜은 같지만 외부에 핀을 몇 개를 설정하느냐, 처리 속도는 어떤가 등의 차이로 생각하시면 될 것 같습니다.
또한 아두이노와 함께 활용할 수 있는 통합 버전도 10개 모델 정도 준비중입니다. 아두이노를 쓰시는 고객들이 많은데, 이런 분들이 BLE를 편리하게 사용하실 수 있도록 할 계획이고, 여기에 안드로이드 앱도 함께 만들어서 소스를 무료로 오픈할 예정입니다. 그에 따른 손해가 발생할 수는 있지만, 그게 꼭 가장 중요한 것은 아니기 때문에 이런 판단을 하게 되었습니다.
마지막으로, 디바이스마트 매거진 독자들께 하시고 싶은 말씀은?
디바이스마트 매거진 독자 여러분, 그리고 펌테크 제품을 사용해 주시는 모든 분들께 먼저 감사의 말씀을 드립니다. 요즘 스마트폰의 대중화로 인해 블루투스를 이용하여 스마트폰과 연동되는 제품들을 보면 아이디어 상품, 생각하지도 못한 멋진 제품들이 많이 쏟아져 나오고 있습니다. 그런 좋은 제품들에 저희가 개발한 제품이 탑재되는 것을 볼 때, 한편으로는 기쁜 마음과 한편으로는 더 노력해서 고객들이 믿고 사용할 수 있는 제품을 개발해야겠다는 생각이 듭니다.
앞으로도 현재의 위치에 만족하지 않고, 저희 펌테크의 제품을 구매하시는 고객들께서 지불하는 그 비용의 가치, 그 가치가 헛되지 않는 제품을 만들어 내기 위해 끊임없는 연구 개발과, 최적화된 제품을 만들 수 있도록 최선을 다하겠습니다.
많은 응원 부탁드립니다.
 |
| 베스트셀러, 블루투스 임베디드 모듈(FB155BC) (상품코드 : 12418) |
[33호]원격지 작업이 가능한 이동 로봇 팔 관리 시스템


2015 ICT 융합 프로젝트 공모전 입선
원격지 작업이 가능한 이동 로봇 팔 관리 시스템
글 | 부경대학교 공영훈, 김준영, 김지수, 김민지, 김인준, 이동환
심사평
JK전자 이동을 하면서 섬세한 작업까지 가능한 이동형 로봇팔은 여러 분야에서 활용이 가능한 작품이다. 라즈베리파이에서 획득한 영상을 YUV형태 그대로 비 압축으로 영상을 전송하기 보다는 압축된 형태의 스트리밍으로 전송했다면 영상 전송의 프레임 속도가 조금 더 좋았을것 같다. 그리고 한가지 아쉬운 점이 로봇팔 제어를 위해 사용된 부품이 상용제품을 사용하여 약간은 쉽게 구현하였는데, 이 부분까지 직접 구현해 보았으면 좋았겠다.
뉴티씨 재난 상황에서 쓸 수 있는 원격제어 로봇팔은 매우 유용하게 사용될 수도 있다. 재난 상황이라는 것은 의도해서 생기는 상황이 아니므로, 언제든지 일어날 수 있다고 가정하고 대비하는 것이 필요하다. 하지만, 이러한 상황은 자주 일어나는 것이 아니라서, 해당 기술개발 등은 국가나 관련단체의 후원 없이는 개발되기 어려운 것이 현실이다. 하지만, 이번 작품은 이러한 상황에서 사용될 수 있는 로봇을 제작하였다. 다만, 현실적으로 사용된 로봇팔의 모터 등이 얼마나 내구성이 있으며, 방수나 화공약품 등을 방어하는 능력이 어느 정도인지는 의문이다. 현재 구하여 쓸 수 있는 모터 중에서 기능 구현을 위하여 사용한 것으로 생각되지만, 앞으로는 이러한 부분에서도 좀 더 고민하여 작품을 제작하였으면 하는 생각이 든다. 창의성과 실용성, 기술성, 작품완성도 등 다방면에서 높은 점수를 주었다.
칩센 원격을 이용하여 로봇을 조정한다는 점은 유용한 것으로 생각되나, 복합적인 기능을 하기에는 너무 한정적으로 되어 있다.
위드로봇 로봇팔을 원격에서 제어하기 위해 텔레 로보틱스 관점에서 마스터 제어기를 만들어 적용한 작품이다. 영상을 통해 로봇팔의 상황을 인지하여 조작하는 구조로 작성했지만, 실제 로봇팔이 놓인 상황을 모니터링 하려면, 현재 카메라 배치 및 제어 구조로는 어렵다. 그럼에도 불구하고, 마스터 제어기를 만들고, 이로부터 입력을 받아 동작하는 전체 시스템을 구현한 완성도에는 높은 점수를 준다.
작품개요
원격 제어는 로봇을 제어하기 위해 없어서는 안 될 한 분야이다. 원격제어는 우주탐사나 재해 현장과 같은 인간이 접근하기 힘든 위험한 환경에서 그 필요성이 부각된다. 따라서 이 작품은 기존의 산업이나 재해 현장에서 사용하던 로봇 팔의 역할을 그대로 수행하면서 한자리에 고정된 로봇이 아닌, 이동이 가능하며 원거리에서 사람이 영상을 보며 로봇 팔을 원격제어 할 수 있게 한다. 그리고 윈도우 Application을 제작해 로봇 팔에서 전송된 영상데이터를 확인하여 현재 상태를 체크하고 관리하는 시스템을 제작한다.
작품 설명
주요 동작 및 특징
이동용 로봇 팔
MCU : ATmega128
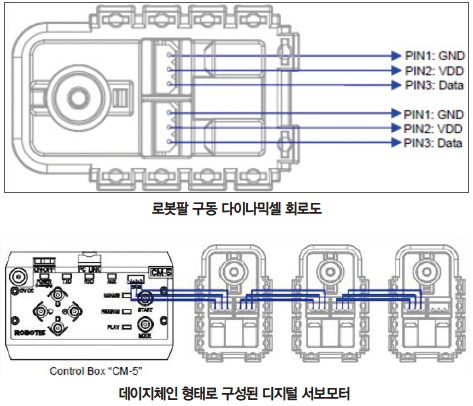
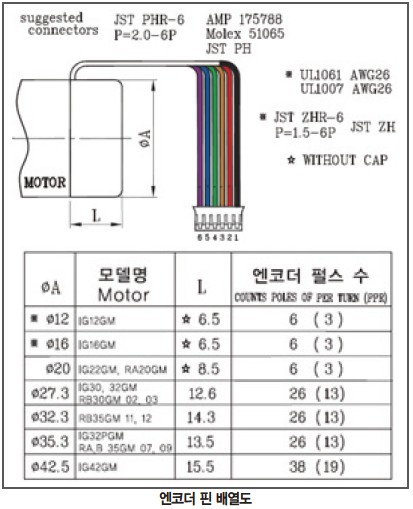
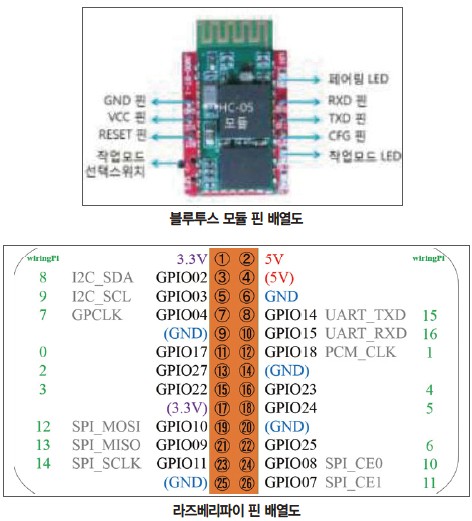
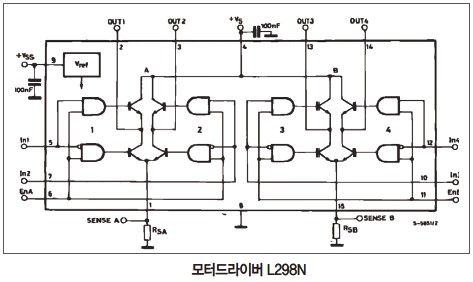
원격지 작업이 가능하기 위해서 주행 모드와 로봇 팔 임무수행 모드 2가지로 분류한다. 각 모드는 Embedded Board인 Raspberry Pi에게 명령을 받아서 동작한다. 원격지로 이동하기 위한 이동 수단으로 바퀴를 선택하였고 (주)디엔지위드 사의 RA-35GM 07TYPE의 DC모터를 사용하며, L298N모터 드라이버를 이용하여 모터를 구동한다. 임무수행을 위해 다이나믹셀로 만든 로봇 팔이 장착되어있다. 다이나믹셀은 로보티즈 사에서 제공되는 프레임을 통해서 모터를 로봇 팔의 형태로 조립하기 쉽고 UART를 이용하여 구동하기 때문에 모터의 제어가 쉬운 장점이 있다. 하드웨어적으로 데이지체인 형태로 연결되어 있다. 제품을 구입할 때 로보티즈사에서 제공하는 다이나믹셀 전용 controller cm-5가 있지만 우리는 cm-5를 대신하여 AVR ATmega128을 사용하여 데이터를 전송한다. 데이터를 전송하기 위해선 다이나믹셀만의 통신 패킷이 필요하다. 다이나믹셀의 데이터시트를 확인하여 그것만의 통신패킷을 구성한다. packet이란 주로 데이터 통신 분야에서 사용되는 용어로 특정의 형식으로 배열되어 있는 비트 열이다. 아래 그림은 다이나믹셀 전용 통신 패킷이고 아래 그림에서 표현하는 순서대로 packet의 역할을 할 배열을 구성한다.
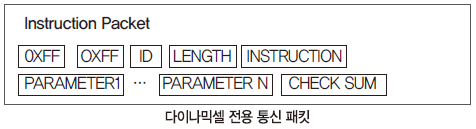
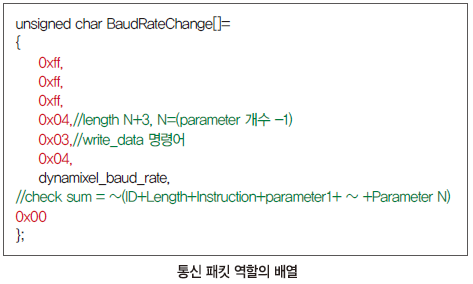
위 그림과 같이 두개의 시작비트 0xff와 모터의 ID, packet의 길이, 다이나믹셀 전용 명령어, 모터의 각도와 속도 등의 명령어 그리고 마지막으로 check sum으로 배열을 구성한다. Check Sum은 배열에 담길 각 데이터들이 정상적으로 도착하였는지 수신부에서 확인하기 위해서 존재하는 것으로 각 회사마다 고유의 check sum 계산 공식이 있으며, 송신부에서 패킷을 전송하면 수신부는 수신 받은 데이터를 사용해 check sum 계산 공식에 대입하여 check sum을 계산해 수신 받은 데이터의 정확성을 확인한 뒤 모터를 구동한다. 각 instruction들은 데이터시트의 Control Table을 통해서 parameter들의 값을 확인할 수 있다. Instruction Set은 다이나믹셀 명령어 집합으로 한 개의 모터를 제어하는 명령어, 여러 개의 모터를 제어하는 명령어, 모터의 현재 상태를 받으려는 명령어, 모터의 기본설정을 바꾸는 명령어 등 다양한 명령어들로 구성되어있다. 그 중 우리가 사용한 명령어는 SYNC WRITE란 명령어로 ATmega128에 연결되어 있는 모터들에게 동시에 데이터를 전송해서 여러 모터를 구동한다. 일반 WRITE 명령어와 비교하였을 때 SYNC WRITE 명령어가 모터가 동시에 동작하게 하여 WRITE 명령어의 단점인 각 모터의 딜레이를 최대한 줄여줄 수 있다. Raspberry Pi와 ATmega128간에 모드 선택 시 사용한 통신은 i2c를 사용한다. i2c는 동기화 통신 방식으로 SCK선으로 동기시킬 클록이 이동하고, SDA선으로 데이터가 이동해야 한다. 데이터 송수신은 SDA선을 한 개 이용한다. 따라서 송수신간 데이터 충돌을 피하기 위한 일정한 프로토콜이 있고, ATmega128을 Slave로 선택하여 구동한다.
(2) Embedded Board : Raspberry Pi
Embedded Board 역할을 할 Raspberry Pi는 이더넷에 연결하고 UVC카메라에서 획득한 영상데이터를 윈도우 Application으로 전송하며 ATmega128의 모드 관리에 사용된다. Raspberry Pi를 사용한 이유는 영상 데이터를 획득하는 것과 이더넷을 이용하기에 ATmega128보다 편리하기 때문이다. 카메라의 영상을 획득하기 위해 먼저 V4L2에 접근한다. V4L2는 영상을 획득하기 위한 Linux 드라이버로 획득한 영상을 RGB형태로 배열에 담을 수 있다. 이더넷에 접근해 데이터를 주고받기 위해선 먼저 소켓 통신이 가능해야한다. 소켓 통신은 쉽게 말해 인터넷을 통해 데이터를 송, 수신하는 방법으로 tcp 소켓, udp 소켓 두 가지 통신이 존재한다. tcp 소켓 통신은 Server가 데이터를 송신하고 수신부에서 송신한 데이터를 수신하였는지 Server가 확인한 뒤 다음 데이터를 전송하고, udp 소켓 통신은 수신부가 데이터를 수신하였는지 Server가 확인하지 않고 계속해서 다음 데이터를 전송한다. udp에 비해 tcp가 안정적이지만 데이터 전송 속도는 udp가 더 빠르다. 우리는 영상데이터의 전송에서 속도 대신 안정성을 선택하였고, tcp 소켓 통신을 이용하여 영상을 전송한다. Udp 소켓 통신은 ATmega128의 모드 설정 시 사용한다. 카메라에서 획득한 영상이 tcp 소켓 통신을 이용하여 윈도우 Application으로 전송되면 사용자는 윈도우 Application에서 이동 형 로봇 팔의 현재 상태를 영상을 통해 확인할 수 있으며, 사용자가 현재 필요한 모드를 결정하고 모드 변경의 명령을 내리면 udp 소켓 통신을 통해 Raspberry Pi로 전달되고 전달된 명령은 Raspberry Pi에서 ATmega128로 i2c를 통해서 전송된다. i2c는 Raspberry Pi를 master로 설정하여 구동한다. tcp 소켓과 udp 소켓을 관리해주기 위해 각각을 하나의 쓰레드로 구성한다. 쓰레드는 실행분기를 나누는 것으로 하나의 프로세서가 여러 개의 실행 흐름을 가지기 위해서 사용된다.
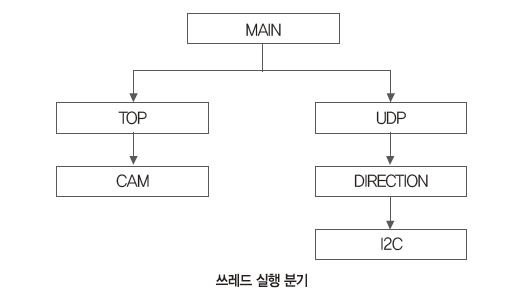
위 그림과 같이 쓰레드 1은 영상데이터를 윈도우 Application으로 전송하는 역할 tcp 소켓으로 구성하고, 쓰레드 2는 윈도우 Application으로부터 방향에 대한 명령을 받은 후 i2c 통신을 통해 이동 로봇 팔로 전송하여 이동형 로봇 팔의 모드를 설정하며 udp 소켓으로 구성한다.
무선 컨트롤러

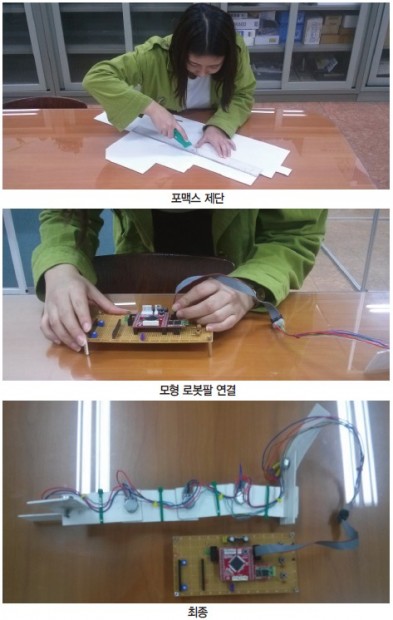
모형 로봇 팔은 포맥스를 통해서 로봇 팔을 조립한 형태의 비율로 축소해서 제작한다. 모형 로봇팔의 각 관절 부분은 가변 저항으로 구성한다.
가변저항의 ADC를 이동형 로봇 팔로 전송해서 모션을 제작할 수 있다. ADC 데이터를 무선 컨트롤러의 MCU에서 로봇 팔의 MCU로 전송할 땐 블루투스 통신을 사용한다. 제작된 모션은 EEPROM에 저장한다. EEPROM에 모션을 저장하고 반복 재생하게 하기 위해 각 가변저항의 ADC를 EEPROM에 저장해 두었다가 다시 불러오는 방법을 이용한다. 모션의 저장과 반복은 Push 버튼을 통해서 구현한다. 3개의 Push 버튼을 외부 인터럽트 핀에 연결하여 Push 버튼에서 발생한 신호를 외부 인터럽트 신호를 확인하여 각 버튼을 누름에 따라 모션의 저장, 반복, 리셋이 가능하게 하였다.
윈도우 Application
로봇 팔의 관리 시스템으로 동작할 윈도우 Application은 UI를 제작하고 쓰레드를 통해 tcp통신과 udp통신을 나누어 관리해주었다. 먼저 UI는 picture box와 button으로 구성하였다. 기본적인 UI구성은 아래와 같이 구성한다. 구성된 UI는 아래 그림을 통해 확인할 수 있다.
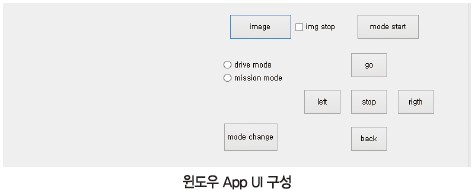
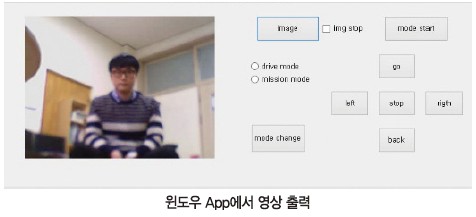
UI의 왼쪽 부분은 Raspberry Pi에서 획득한 영상을 소켓 통신을 통해 전송받은 뒤 출력하는 Picture Box부분이다. image 버튼을 클릭 할시 영상이 출력된다. 영상은 picture Box를 통해 지속적인 출력이 가능하며, 출력된 영상을 통해 사용자는 로봇팔의 현재 상태를 확인할 수 있고, 그에 따라 버튼을 통해서 주행 모드와 임무 수행 모드 두 가지 중 한 가지 모드를 선택하여 명령을 내릴 수 있다. 로봇 팔 모드 설정을 위해 먼저 mode start 버튼을 클릭한다. 그 뒤 중간 radio button으로 ‘drive mode’와 ‘mission mode’ 2가지가 있다. ‘drive mode’를 클릭하고, ‘mode change’ button을 클릭할 시 우측에 ‘go’, ‘stop’, ‘back’, ‘left’, ‘rigth’ 버튼을 통해 로봇의 이동 방향을 조절할 수 있다. ‘mission mode’를 클릭하고 ‘mode change’ 버튼을 클릭할 시 모형 로봇 팔을 통해서 로봇 팔을 제어할 수 있다. 아래는 ‘image’ 버튼을 클릭 시 Raspberry Pi에서 전송된 영상을 출력하고 있는 모습을 Capture 한 그림이다.
전체 시스템 구성
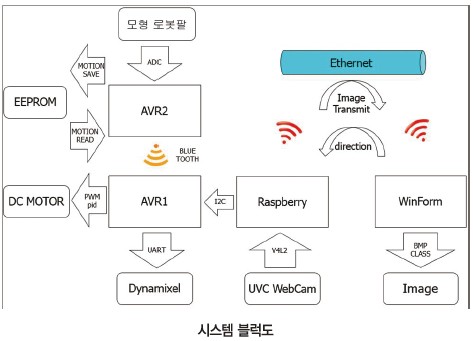
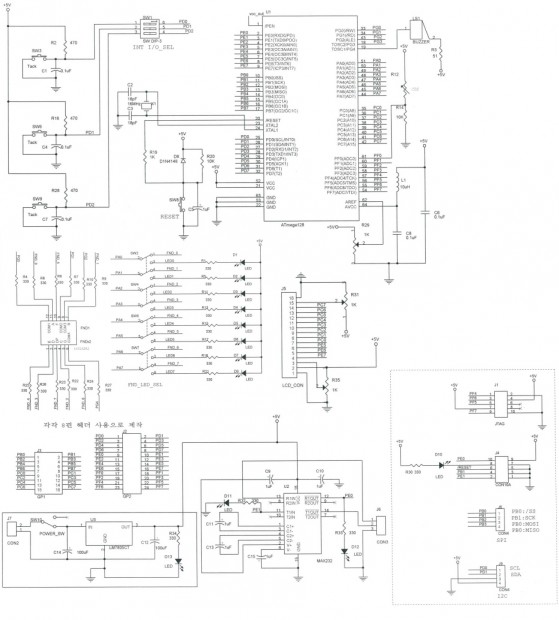
전체적으로보면 AVR ATmega128 2개를 사용하고 DC motor, Raspberry Pi 등의 제품들을 사용한다. 작품의 세부적인 흐름으로 블록도를 구성하면 아래 그림들과 같다.
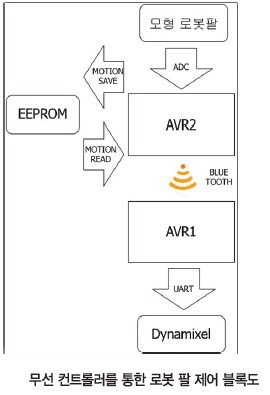
모형 로봇 팔의 모션을 이동형 로봇 팔로 전달하고 메모리에 저장하는 것을 나타낸 블록도이다. 윈도우 어플리케이션에서 로봇팔의 모드를 임무수행으로 선택한다면 AVR2는 모형 로봇 팔을 구성하는 가변저항의 ADC를 블루투스를 이용하여 AVR1로 전달한다. AVR1은 전달받은 ADC를 로봇 팔의 각도 데이터로 변환하고 변환한 데이터를 UART를 이용하여 다이나믹셀로 전송하여 모형 로봇 팔의 모션을 이동 형 로봇 팔에서 그대로 따라할 수 있게 한다. 모션의 저장은 AVR2의 내부 EEPROM을 이용한다. 모형 로봇 팔의 ADC를 획득한 뒤 EEPROM에 저장하고 블루투스를 이용하여 로봇팔로 전송하는 순서로 모형 로봇 팔의 모션을 저장하고, 저장한 모션은 가변저항의 ADC는 무시하고 EEPROM에 저장된 ADC를 반복적으로 불러와 다이나믹셀로 전송하여 저장한 모션의 반복재생을 구현하였다.
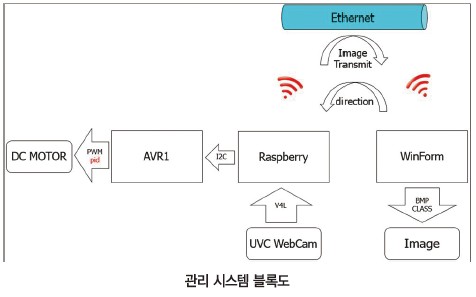
윈도우 Application을 통해 로봇 팔을 관리하는 부분이다. 먼저 UVC camera를 통해 Raspberry Pi는 영상데이터를 획득하고 이더넷에 연결하여 윈도우 Application으로 영상데이터를 전달하는 모습을 볼 수 있다. 사용자는 수신한 영상을 토대로 로봇 팔의 현재 상황을 판단하고 목적지까지 도달하기 위해 주행하여야 하는지 목적지에 도달해서 임무수행이 가능한지를 판단할 수 있다. 목적지에 도달하였다면 임무수행 radio button을 선택하고 무선 컨트롤러로 로봇 팔을 제어하며, 주행 radio button 선택 시 윈도우 Application에서 조향에 관한 명령을 이더넷을 통해 Raspberry Pi로 전송하고, Raspberry Pi가 AVR에게 i2c를 이용해 전달하여 DC모터를 제어하는 모습을 볼 수 있다.
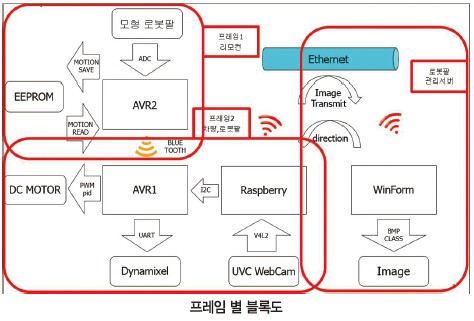
전체 블록도를 구성할 프레임 별로 나누어 보면 무선 컨트롤러의 역할을 할 프레임은 프레임1로 리모컨이란 이름을 붙여두었고, 이동형 로봇 팔의 프레임은 프레임2로 차량, 로봇팔이란 이름을 붙여두었다. 마지막으로 프레임은 아니지만 하나의 관리 서버 역할을 할 윈도우 Application을 하나의 프레임으로 구분해 주었다.
개발환경
단계별 제작 과정
모형 로봇팔, 이동형 로봇팔 납땜

이동형 로봇팔 제작
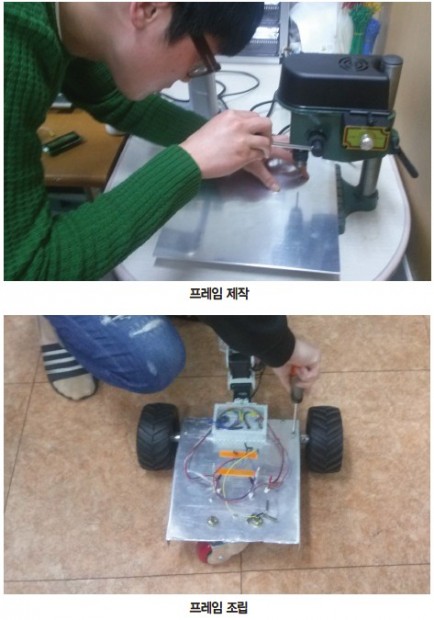


모형 로봇팔 제작
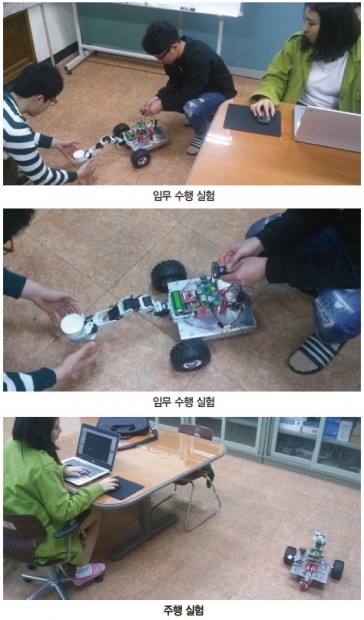
실험 사진
기타
회로도
소스코드
AVR
이동형 로봇팔
#include <iom128.h>
#include <ina90.h>
#include “Header/DcPid.h”
#include “Header/i2c_k.h”
#include “Header/dynamixel_k.h”
unsigned char PortCtrl = 0×00;
unsigned int SecFlag = 0, tim_count = 0;
unsigned int LeftObjectSpeed, RightObjectSpeed, LeftPresentSpeed, RightPresentSpeed;
unsigned int DutyA, DutyB;
unsigned int LeftEncoder = 0, RightEncoder = 0;
int RightOutput, LeftOutput, LeftBeforeError, RightBeforeError;
int LeftErrorSum = 0, RightErrorSum = 0;
int LeftError, RightError;
void StartDc(void)
{
if(twi_ch[2] == 1)//drive mode
{
BasicRobotArm();
PortCtrl = 0×00;
if(twi_ch[0] > 5)
{
LeftObjectSpeed = twi_ch[0] – 2;
PortCtrl |= 0×01;
}
else if (twi_ch[0] < 5)
{
LeftObjectSpeed = 8 – twi_ch[0];
PortCtrl |= 0×02;
}
else
{
LeftObjectSpeed = 0;
PortCtrl |= 0×01;
}
if(twi_ch[1] > 5)
{
RightObjectSpeed = twi_ch[1] – 2;
PortCtrl |= 0×04;
}
else if(twi_ch[1] < 5)
{
RightObjectSpeed = 8 – twi_ch[1];
PortCtrl |= 0×08;
}
else
{
RightObjectSpeed = 0;
PortCtrl |= 0×04;
}
}
else // mission perform mode
{
twi_ch[0] = 5;
twi_ch[1] = 5;
PortCtrl = 0×00;
}
if(SecFlag == 1)
{
__disable_interrupt();
LeftPresentSpeed = (LeftEncoder*312)/1000;
LeftError = LeftObjectSpeed – LeftPresentSpeed;
if(LeftError > 0)
{
/*LeftOutput = (58*LeftError)/100 + (500*(LeftError-LeftBeforeError))/100 + (10*LeftErrorSum)/100 ;*/
LeftOutput = (L_K_P*LeftError + L_K_D*(LeftError-LeftBeforeError)
+ L_K_I*LeftErrorSum)/SCALING_FACTOR;
DutyA += LeftOutput;
if(DutyA > 1000)
DutyA = 1000;
}
else if( LeftError < 0)
{
DutyA -= 5;
if(DutyA < 1)
DutyA = 0;
…
…
…
…
전체소스는 하단 pdf를 참고하시기 바랍니다.
참고문헌
· 열혈 TCP/IP 소켓 프로그래밍
· C# 5.0 프로그래밍
· 라즈베리파이
· AVR ATmega128 정복
· 닷넷 프로그래밍 정복
· 열혈 C프로그래밍
[33호]자가발전기구 GX-1
ICT 융합 프로젝트 공모전 입선
자가발전기구 GX-1
글 | 동양미래대학교 임종헌, 강정민, 권도황, 양단비, 최승연, 한소연
심사평
뉴티씨 생활 속에서 나올 수 있는 매우 간단한 발상이지만, 이를 직접 구현한다는 것은 또 다른 문제이다. 항상 쉬워 보이는 것도, 직접 만들어 보면 매우 어렵다. 이 때문에, 쉬워보이는 것을 구현하는 것이 의외로 어려운 일인데, 중간중간 어려운 과정 속에서도 잘 극복해 나간 팀원의 고민과 노력을 엿볼 수 있었다. 앞으로 이 팀원들이 사회에 나와서 실질적인 아이디어를 제품으로 구현해 가는 멋진 일을 상상해 보면서, 높은 점수를 준다.
칩센 자가 발전으로는 나와있는 제품들이 너무 다양하고 많으며, 실생활 어느 부분에서 적용이 가능한지에 대한 조사가 부족하다.
위드로봇 배터리로 구동하는 장비가 많아지는 현 상황에서 에너지 수집 장치의 필요성은 매우 높습니다. 아쉬운 점은 일반적인 모터를 활용하여 전력을 생성하는데 추가 아이디어가 있었어야 한다는 점과 에너지 저장 장치로 2차 전지가 아닌 슈퍼 캐패시터를 선택한 이유를 보고서에 명기하면 좋았겠다라는 생각을 해 봅니다.
작품개요
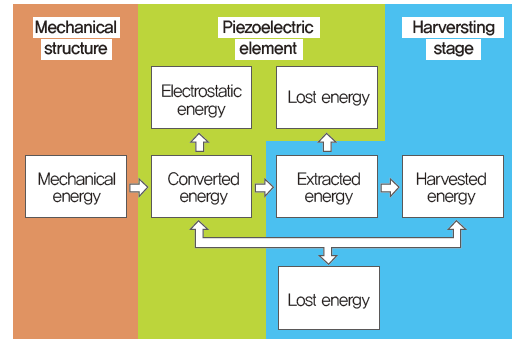
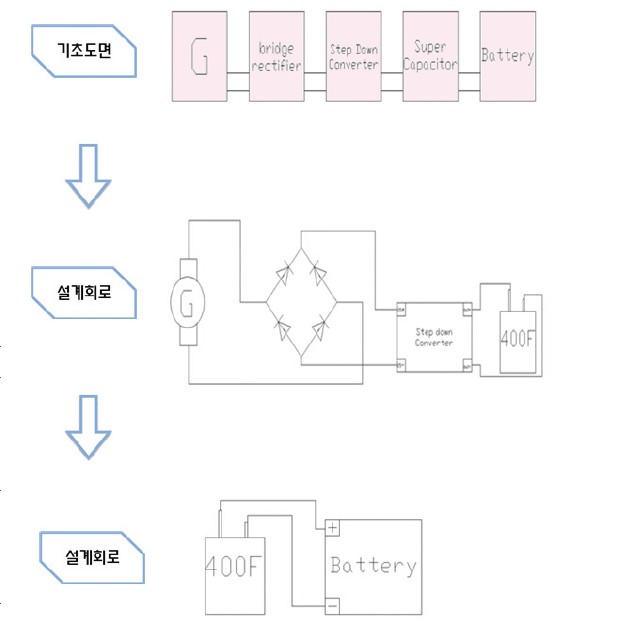
사람이 일상적으로 이용하는 운동 기구에 버려지는 에너지를 쓸모 있는 에너지로 만드는 ‘에너지 수확기술(Energy Harvesting)’을 접목시켜, 운동기구에 소용량 발전기 및 충전회로를 구성하여 오늘날 현대인의 대부분이 이용하는 휴대폰 충전을 가능하게 함으로써 별도의 가정용 전원 없이 충전할 수 있게 한다. 그리고 충전을 할 때 사람의 동력이 필요하다는 것을 이용하여서 사용자의 규칙적인 운동습관까지 기대할 수 있게 하는데 목적이 있다.
기존에 있던 자가발전기구와의 비교
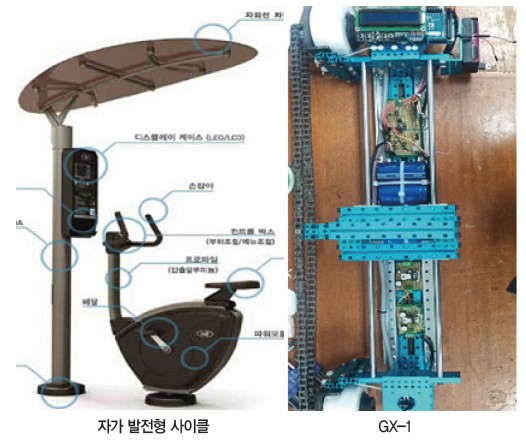
기존 운동기구는 규모가 커서 거치된 형식으로 이동성과 휴대성이 결여되어 있고 운동시간을 따로 투자해서 해야 하므로 바쁜 현대인으로서는 불규칙한 생활습관으로 운동시간을 따로 내기 어렵다는 단점이 있다.
또한, 사이클은 회전운동이기 때문에 다양한 운동기구에 접목하기 힘들다는 단점이 있다. 그러나 사진에서와 같이, 저희가 만든 GX-1은 휴대성이 있고 직선운동이기 때문에 현재 나와 있는 여러 다양한 기구에 접목시킬 수 있고 남자 여자 상관없이 다양한 연령층이 편리하게 이용할 수 있으며 충전된 용량을 LCD에 표시하여 운동 잔여량을 확인할 수 있다. 충전되는 전류를 제어하여 운동에 드는 힘을 조절 할 수 있어 다양한 연령층이 사용할 수 있도록 하였다.
작품설명
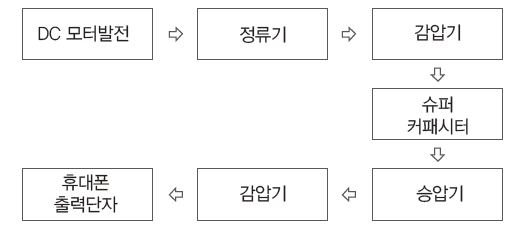
BLDC모터를 통해 나온 교류기전력을 다이오드 브릿지 회로로 정류하여 직류 기전력으로 변환하고, 그 기전력으로 Super Capacitor 4개를 직렬로 연결하여(100[F], 5.4[V]) 배터리를 충전시킨다. Step-Up 과 Step-Down converter를 두 개 모두 사용하는 이유는 Capacitor에서 나오는 전압이 약 3Volt~8Volt 사이인데, Battery에 충전하기 위한 적정전압이 5Volt 이므로 Step-Up converter 하나 만으로는 5Volt~8Volt구간에서 5Volt로 출력되지 않고 그대로 나오게 되어 문제가 발생한다. 그렇기 때문에 Step-Down converter를 사용하여 5Volt~8Volt구간에서의 전압을 5Volt로 강압시킨다. 따라서 Battery에 5Volt의 일정한 전압을 인가할 수 있게 된다.
부품설명

동작원리
승압기와 감압기 회로 및 설명
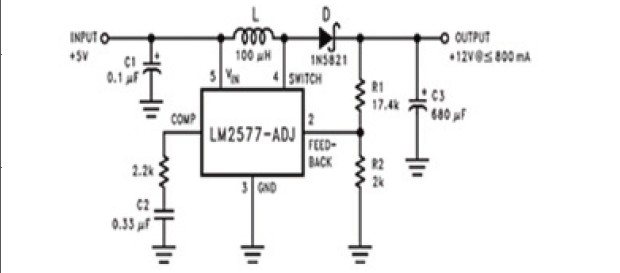
승압기 : 승압기 회로도에서는 input 5Volt라고 되어있지만 실험을 통해 3Volt이상부터 승압이 되는 것을 확인 할 수 있다.
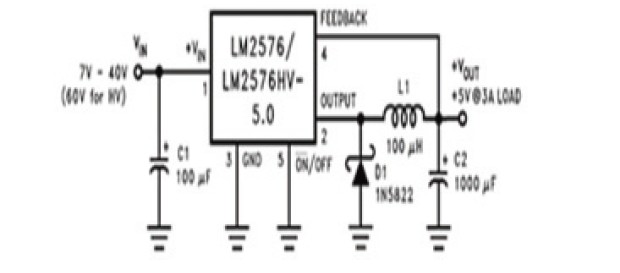
감압기 : 휴대폰을 충전하기 위한 전압은 5 Volt이기 때문에 승압기를 거쳐 출력된 12Volt전압을 5Volt전압으로 낮추기 위해 감압기를 사용하였다.
PWM(Pulse Width Modulation) 제어란?
구형파의 ON구간의 전체 파형 대비 비율을 조절하여 파형의 평균값을 조절하는 제어를 PWM(Pulse Width Modulation)제어라 한다. DC모터에선 이와 같이 PWM 제어를 이용하여 속도를 조절한다.
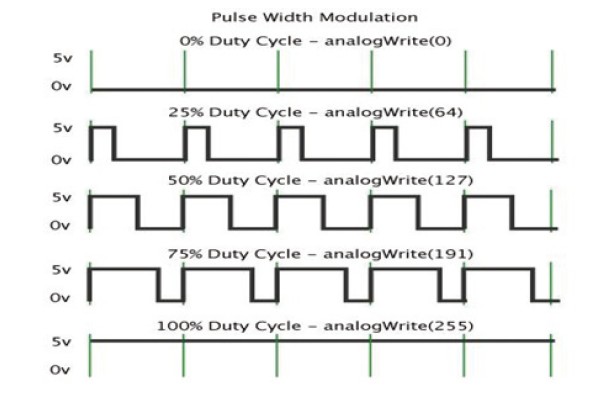
즉, PWM은 디지털기기에서 아날로그 결과를 얻기 위한 테크닉이다. 0 또는 1, on 또는 off의 수직파를 얻기 위해서 디지털 컨트롤을 이용하는데, 이 on-off 패턴으로 on이 지속되는 시간과 off가 지속되는 시간을 조정함으로써 on(5 Volt)과 off(0 Volt) 사이의 전압을 흉내낼 수 있다. 이 on이 지속되는 시간을 펄스 폭(Pulse Width Modulation)라고 한다. 이러한 on-off 패턴을 반복하여 LED에 출력하면 전압이 0~5 volt 사이의 값을 나타내며 LED의 밝기를 조절할 수 있다. PWM에서 전체 파형 대비 ON구간의 비율을 Duty라 칭하고, 0~100[%]로 표기한다. 위 그림의 파형은 Duty의 값에 따른 파형의 모습을 같은 시간 축 상에 나타낸 그래프이다. 본 작품에서는 다양한 연령층의 사용자가 모두 이용할 수 있도록 운동량의 강도를 조절하고자 PWM제어가 이용되었으며, 총 5단계로 나누어 전류를 조정하여 이를 실현하였다.
GX-1 메인 회로 및 설명
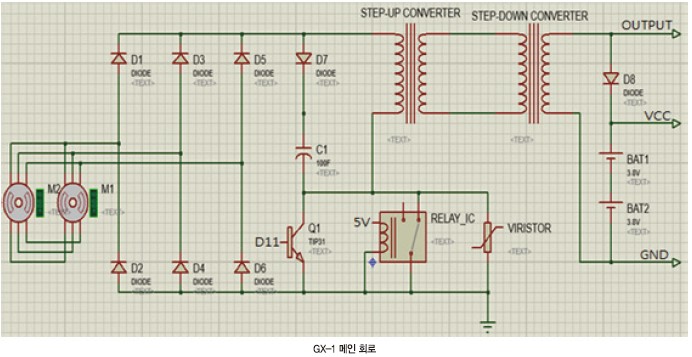
Main 기판의 특수적인 부분을 설명한다. 트랜지스터Q1을 쓰는 이유는 PWM 제어(D11핀)를 통해 커패시터에 흐르는 전류를 제한하여 운동할 때 드는 힘을 조절할 수 있게끔 하였다. BAT1, BAT2는 리튬폴리머 충전지를 사용하여 아두이노의 전원을 공급하기 위해 사용하였다.

릴레이IC의 b접점을 사용한 이유는 BAT1와 BAT2가 전부 소비되었을 때 Arduino가 켜지지 않아 Q1이 도통이 되지 않기 때문에 릴레이의 b접점을 이용하여 우선 BAT1과 BAT2를 충전시킬 수 있도록 만들기 위해서이다. 또한 IC릴레이에 병렬로 바리스터를 연결한 이유는 IC릴레이가 서지전압에 약하여 이를 방지하기 위해서이다.
제작과정
➊ 이론 계산
· 기준: S사 휴대폰 배터리 (3.8V, 2,100mA, 7.98Wh)
· [Wh]와 [J]간의 환산: 3.8×2100×10^-3×3600= 28,728[J]
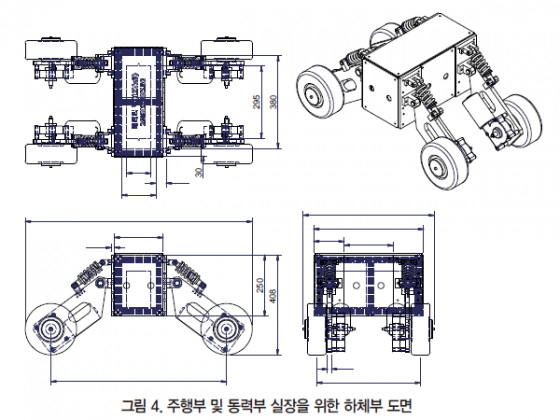
· 선정한 모터: 760[g], 33.27[W], 900[rpm], Φ92 (2대)
33.27×2×13×1800= 39,924[J] (300[rpm]의 운동 감안)
위의 에너지 계산을 토대로 용량이 적합한 BLDC 모터를 선정하였으며, 커패시터는 다음과 같이 선정하였다. 2.7[V] 400F 커패시터 – 4개 직렬연결: 내압 10.8[V], 100F의 충전회로를 구성하였다. 이론상 10.8[V]이지만, 충전실험을 한 결과 13.5[V]까지 커패시터의 팽창 및 과열 현상 없이 충전 가능함을 확인하였다.
13.5[V]까지 충전하였을 경우 저장되는 에너지:
{(13.5*13.5*100*0.5)-(3*3*100*0.5)}=8662.5[J]
이는 휴대폰 전체 용량의 약 30%에 달하며, 커패시터가 완전 충전 및 방전을 3회 하였을 경우 휴대폰 배터리가 완전 충전 된다.
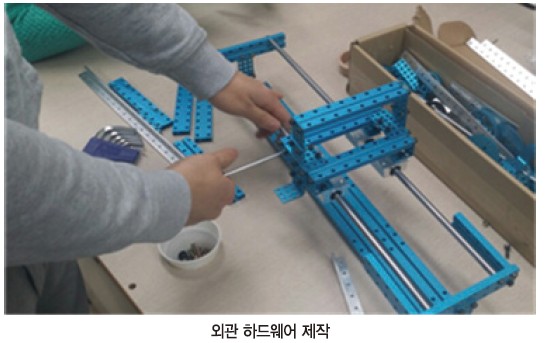
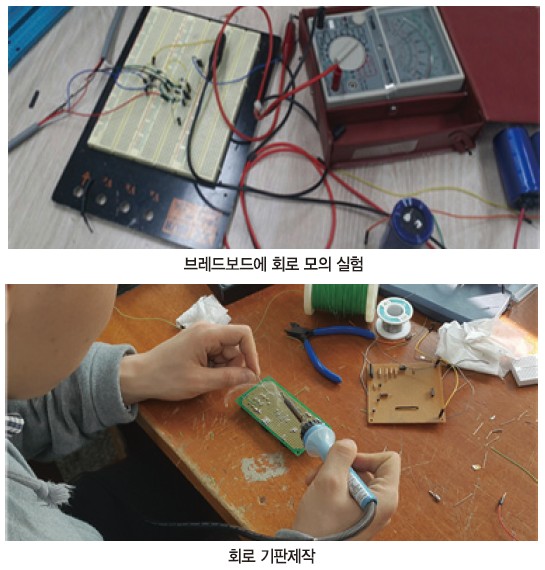
➋ 하드웨어 및 회로 기판 제작
앞서 나타나 있는 대로 회로를 제작하고 외관상의 하드웨어를 메이크 블록을 이용하여 제작하였다.
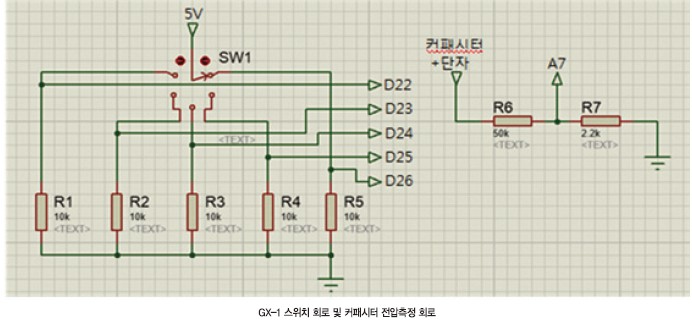
➌ 프로그램 제작
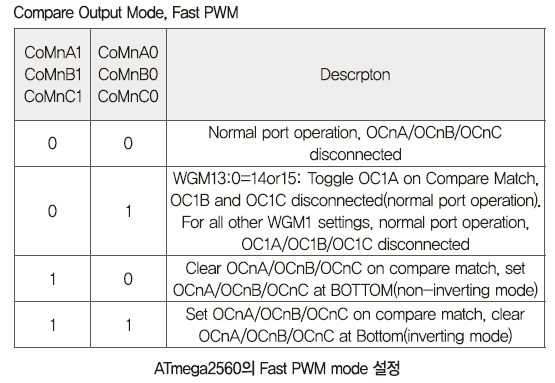
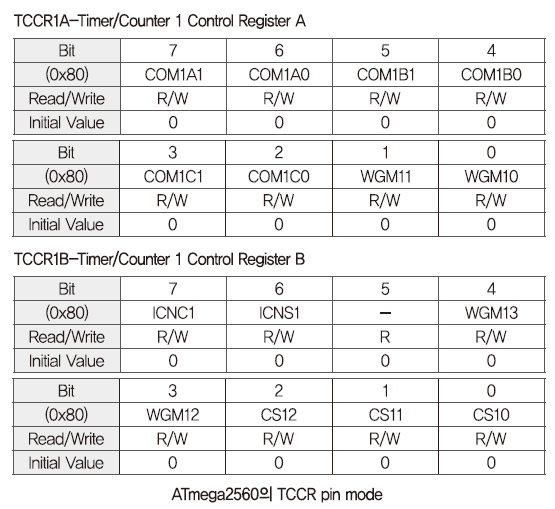
GX-1에 사용하는 아두이노는 Arduino Mega 2560이기 때문에 ATmega2560을 기반으로 프로그램이 구동된다. 따라서 ATmega2560에 맞는 프로그램을 구성하였다. 우선적으로 찾아야 하는 데이터는 분주비 및 모드설정이다. 이는 데이터 시트에 명시되어 있으며, 아래에 소개한다.
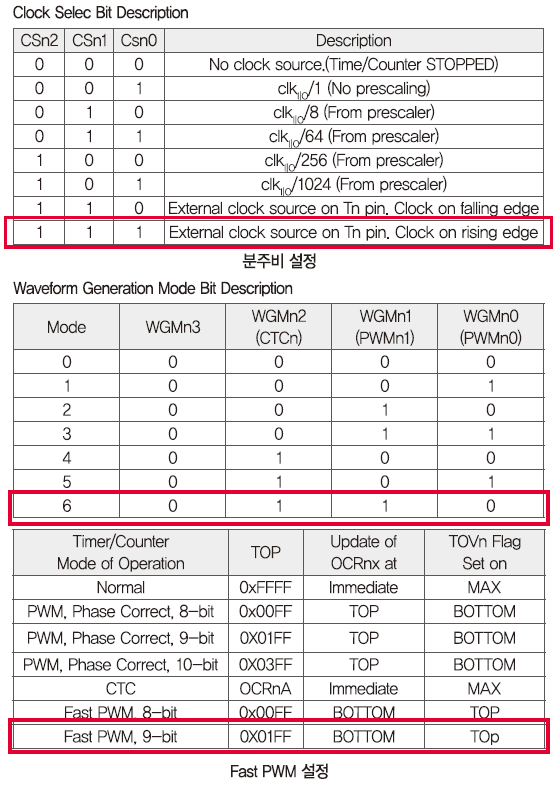
본 프로그램에는 Fast PWM 8비트 및 1분주비를 사용하였다. 또한, PWM의 모드도 설정해야 했다. 이 레지스터는 TCCR1A 및 TCCR1B에 있으며, 이는 아래에서 확인할 수 있다. 최종적으로 프로그램에 삽입한 구절은 아래와 같다.
TCCR1A = _BV(COM1A1) | _BV(WGM10);
TCCR1B = _BV(WGM12) | _BV(CS10);
그리고, 이를 토대로 한 프로그램의 동작절차 계략도는 다음과 같다.
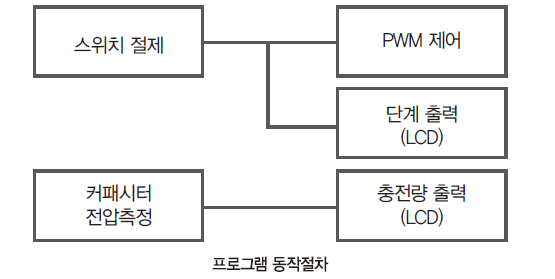
프로그램의 내용을 아래에 첨부한다.
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
int analogInput = 7;
float Energy = 0.0;
float vout = 0.0;
float vin = 0.0;
float R1 = 50900.0;
float R2 = 4370.0;
int value = 0;
int SW1 = 22;
int SW2 = 23;
int SW3 = 24;
int SW4 = 25;
int SW5 = 26;
int val1 = 0;
int val2 = 0;
int val3 = 0;
int val4 = 0;
int val5 = 0;
void setup()
{
// LCD 단자 입출력 설정
pinMode(13, OUTPUT);
pinMode(analogInput, INPUT);
//———————————-
// 단계 조절 스위치 입출력 설정
pinMode(11, OUTPUT);
pinMode(SW1, INPUT);
pinMode(SW2, INPUT);
pinMode(SW3, INPUT);
pinMode(SW4, INPUT);
pinMode(SW5, INPUT);
lcd.begin(16, 2);
}
void loop()
{
val1 = digitalRead(SW1);
val2 = digitalRead(SW2);
val3 = digitalRead(SW3);
val4 = digitalRead(SW4);
val5 = digitalRead(SW5);
value = analogRead(analogInput);
// LCD 출력 함수 계산식
vout = (value * 5.0) / 1024.0;
vin = vout / (R2/(R1+R2));
Energy = ((vin*vin*50)-(3*3*50))/8662.5*100; //((((vin*vin) * 400)) / 26000) * 100;
//————————————————-
// Fast PWM 설정
TCCR1A = _BV(COM1A1) | _BV(WGM10); //Fast PWM_8bit_Non_toggle_mode
TCCR1B = _BV(WGM12) | _BV(CS10); //(prescaler_1)
//(prescaler_1)___62.5k_(prescaler_8)___7.81k_(prescaler_64)___0.9kHz
//————————————————-
lcd.setCursor(2, 0);
lcd.print(“BAT=”); //lcd.print(“P=”);
lcd.print(Energy); //lcd.print(Energy);
lcd.print(“% “); //lcd.print(“%”);
if(val1 & !val2 & !val3 & !val4 & !val5)
{
OCR1A = 2.55; // 1%(2.55) 40(102)%
lcd.setCursor(2, 1);
lcd.print(“LEVEL=”);
lcd.print(1);
}
if(!val1 & val2 & !val3 & !val4 & !val5)
{
OCR1A = 107.1; //42%(107.1) 67%(171)
lcd.setCursor(2, 1);
lcd.print(“LEVEL=”);
lcd.print(2);
}
if(!val1 & !val2 & val3 & !val4 & !val5)
{
OCR1A = 183.6; //72%(183.6) 82%(209)
lcd.setCursor(2, 1);
lcd.print(“LEVEL=”);
lcd.print(3);
}
if(!val1 & !val2 & !val3 & val4 & !val5)
{
OCR1A = 229.5; //90%(229.5) 92%(235)
lcd.setCursor(2, 1);
lcd.print(“LEVEL=”);
lcd.print(4);
}
if(!val1 & !val2 & !val3 & !val4 & val5)
{
OCR1A = 255; //100%(255)
lcd.setCursor(2, 1);
lcd.print(“LEVEL=”);
lcd.print(5);
}
delay(500);
}
시행착오 및 수정사항
처음 작품을 구성하였을 때, 우리는 DC모터를 사용할 계획이었다. 그러나 출력 값을 확인해 본 결과 전력 값이 너무 작았다. 그래서 충분한 전력 값과 빠른 충전시간을 설정해주기 위해서 BLDC MOTOR 2개로 변경하였다. 모터의 개수가 늘어났기 때문에 자가 발전운동기구의 외관과 베어링을 좀 더 안정적으로 만들고, 체인의 길이를 늘였다.
다음으로 슈퍼 커패시터 8개를 병렬로 연결하여 충전량을 확인하였다. 그런데 정전용량 값이 너무 커서 충전 및 방전하는데 있어서 너무 효율이 떨어진다고 생각되어 커패시터를 4개만 사용하여 용량을 줄였다. 그리고 슈퍼 커패시터를 단단하게 고정시키기 위해서 지지대를 설치했다.
마이크로 컨트롤러 부분인 Arduino의 전원을 연결하기 위해서 반도체릴레이를 사용하였다. 그러나 PWM의 Duty값이 낮아지면, 운동을 하고 나온 출력에 서지전압이 발생하여 반도체릴레이가 손상되는 문제점이 발견되었기 때문에, 서지전압을 억제하기 위해 VARISTOR를 사용하였다. 아두이노의 reference를 확인하면서 우리가 구성한 작품의 알맞은 분주비 코드를 찾고, 설정하는 데에 있어서 몇 번의 실패가 있었지만 여러 번의 노력 끝에 정확한 동작을 얻을 수 있었다.
[33호]2mm 두께의 Metal plate에서도 가능한 새로운 터치 기술 소개

2mm 두께의 Metal plate에서도
가능한 새로운 터치 기술 소개
Strain & impedance 변화를 적용한 메탈 터치 기술
Touch Interface는 지난 10여년 간 비약적인 발전을 거듭하여 이제는 User Interface 측면에서 빼놓을 수 없는 부분으로 우리 생활에 자리 잡고 있다. Smart Phone, Tablet, Navigation, 각종 가전제품에 전반적으로 적용되어 있으며, 앞으로도 지속적으로 사용될 것이다. 현재 우리가 사용하고 있는 Touch Interface에 적용 중인 Touch 방식은 정전용량 방식으로서 제품의 표면 재질이 가지고 있는 고유의 정전용량 값의 변화를 측정하여 동작하게 하는 방식이다. 이러한 정전용량 방식의 Touch Sensing은 표면 재질의 구성성분에 따라 제작에 많은 제약이 따른다는 단점을 보유하고 있다. 그 단점 중에 가장 취약한 부분은 금속성분이 포함된 재질에는 적용이 불가하다는 데 있다. 현재 각종 가전제품 및 Home Security system 등의 내구성이 필요한 application에는 제품 외관에 Metal 혹은 Steel 재질을 적용하고자 하는 수요가 늘어나고 있다.
오랜 기간 Touch sensor 개발 및 생산에 주력한 ㈜우정하이텍은 Metal Touch의 수요 증가를 일찌감치 예상, 2년간의 연구개발을 통해 Metal plate에도 정전용량 방식 터치와 같은 동작을 구현하는 기술을 확보하여 상용화에 성공하였다. 현재까지 시장에는 정전용량방식 외 세라믹을 활용한 Piezo 압력방식으로 터치를 구현한 제품이 몇 종류 있는데, 이 경우 센서 주위 구조물이 복잡하고 진동이나 외부에서 유입되는 이상신호(Radiation Noise)에 취약한 점 또 Multi-key(2개 이상의 키를 한꺼번에 동작시키는 기능) 동작 불가, Long time touch(key 눌림 동작을 일정 시간 유지 기능) 구현 불가능 등 기술적으로 한계가 있고 또 제작 비용 또한 부담이 되어 본격 도입에 어려움이 있는 것으로 확인되고 있다.
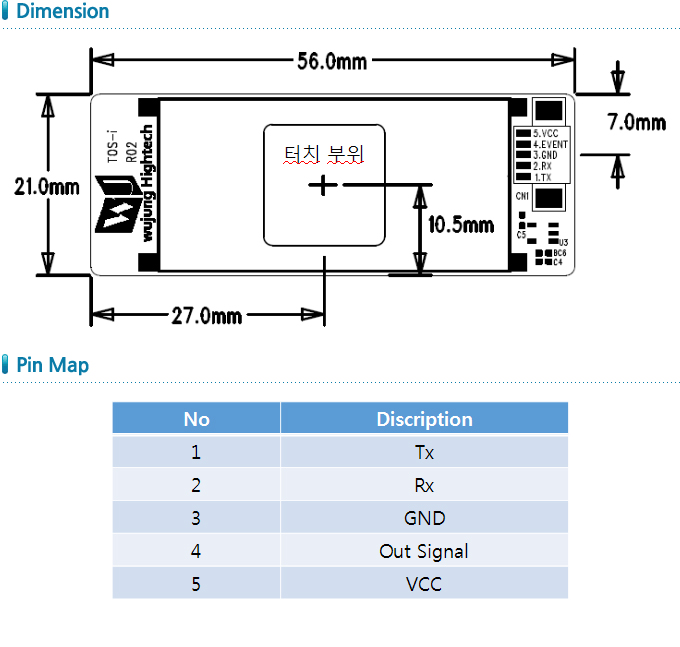
반면 ㈜우정하이텍이 개발한 Metal Touch 기술은 Piezo효과를 이용하되 Strain과 초음파 임피던스(impedance) 변화를 동시에 감지하고 그 결과 값을 조합하여 2mm 두께의 Metal plate에서도 User의 Touch를 감지하는 신기술이다.
 |
 |
간단히 설명하면 Piezo film을 이용하여 Metal plate에 양면테이프를 이용하여 쉽게 부착하고 Piezo effect 즉, 압전 효과에 의한 변화 중 Plate의 Strain 감지와 임피던스의 변화를 감지하는 방식으로 나눌 수 있다. 사용자의 제품 요구 사양에 따라 Strain 변화를 주요인으로 적용하여 좀 더 안정적인 터치를 구현하게 할 수도 있고 또한 임피던스 변화를 주요인으로 적용하여 안정성보다는 상대적으로 빠른 반응 속도 및 부드러운 Touch 감도 등에 Focusing하여 적용할 수 있는 등, 기술 적용성에 대한 선택폭이 넓다는 것도 장점으로 꼽을 수 있다. 또한 Design 측면에서의 장점은 Touch를 적용하고자하는 부분이 곡면 등 평면이 아닌 곳에도 쉽게 사용이 가능하다는 것이고 더불어 멀티 키, 롱 키, 드래그(drag) 기능, 휠(wheel) 기능 등 핸드폰에 있는 거의 모든 기능 구현이 가능하다는 점과 제품 적용 시 조립 공정이 상대적으로 단순하여 공정상에서 발생하는 비용을 감소시킬 수 있다는 점 또한 장점이다.
2003년 3월 설립된 ㈜우정하이텍은 벤처기업으로 정전용량 터치 기술 개발에 집중하여 다양한 알고리즘을 보유하고 있으며 터치 버튼 위주로 가전제품(냉장고, 에어컨, 제습기, 전기 밥솥 등)에 공급 중이고 습도센서, 수위센서, Metal touch 제품을 꾸준히 출시하여 사업을 확대 중이며 현재 직원은 25명, 매출은 2014년 65억, 본사와 공장은 경기도 성남 하이테크밸리에 소재하고 있으며 경상남도 창원에 지사를 보유하고 있다.


TEL. 031-736-0162
www.wujunghightech.com