
장애물 극복 및 정찰용 로봇인 AstroBoyS가 뉴스에 소개되었네요^^
최근 인천에서는 인천 로봇랜드 착공식이 열렸는데요. 저희 연구소의 로봇도 몇 몇이 전시를 했답니다. 황송스럽게도 메인이벤트에 포함되어서 두 대가 시연을 했네요^^. 그런데 그 장면이 SBS 뉴스에 살짝 노출이 되었답니다. 물론 아주 살짝입니다만^^
장애물 극복 및 정찰용 특수 목적 로봇으로 AstroBoyS라는 프로젝트 이름을 가지고 있습니다.
흠… 요런 사진을 올려서 아나운서분께 죄송하네요^^
플리퍼형 로봇은 계단이나 무너진 건물 더미같은 장애물을 손쉽게 극복하기 위해 고안되었습니다.
그 뒤에 6WD위에 또한 총기와 카메라를 장착해서 적 혹은 타켓을 타격하는 용도이구요.
식전행사에서는 모두 명중시켰는데 정작 본식에서는 이게 진짜총이 아니다보니 약간 미스가 있었어요^^
이번 제품은 플리퍼에 또 궤도를 감은 형태입니다. 이제 몇일후 이 플리퍼형 로봇은 궤도가 있는 형태와 없는 형태가 각각 디바이스마트를 통해 판매를 시작하게 된답니다.
이…

지능형 무인 자동차 연구에 적합한 STELLA eCARv1
저희 STELLA 시리즈는 지능형 로봇을 연구하시는데 많은 도움이 되는 플랫폼을 공급하는 시리즈입니다. STELLAB B2로 소형 플랫폼을 공급했다면, 이번에 STELLA eCARv1으로 대형 탑승형 로봇 플랫폼을 공급하고자 합니다. 저희는 꽤 오래전부터 지능형 탑승형 로봇에 관심을 가졌었는데요.
비록 아직 상용화 단계는 아니지만, GPS와 카메라 등을 이용하여 위와 같은 형태의 완성차를 만들어 테스트를 했었습니다. 언젠간 위 차량도 판매할 만큼이 되면 좋겠네요…
그후에
위 모델처럼 일반적인 골프차를 개조한 형태로 테스트를 수행했습니다. 왜냐구요? 골프차는 완성차이니 가격이 싸거든요. 그러니 좋은 판매가격을 가질 수 있다고 생각했던 겁니다.
그러다가 드디어 위 그림처럼 깔끔하고 이쁜 골프차를 자율 주행용 플랫폼으로 공급할 수 있게 되었습니다.^^.
일단 기본적으로, 핸들에 절대엔코더와 조향모터를 장착하여 핸들을 사용자가 통신을 통해 제어할 수…

탑승형 자율주행 알고리즘을 테스트할 플랫폼을 찾으신다면…
저희가 예전에 STELLA B2라는 제품을 출시했었습니다.[관련글바로가기] 이 때 STELLA B2는 자체로는 그냥 주행하는 기능을 가지고 있었습니다. 그래서 사용자가 자신의 PC든 혹은 자신이 만든 MCU든지 뭔가를 이용해서 저희 STELLA B2와 통신을 할 수 있도록 한 것입니다. 예를 들어 STELLA B2한테 앞으로 얼마만큼 가, 혹은 얼마의 속도가.. 이런 명령을 내리고, 또 STELLA B2한테서는 현재의 엔코더 값등을 받아오는 기능을 가지고 있었는데요. 이런 플랫폼을 이용해서 사용자는 자신이 테스트하고자하는 것을 수행할 수 있도록 하는 것입니다.
이번에 저희는 STELLA eCARv1을 곧 출시할 예정인데요. 쉽게 말하면, 자율주행 알고리즘 같은 것을 테스트하실 분들이 사용하면 좋으실 겁니다.
이미 디바이스마트를 통해 판매하고 있는 골프차[판매페이지 ]를 이용해서 자율주행에 맞게 제작을 한 것입니다. 먼저…

다목적 주행로봇 AstroBoyS 테스트
벌써 저희 회사가 있는 인천에도 벗꽃이 피었어요^^. 이런날은 야외로 개발중인 제품을 들고 테스트하면 기분이 아주 상쾌하죠^^ 요즘 저희는 AstroBoyS 라는 시리즈 명으로 다수의 로봇을 동시 개발 출시를 앞두고 있는데요. 오늘도 그 실험 동영상을 보여드릴까해요…^^
바로 이 아이들입니다. 요 아이들 중 앞에 있는 플리퍼가 달린 아이와 메카넘휠을 빼고는 한번 소개를 해 드렸었어요
이때는 인천의 송도까지 가서 테스트를 했었죠.^^[관련글]
이번에는 그때의 글과 합쳐서 일목 요연하게 성능을 보여드릴께요. 아직은 좀 더 보강해야합니다만, 그래도 언능언능 출시하고 싶네요^^
AstroBoyS시리즈를 줄여서 ABS라고 저희는 명명했습니다. 그래서 이 모델은 로봇의 자세를 안정화하는 플리퍼(flipper)가 달려있어서 ABS FT라는 이름입니다. 확장하면 AstroBoyS 시리즈 중 Flipper가 달린 Track 구동형 로봇이죠.^^
동영상을 보시면, 이 플리퍼를 이용해서…

험난한 지형에 딱 맞는 주행로봇 AstroBoyS 시리즈 테스트 中
인천 송도의 한 허허벌판(^^)입니다. 몇일전 저희 연구소 연구원 몇몇이 여길 방문했습니다.
뭔가 일이 벌어질것 같죠? ㅎ^^
여기서 저희는 최근 개발중인 AstroBoyS 시리즈 총 6종 중에서 무려 4종을 필드 테스트를 했습니다.
바로 위풍도 당당한 이 아이들이지요. 저중에 빨간 바퀴는 이전에 한 번 테스트를 했었구요[바로가기] 이번에는 좀 많이 가지고 나갔습니다.
이렇게 테스트를 강하게 수행했거든요^^
뭐.. 뭔말이 필요하겠습니까? 동영상하나로 끝내겠습니다. 언능언능 나머지 작업과 더 까칠한 테스트를 거쳐서 상용품으로 사용자들과 만나고 싶습니다.^^

험난한 지형에 딱 맞는 주행로봇 AstroBoyS 테스트 中
안녕하세요 엔티렉스 연구소입니다. 요즘 저희가 AstroBoyS 출시를 앞두고 있는데요. 한참 내부에 들어갈 여러 기능들을 탑재 중입니다. AstroBoyS에는 4종의 라인업이 있는데 그 중 오늘은 살짝 6WD 타입의 아이를 맛만 보여드릴까합니다. 오늘 테스트한 따끈따끈한 아이에요.
그 전에 저희는 현재 상당히 우수한 기능의 모터제어기를 개발중인데요. 이번 모터 제어기의 성능을 올리면서 하나의 다른 라인업으로 주행로봇용에 사용될 2채널짜리 모터드라이버도 개발중입니다. 이 모터 제어기를 사용하면 아주 괜찮게 주행로봇들을 세팅할 수 있습니다. 모터제어기가 출시되기 전에 주행로봇들을 하나하나 대상으로 적용하면서 성능을 테스트하게 되는데요. 아마 조만간 모터제어기와 그 모터제어기를 사용한 주행로봇들을 하나하나 보여드릴 수 있을 것 같습니다.
일단 이번에 테스트한 것은 실외에서 험난한 지형을 운전할 수 있는 능력에 포커스가 맞춰져 있습니다….

메카넘 휠 NT-MECANUM 시리즈
아마 국내에서 메카넘 휠 솔루션을 판매하는 유일한 곳이 저희 엔티렉스일겁니다. 그리고, 또한 메카넘 휠 구매관련 문의를 할 만한 국내 업체도 유일하게 저희가 아닐까 합니다.^^. 이번에 소개해 드릴 제품은 메카넘 휠.. 음.. 그냥 바퀴만^^ 소개해드릴까합니다. 일단, 메카넘휠의 원리[관련글바로가기]떄문에 일반바퀴랑 달리 메카넘휠은 꼭 4개씩 구매를 해야합니다. 오른쪽 바퀴용과 왼쪽 바퀴용이 다르기 때문입니다. 이 글에서 소개하는 제품은 1SET가 모두 두 개의 왼쪽, 두개의 오른쪽 용 바퀴로 총 4개로 구성되어 있는 겁니다.
일반적인 모터에 바로 연결할 수 있는 메카넘휠 1set입니다. 외형은
입니다.
실제 장착될때는 위와 같이 장착됩니다.
위에서 소개한 휠에서 모터에 바로 연결되는 것이 아니라, 별도의 브라켓을 추가해서 체인으로 연결할 수 있도록 설계된 메카넘 휠입니다.
위 그림처럼 연결이 가능합니다.
모터직결형…

주행로봇. NT-Giant I, NT-Giant II, NT-TriWheel
이번에 소개해 드릴 것은 정말 큰 주행로봇입니다. 사람이 탑승해도 괜찮을 정도의 힘과 크기를 가지고 있으며, 용도에 따라서는 실외환경에서도 충분히 기능을 할 수 있습니다.
딱 사진만 봐도 꽤 크다는 느낌을 받으실텐데요^^
NT-Giant I은 NT-BiWheel 두 개를 붙여 만든 NT-4WDWheel[바로가기] 위에 다양한 용도로 사용하실 수 있게 상판을 결합한 것입니다. 엔코더 내장형 모터의 사양은 NT-4WDWheel과 동일합니다.
방금 보신 NT-Giat I의 상판을 좀 더 활용도를 높인 것이 NT-Giant II입니다. 이 제품은 기구부와 모터만 판매되는 제품입니다. 저희가 꾸민 구동 동영상을 한 번 확인해 보시죠
이 제품도 기구부와 모터만 판매되는 제품입니다.
그리고, NT-BiWheel [바로가기]에서 앞에 보조바퀴를 채용하고 케이스를 입힌 모델도 있습니다. 바로 NT-TriWheel인데요.
이렇습니다. 모터 4개를 구동하는데 약간 부담을 느끼신다면 NT-TriWheel도 추천해 드립니다.

세그웨이를 직접 만들고 싶으시다면, NT-BiWheel, NT-BiWheel-상판손잡이, NT-4WDWheel
2000년 쯤에 세상에 나온 세그웨이는 지금까지도 꽤 흥미로운 1이니 탐승로봇입니다. 뭐 세그웨이를 인수한 사장이 오프로드형 세그웨이를 타다가 사고로 사망했다는 아이러니한 로봇이기도 하구요. 학생레벨에서 이 세그웨이를 직접 만들고 싶어하는 분들이 많으신데요. 기구부 제작에 어려움을 겪는 분들을 위해 저희가 제품을 출시했습니다.
요렇게 생긴 NT-BiWheel입니다. 몸체프레임에 300W DC모터 2개, 엔코더 포함 입니다.
포함되어있는 국산 모터이구요.
모터의 사양입니다. 기어비는 20:1입니다.
전체 치수는 위 그림과 같습니다.
이 상태에서
NT-BiWheel-상판손잡이 를 장착하시면
쉽게 세그웨이처럼 만드실 수 있습니다.
상판손잡이의 치수구요.
여기서 세그웨이랑은 관련이 없지만, 위의 NT-BiWheel을 두개를 연결해서 별도의 주행로봇을 제작할 수 있도록 되어있습니다.
바로 NT-4WDWheel입니다. 모터나 바퀴는 NT-BiWheel과 같습니다.
연결부가 다시 탑재되어서 크기는 두개를 합친것보다는 약간 더 큽니다.
재미있는 로봇을 만드는데 도움이 되기를 바랍니다.^^
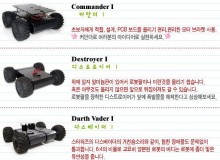
주행로봇 3총사 : NT-Commander I, NT-Destroyer I, NT-DarthVader I
위에 보시다시피 저희 제품군 중에 주행로봇 3총사가 있습니다. 다들 비슷하게 생겼는데, 조금씩 차이가 있어요.^^.
가장 기본이 되는 것이 Commander입니다. 사용자의 PCB기판을 올리기 편하게 되어있죠.
이건… 기구구성에 좀 더 자유도를 준 모양입니다. 여기서 자유도가 높다는건… 사용자가 좀 더 많이 편집할 수 있다는 거죠^^


