모바일 로봇 / 모바일 플랫폼 – STELLA B2

저희 연구소에서는 모바일 플랫폼이라는 제품군으로 STELLA 시리즈를 출시했었습니다. 처음에는 B1을 출시했고, 조금 펌웨어를 수정해서 B2를 출시했습니다.
동급 제품보다 아주 좋은 가격대를 제시할 수 있었는데요. 이 제품은 사용자의 MCU나 PC와 연결해서 각 종 주행명령을 인가하는 제품입니다. 그로부터 주행하는 로봇을 대상으로 사용자가 원하는 실험 혹은 움직임을 실험할 수 있는 제품입니다.
기본형의 모습입니다. 노트북하나를 올려다 놓고 사용하시기에 아주 적합한 형태입니다. 무선이든 유선이든 저희 메인 보드에 시리얼통신 연결을 하시고, 사용하시면 됩니다. 그림에 B1이라고 되어있지만, B2모델과 외형은 바뀌지 않았기 때문에 문제 없습니다.
더불어 상판의 형태는 옵션선택을 통해 다양한 길이로 선택하실 수 있습니다.
이렇게 3종의 옵션을 선택하실 수 있습니다. 이를 통해 연구목적이나 혹은 학습용으로 사용하실때, 각종 센서나 보드의 추가가 용이하실겁니다.
여러…
험난한 지형에 딱 맞는 주행로봇 AstroBoyS 테스트 中

안녕하세요 엔티렉스 연구소입니다. 요즘 저희가 AstroBoyS 출시를 앞두고 있는데요. 한참 내부에 들어갈 여러 기능들을 탑재 중입니다. AstroBoyS에는 4종의 라인업이 있는데 그 중 오늘은 살짝 6WD 타입의 아이를 맛만 보여드릴까합니다. 오늘 테스트한 따끈따끈한 아이에요.
그 전에 저희는 현재 상당히 우수한 기능의 모터제어기를 개발중인데요. 이번 모터 제어기의 성능을 올리면서 하나의 다른 라인업으로 주행로봇용에 사용될 2채널짜리 모터드라이버도 개발중입니다. 이 모터 제어기를 사용하면 아주 괜찮게 주행로봇들을 세팅할 수 있습니다. 모터제어기가 출시되기 전에 주행로봇들을 하나하나 대상으로 적용하면서 성능을 테스트하게 되는데요. 아마 조만간 모터제어기와 그 모터제어기를 사용한 주행로봇들을 하나하나 보여드릴 수 있을 것 같습니다.
일단 이번에 테스트한 것은 실외에서 험난한 지형을 운전할 수 있는 능력에 포커스가 맞춰져 있습니다….
NT-ARSv1 절대 각도를 얻는 센서
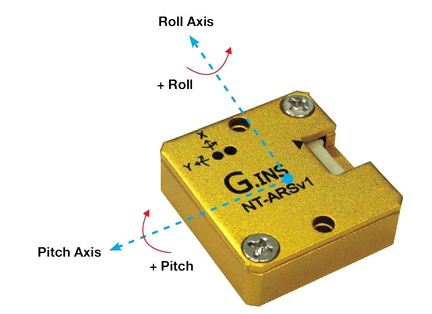
공간상에서 물체의 기울어진 각도, 기울기를 측정하고 싶으시다면, 저희의 NT-ARSv1을 추천합니다. 저가의 MEMS형 자이로센서와 가속도센서를 융합하여 2축 각도를 측정하도록 설계가 되었습니다.
각도를 측정할 만한 센서들은 많이 있습니다. 그중에서 자이로센서와 가속도센서가 많이 이용되는데요. 왜 이 둘을 융합해야할까요. 만약 고급의 고가의 센서를 사용한다면 문제는 없습니다. 그러나 저가의 MEMS형 센서를 사용한다면, 자이로나 가속도세서를 하나만 사용해서는 문제가 생깁니다.
자이로센서를 이용하는 경우는 적분이라는 문제가 생깁니다. 자이로센서의 출력은 각속도이기떄문에 각도를 얻기 위해서는 적분해야하거든요. 문제는 이 적분이 그리 아름답지 않다는 것이 문제입니다. 작은 오차라도 적분이 시작되면, 이후 결과에 누적으로 영향을 미치기 때문입니다. [관련글]
가속도센서를 사용하는 경우 자이로처럼 적분에 대한 부담은 없습니다. 그러나, 가속도센서가 회전중심충에서 직선방향으로는 움직이지 않아야한다는 전제가 필요합니다. 만약 가속도센서가…
메카넘 휠 NT-MECANUM 시리즈
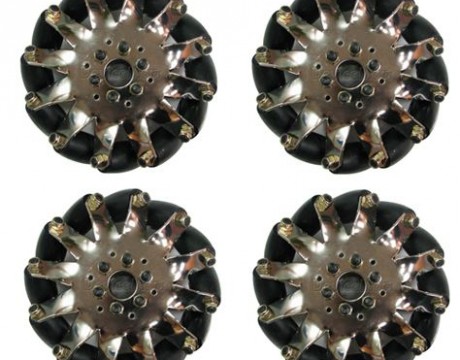
아마 국내에서 메카넘 휠 솔루션을 판매하는 유일한 곳이 저희 엔티렉스일겁니다. 그리고, 또한 메카넘 휠 구매관련 문의를 할 만한 국내 업체도 유일하게 저희가 아닐까 합니다.^^. 이번에 소개해 드릴 제품은 메카넘 휠.. 음.. 그냥 바퀴만^^ 소개해드릴까합니다. 일단, 메카넘휠의 원리[관련글바로가기]떄문에 일반바퀴랑 달리 메카넘휠은 꼭 4개씩 구매를 해야합니다. 오른쪽 바퀴용과 왼쪽 바퀴용이 다르기 때문입니다. 이 글에서 소개하는 제품은 1SET가 모두 두 개의 왼쪽, 두개의 오른쪽 용 바퀴로 총 4개로 구성되어 있는 겁니다.
일반적인 모터에 바로 연결할 수 있는 메카넘휠 1set입니다. 외형은
입니다.
실제 장착될때는 위와 같이 장착됩니다.
위에서 소개한 휠에서 모터에 바로 연결되는 것이 아니라, 별도의 브라켓을 추가해서 체인으로 연결할 수 있도록 설계된 메카넘 휠입니다.
위 그림처럼 연결이 가능합니다.
모터직결형…
전방향 이동이 가능한 메카넘 휠 (Mecanum Wheel)

일반적인 바퀴가 아니라 다양한 움직임을 인가하도록 만들어진 바퀴입니다.
위와 같이 회전하는 바퀴에 다시 아이들롤러가 비스듬이 결합된 형태인데요. 이렇게 되면 바퀴가 회전할때 진행 방향은
위에 보이듯이 화살표처럼 대각선 방향이 됩니다. (그림이 보이는 쪽이 바닥). 이 바퀴 네 개를 연결하면
각 바퀴의 대각선 방향의 합 벡터의 방향으로 물체는 움직이게 됩니다. 위와같이 기울어진 방향이 서로 다른 것을 마주 보도록 장착하고, 한 방향으로 모두 회전 시키면, 전진하게 되죠.
메카넘 휠의 가장 큰 장점은 그대로 수평방향이동이 가능하다는 것입니다.
위와 같이 바퀴를 돌려면 방향전환없이 바로 이동이 가능합니다. 실제 이동 모습을 동영상으로 보시죠
위 동영상의 모습은 메카넘휠을 채택한 플랫폼입니다.
DC 모터 구동에 필요한 드라이버 제품군

저희 연구소에서 기존에 판매하고 있던 DC 모터 드라이버 제품군을 알려드릴려고 합니다. 본 제품의 기획의도는 합리적인 가격에 고급제어기가 꼭 필요하지 않으신 분들께 드리는 솔루션이었습니다.
본 DC 모터 시리즈는 총 4종으로 위에 보시듯이 7V부터 36V까지 구동 전압에서 최대연속전류 30A급 모터 드라이버까지 포함되어 있습니다. 단순히 PWM과 방향신호를 통해 모터를 구동하는 1ch짜리 드라이버부터, RC / Joystick, I2C나 CAN통신을 통해 명령을 내릴 수 있는 모델까지 있습니다. 구동자체에 목적이 있으면서, 속도나 토크, 위치제어등 고가의 성능이 필요치 않은 분들께서 꽤 유용할 거라고 생각합니다.
본 모델은 아주 심플한 기능에 딱 맞는 크기를 가진 제품입니다.
위 그림의 핀맵처럼 방향신호와 PWM신호를 가지고 하나의 모터를 구동하는 드라이버입니다. 원칩형 드라이버들이 가지지 못하는 높은 구동전압과 구동전류를…
스탭모터 드라이버 제품군

이번에 소개해 드릴 제품은 스탭모터 드라이버 제품군입니다.
위 표와 같이 바이폴라방식과 유니폴라방식 두 종류가 있으며, 바이폴라방식은 다시 구동전류 기준으로 6A등급까지 있습니다.
특히 모든 제품이 동급 비교 최저가이면서도 성능은 결코 뒤지지 않는 사양을 가지고 있습니다. 모든 제품이 최대 16배까지 마이크로 스탭핑을 지원합니다.
바이폴라와 유니폴라모터의 차이는 [바로가기]에서 확인하실 수 있습니다.

로봇 암 NT-RobotARM-RC

소형 로봇 암입니다. 소형이고, 일반적인 RC 서보 모터를 사용하기 때문에 큰 힘을 내지는 못하지만, 학습용이나 각 종 이벤트로는 괜찮을 듯 합니다.
먼저 위 로봇암은 NT-RobotARM-RC로, RC서보모터 6개와 6개의 서보모터 동작을 위해 NT-SERVO-16CH-1[판매페이지바로가기], NT-USB2UART[관련글바로가기]를 포함하고 있습니다. 이 제품은 학생들의 학습용도의 사용을 위해 완성품과 조립품으로 각각 판매되는 제품입니다. 물론 나머지 제어코드는 사용자가 직접 MCU를 이용해 꾸미도록 되어있습니다.
NT-RobotARM-Motion-Frame입니다. 이 기구는 큰 힘을 받는 부분이 아니라, 상대적으로 단촐하게 꾸며져 있어요
그리고, 이 모델은 그냥 조립형으로만 판매되고 있습니다.
그리고, 또, 별도로, 로봇암의 끝단의 Gripper만 판매하기도 하는데요.
이 부분은 꼭 로봇 암이 아니라 학생들이 많이 자작하는 소형 주행로봇의 끝단에 장착해서 많은 응용분야가 있을것같아 별도 판매를 하고 있습니다.
저희 로봇-암을 주행로봇 3총사…
레이저가공(Laser) 절단 절곡 DIY(프로파일) 가공 활용 하기

비철금속 판재 레이저절단 절곡 가공을 통하여 안전 가이드를 만들어 보도록 하겠습니다. 가공 후 날카로운 모서리 부분을 가리면서 동시에 포인트 를 줄수 있는 가공을 예로


