
AstroBoyS 6WD 총기 장착 테스트
이미 최근에 강인한 주행 성능을 가진 AstroBoyS 시리즈를 테스트하는 장면을 보여드렸었는데요.[바로가기] 이번에는 그 AstroBoyS 중에서 6WD 모델에 총기를 장착해서 테스트하는 장면을 보여 드릴까 합니다.
저렇게 늠름하게 생겼는데요. 그냥 BB판 총- 당연히 저희는 진짜 총은 달 수가 없으니까요^^-을 장착했습니다. 그러나 무시하시면 안됩니다. 엄청 쌘 놈이거든요. 그리고, 총알 방수형 무선 카메라와 wifi에 대응하는 야간 촬영도 가능한 감시용 카메라, 그리고 사격 조종용 레이져 포인트를 장착한 형태의 군사형 로봇의 컨셉으로 테스트를 했습니다.
이것이 총구의 각도를 조절하는 거구요.
특수한 총이 아니라, 일반적인 총에 다 사용할 수 있도록 방아쇠를 당기는 장비를 또한 설치했습니다.
영점을 맞추고 무선에서 방아쇠를 당길 수 있어요. 그 결과입니다. 괜찮죠?^^
뭐 길게 적어봐야 뭐하겠습니까^^ 살짝 동영상 한 번…

Joystick을 이용한 AstroBoyS Mecanum platform Ⅱ/Ⅲ 구동
안녕하세요.
오늘은 저희의 주행로봇 제품인 Mecanum PlatformⅡ/Ⅲ에 조이스틱을 연결하여 구동시켜보려합니다.
Mecanum Platform은 기본적으로 RC조종기와 함께 판매되고있는데요.
혹시나 RC조종기가 아닌 내가직접 만든 조이스틱을 사용하여 Mecanum Platform을 구동시키고 싶다!!
하시는 분들을 위해 사용방법을 알려드리려고 합니다 .
물론 , 조이스틱은 기본 구성품이아니기에 부품은 사용자가 알아서 해야 된다는점이 있지만 저희 디바이스마트에서
손십게 구하실수 있으므로 걱정은 쿨하게 생략하도록 하겠습니다.
자, 먼저 Mecanum Platform의 메인 Control Panel을 살펴보도록 하겠습니다.
위와같이 생겼는데요. 여기서,
바로 이 단자가 Joystick과 연결해주는 부분인데요.
그렇다면 본격적으로 조이스틱 연결하기에 들어가겠습니다.
먼저 준비물이 몇가지 필요한데요.
첫번째가 조이스틱 입니다. 조이스틱은 사용하기 편한 것으로 골라서 사용하면 되는데요
저같은 경우는 조이스틱 200-M4 라는 제품을 사용하였습니다.
다음은 스위치 입니다. 스위치는 일반 푸시버튼 스위치인 PB86-AO 를 사용하였습니다.
스위치는 다양한 옵션을 위해 사용할 수 있습니다만(최대3개) 저는 Mecanum Platform의
동작mode변경을…
NT-Terminal v1.0을 이용하여 NT-ARSv1동작확인하기
안녕하세요
오늘은 저희의 터미널명령입력기NT-Terminal v1.0)를 사용하여 각도센서 NT-ARSv1의 데이터값을 받아보도록 하겠습니다.
먼저 RS232통신을 위해 NT-ARSv1를 컴퓨터와 아래와 같이 연결해줍니다.
(※자세한 연결 방법 및 정보는 메뉴얼을 참고하도록 합니다)
메뉴얼에 나와있는 핀맵을 보고 컴퓨터와 연결을 해주었다면
다음으로 필요한 NT-PortCheker를 다운받아 설치해주시기 바랍니다
프로그램 다운로드 후 설치를 완료하였으면 이제 동작을 확인해보도록하겠습니다.
먼저 NT-Terminal v1.0를 실행시키고 Search Comm Port 버튼으로 연결된 포트를 찾습니다.
저 같은 경우에는 NT-ARSv1이 포트6에 연결되어 있습니다.
NT-ARSv1은 초기 통신속도값이 115200bps로 설정되어있으므로 통신 속도값을 맞춰준 후 Connect버튼을 눌러 연결을 시켜줍니다.
그다음 동작에 필요한 명령어들을 make Command 버튼을 이용하여 아래와 같이 간단하게 단축키로 지정해줍니다.
단축키 지정 후 전부 적용을 눌러 단축키 세팅을 완료합니다.
단축키 세팅까지 완료하였으면 이제 본격적으로 동작을 시켜보겠습니다.
먼저 단일명령 입력란을 한번 클릭한후…
간단한 터미널명령입력기 NT-Terminal v1.0
안녕하세요. 오늘은 간단하게 터미널명령을 입력할수 있는 프로그램을 소개해드릴려고 합니다.
바로 NT-Terminal v1.0 인데요 자동포트감지 및 반복명령,단일명령을 모두 손쉽게 실행 할 수 있는 프로그램입니다.
먼저 아래 첨부파일을 클릭하여 다운받아주시기 바랍니다.
먼저 위 첨부파일을 다운받고 실행을시켜준 다음 아래 사진을 참고하여 설치를 해 주세요.
맨처음 파일 실행시 위와 같은 화면이 나옵니다 . 설치를 위해 <다음> 버튼을 클릭해주세요.
다음은 설치폴더를 지정해주는 화면이 나옵니다. 파일이 설치될 폴더를 선택후 설치시작 버튼을 눌러주세요.
프로그램설치는 대략 10초 안되는 사이에 금방 됩니다. 설치가 완료됬으면 프로그램실행을 위해 확인을 눌러주세요.
그럼 위 그림과 같이 NT-Terminal v1.0 파일이 설치된 폴더가 열립니다.
여기서 NTrexTerminal 이라써져있는 파일을 실행시켜 줍니다.
(추후 실행시에는 시작메뉴에 아이콘이 생성되있으므로 시작메뉴에서 실행을 시켜주면 됩니다.)
프로그램 인터페이스는 위사진과 같습니다.
맨위의 Search Comm…
고객의 니즈까지 탑재한 스마트한 로봇 세상, 기술력으로 완성하다 – ㈜엔티렉스 로봇연구소 양광웅 수석연구원
고객의 니즈까지 탑재한 스마트한 로봇 세상, 기술력으로 완성하다
㈜엔티렉스 로봇연구소 양광웅 수석연구원
1495년 레오나르도 다빈치가 최초의 인간형 로봇을 디자인한 이래 로봇의 역사는 상상을 뛰어넘을 만큼 진화했다.
사람 한 명 없이 로봇만으로 생산라인을 가동하는 기업이 있는가 하면, 외과의사를 대신해 로봇이 큰 수술을 도맡기도 한다.
심지어는 사람에 버금가는 지능과 감성을 탑재한 로봇까지 등장했다.
우리나라의 경우 선진국에 비해 다소 늦게 로봇산업의 바통을 이어받았지만 추격 속도가 놀라울 정도로 빠르다. (주)엔티렉스(대표이사 오상혁)는 그 대열에서도 단연 눈에 띄는 기업. 2003년 전자·전기부품 전문 온라인 쇼핑몰 ‘디바이스마트’로 창업해 탄탄한 기반을 구축한 이래 2006년 기업의 성장을 도모하고자 로봇연구소를 설립했다. 이전까지 유통 사업에 의존해왔다면 로봇연구소를 통해 로봇이라는 과학적 상상력의 날갯짓을 시작한 것이다. 이는 단순히 디바이스마트의…

초보자를 위한 NT-ARSv1 (Attitude Reference System) 보강
* Previously…
초보자를 위한 NT-ARSv1(Attitude Reference System)을 게시했었습니다.
이번에는 NT-ARSv1 (Attitude Reference System)을 좀 더
자유롭게 구동하기 위한 보강 Source를 만들어 보았습니다.
Radian 값과 Degree 값 모두 볼 수 있게 되어 있습니다.
* NT-ARSv1 Source
그럼 상세하게 NT-ARS의 <CAH>각도 값을 출력시키기 위한
비주얼 베이직 6.0 Source를 설명해 드리겠습니다.
Private Sub receive_Click()
receive.Enabled = True
Disconnect.Enabled = True
MSComm1.CommPort = 3
MSComm1.Settings = “115200,n,8,1″
MSComm1.PortOpen = True
MSComm1.Output = “<CAH>”
End Sub
Private Sub MSComm1_OnComm()
Dim n As Integer
Dim n0 As Integer
Dim n1 As Integer
Dim n2 As String
Dim n3 As Integer
Dim n4 As String
Const pi = 3.141592
Const deg = 180/pi
If MSComm1.PortOpen = False Then
Exit Sub
End If
Static…
초보자를 위한 NT-ARSv1 (Attitude Reference System)
* G.INS NT-ARSv1란?
G.INS의 G는 관성항법장치에서 중요한 요소인 Gravity를 의미하기도 하며, 사용자에게 좀 더 나은 결과값을 제시하기 위해 Genius한 제품을 만들기 위한 저희의 의지를 의미하기도 합니다.
또한 G.INS의 INS는 관성항법장치(Inertial Navigation System)을 의미하는데, 관성항법장치는 엔코더와 같이 고정점이 있어야만 상대각도를 측정할 수 있는 자신의 자세를 측정하기 위한 필수 장비입니다.
이번에 저희 ㈜엔티렉스는 G.INS 제품군의 첫 제품으로 NT-ARSv1을 출시하게 되었습니다.
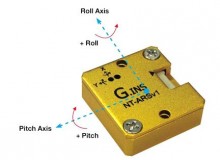
* NT-ARSv1(Attitude Reference System)란?
자이로센서와 가속도센서를 융합하여 각도를 추정할때, 흔히 공간상의 3개 자세중에서, z축 중심의 회전인 yaw를 제외하고, pitch와 roll을 측정하는 장비를 ARS라고 합니다.
ARS를 만들기 위해서는 3축 가속도 센서와 2축 자이로센서에 추가로 자이로의 온도특성을 보정하기 위한 온도센서,3개의 센서를 융합하고 필터를 설계하기 위한 MCU가 포함됩니다. 만약, Yaw까지 측정한다면, 흔히 AHRS라고 부릅니다.
ARS(Attitude Reference System)는…

탑승형 자율주행 알고리즘을 테스트할 플랫폼을 찾으신다면…
저희가 예전에 STELLA B2라는 제품을 출시했었습니다.[관련글바로가기] 이 때 STELLA B2는 자체로는 그냥 주행하는 기능을 가지고 있었습니다. 그래서 사용자가 자신의 PC든 혹은 자신이 만든 MCU든지 뭔가를 이용해서 저희 STELLA B2와 통신을 할 수 있도록 한 것입니다. 예를 들어 STELLA B2한테 앞으로 얼마만큼 가, 혹은 얼마의 속도가.. 이런 명령을 내리고, 또 STELLA B2한테서는 현재의 엔코더 값등을 받아오는 기능을 가지고 있었는데요. 이런 플랫폼을 이용해서 사용자는 자신이 테스트하고자하는 것을 수행할 수 있도록 하는 것입니다.
이번에 저희는 STELLA eCARv1을 곧 출시할 예정인데요. 쉽게 말하면, 자율주행 알고리즘 같은 것을 테스트하실 분들이 사용하면 좋으실 겁니다.
이미 디바이스마트를 통해 판매하고 있는 골프차[판매페이지 ]를 이용해서 자율주행에 맞게 제작을 한 것입니다. 먼저…

다목적 주행로봇 AstroBoyS 테스트
벌써 저희 회사가 있는 인천에도 벗꽃이 피었어요^^. 이런날은 야외로 개발중인 제품을 들고 테스트하면 기분이 아주 상쾌하죠^^ 요즘 저희는 AstroBoyS 라는 시리즈 명으로 다수의 로봇을 동시 개발 출시를 앞두고 있는데요. 오늘도 그 실험 동영상을 보여드릴까해요…^^
바로 이 아이들입니다. 요 아이들 중 앞에 있는 플리퍼가 달린 아이와 메카넘휠을 빼고는 한번 소개를 해 드렸었어요
이때는 인천의 송도까지 가서 테스트를 했었죠.^^[관련글]
이번에는 그때의 글과 합쳐서 일목 요연하게 성능을 보여드릴께요. 아직은 좀 더 보강해야합니다만, 그래도 언능언능 출시하고 싶네요^^
AstroBoyS시리즈를 줄여서 ABS라고 저희는 명명했습니다. 그래서 이 모델은 로봇의 자세를 안정화하는 플리퍼(flipper)가 달려있어서 ABS FT라는 이름입니다. 확장하면 AstroBoyS 시리즈 중 Flipper가 달린 Track 구동형 로봇이죠.^^
동영상을 보시면, 이 플리퍼를 이용해서…

험난한 지형에 딱 맞는 주행로봇 AstroBoyS 시리즈 테스트 中
인천 송도의 한 허허벌판(^^)입니다. 몇일전 저희 연구소 연구원 몇몇이 여길 방문했습니다.
뭔가 일이 벌어질것 같죠? ㅎ^^
여기서 저희는 최근 개발중인 AstroBoyS 시리즈 총 6종 중에서 무려 4종을 필드 테스트를 했습니다.
바로 위풍도 당당한 이 아이들이지요. 저중에 빨간 바퀴는 이전에 한 번 테스트를 했었구요[바로가기] 이번에는 좀 많이 가지고 나갔습니다.
이렇게 테스트를 강하게 수행했거든요^^
뭐.. 뭔말이 필요하겠습니까? 동영상하나로 끝내겠습니다. 언능언능 나머지 작업과 더 까칠한 테스트를 거쳐서 상용품으로 사용자들과 만나고 싶습니다.^^


