
RexBot3D OC-200 제품 개봉 및 첫 세팅
저희 3D 프린터의 첫 모델인 RexBot3D OC-200을 소개하고 재원을 공개한 후[바로가기], 이번에는 사용자들께서 본 제품을 구매하신 후 박스 상태에서 세팅까지를 알려드리는 문서입니다.
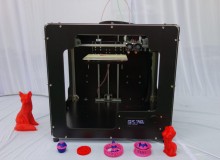
처음 박스를 열면 본체와 또 다른 박스가 있습니다. 좀 더 자세한 것은 아래에서 진행하구요. 구성품이야기를 해야겠네요. 바로 위 사진의 내용물이 모두 (당연히 본체와 함께) 있어야 합니다. 하나씩 점검하면
이 아이는 필라멘트 스풀(Spool)입니다. 저희는 싱글 노즐 가격에 두 노즐 모델을 제공해 드리고 있으니 필라멘트 스풀도 당연히 두 개가 들어갑니다.
이건 익스트루더(extruder) 모듈입니다. 역시 두 개가 있어야합니다. 저기 기어는 헤링본 기어라고 하는데, 색상은 임의로 선택되어 배송됩니다. 색상바꿔달라고 요청하시면 안됩니다.^^
그리고, 필라멘트 호스가 역시 두 개가 배송됩니다.
이건 저희가 끼워드리는 PLA 재료와 베드 안착용 테이프인데요. PLA재료는…

Motor Control UI Utility – Configuration 탭 버튼
디바이스마트 판매페이지 혹은 NTRexgo 제품 설명페이지에 기재되었다시피 고객 여러분들이 MoonWalker 시리즈 제품을 구매하시면 아마도 MoonWalker 사용자 매뉴얼과구매한 제품의 데이터시트 그리고 Motor Control UI Utility를 다운로드 받으실 겁니다. 다운로드를 받으시면 여러분들은 설명서와 Motor Control UI Utility를 이용해서 제어기의 기본 동작과 제어기가 가지고 있는 기능들을 습득하실 겁니다. 오늘은 여러분들이 Motor Control UI Utility를 이용하면서 제일 기본적이고 실수하기 쉬운 부분에 대해 알려드리겠습니다.
Read Configurations
제어기에 저장된 설정 값 읽기 (불러오기)
Write Configurations
제어기에 설정 값을 쓰기 (저장하기)
Load Factory Default
공장 출하 시 초기값 설정 불러오기
Reset Controller
제어기 소프트웨어적 리셋
Copy Config.Mot.1->Mot.2
Motor 1 설정 값을 Motor 2에 복사하기
Load from File
저장된 cfg 확장자 파일 불러오기
Save to File
설정된 값을 cfg 확장자 파일로 저장하기
Load from…
보급형 3D 프린터 RexBot3D OC-200
저희 보급형 3D 프린터의 상표는 RexBot3D입니다. 앞으로 출시될 다양한 라인업 중에 첫 번쨰 모델입니다. 다양한 장점을 가지고 있는 모델인데요.
먼저 저희 RexBor3D OC-200은 멀티노즐을 기본적으로 지원하고 있습니다.
단, 필라멘트는 기본만 구매하실떄는 하나만 제공됩니다.
위에 보시는 것 처럼 저희 제품은 노즐 뭉치를 아주 손쉽게 탈부착할 수 있도록 고안되어 있습니다. 사실 노즐이 간혹 막힐때, 필라멘트의 색상을 교환하고자 할때 등등 노즐을 교환해야하는 경우는 생각보다 자주 만나게 되는데요. 저희 RexBot3D는 그런 상황에서 보다 쉽게 노즐을 교환할 수 있도록 설계되어 있습니다. 노즐을 쉽게 교환하는 부분을 한번 동영상으로 보시죠.
RexBOT3D의 노즐 뭉치나 익스트루더 관련 모듈, 스텝모터, 구동 보드 등등 모듈등의 구성품을 모두 구매하실 수 있습니다. 이를 통해 사용자는 손쉽게 제품을…

Application Notes
1월달에 완성된 MoonWalker Series의 첫 번째 Application Notes에 이어 두번째 Application Notes를 드디어 완성하였습니다. 처음에는 Application Notes 1과 2를 구분해서 업로드할 계획이였으나 사용자의 편의를 위해 하나의 문서로 통합된 Application Notes를 만들기로 결정하였습니다.
MoonWalker Application Notes는 다음과 같은 순서로 구성되어 있습니다.
1장 소개
- MoonWalker Application Notes의 각 장에 대한 내용에 대해 간단히 설명합니다.
2장 제어기 및 주변 부품 선정 안내
- 제어기, 배터리, 모터, 엔코더 커넥터, 액세서리 등에 대해 설명하고 구매 시 고려해야 할 사항에 대한 정보를 제공합니다.
3장 모터연결과 전압전류 구동
- 제어기에 배터리, 모터, 통신 연결 방법, UI 유틸리티 다운로드 및 실행 방법 그리고 모터의 전압과 토크(전류) 구동 방법에 대해 설명합니다.
4장 엔코더 연결과 위치속도 구동
- 광학식 증분 엔코더 연결 및 노이즈 해결 방법…

간단한 바퀴 도면
이번 STL 도면은 바퀴를 만드는 것입니다. 그 중에서 플라스틱 계열의 PLA나 ABS로는 바퀴가 되지 않으니까 고무가 필요하죠. 그 고무는 찾다보니 디바이스 마트에서 K-Robot의 Wheel SET(60파이)라는 제품이 있습니다. [바로가기]
이 제품에서 고무만 사용하고 바퀴는 직접 만들려고 하시는 분들께 3D 도면을 제공해드릴려고 합니다.
설계는 스케치업으로 했구요. 모터 축은 도면화일을 드릴테니 사용하실 모터 축에 맞추시면 됩니다.
CURA에서 확인한 장면입니다.
CURA의 접착옵션은 BRIM으로 설정했구요. 밑 판을 때고 원 제품의 고무부분만 다시 입혀보면
이렇습니다. 괜찮네요^^ 이렇게 해서 자기만의 바퀴를 가져볼 수 있을 듯 합니다.^^

2013 로봇기술대상 산업통상자원부 장관상 수상^^
안녕하세요 엔티렉스 연구소입니다. 벌써 2013년도 끝나가려고 하네요. 2013년이 마무리되는 시점에 훈훈한 이야기하나 전해드릴려고 합니다. 바로 저희 (주)엔티렉스가 아주 뜻깊은 상을 받았기 때문입니다.
2013년 12월 4일에 서울 양재동 엘타워에서 2013 로봇인의 밤이 한국로봇산업협회와 파이낸셜뉴스의 공동주관, 산업통산자원부 주최로 개최되었는데요. 매년 열리는 로봇인의 밤에서는 한국 로봇기술대상을 선정하여 포상하는 행사를 같이하고 있습니다.
이 행사에서 저희 (주)엔티렉스가 산업통상자원부 장관상을 수상하였습니다.^^.
수상하는 회사들은 자사의 상품들을 이렇게 전시하는데요. 저희도 한쪽에 이렇게 전시했습니다. 이번에 전시된 로봇은 AstroBoyS[바로가기]라고 하는 주행로봇 제품군입니다.
다른 회사들도 이렇게 전시를 하고 있었습니다. 대통령상, 국무총리상 다음의 지위를 가진 장관상을 수상하게 격려하고 도와주신 많은 분들께 감사를 드립니다.
산업통상자원부 1차관님께서 저희 대표이사님께 상장을 수여하고 계십니다.
연회장에서 궁금함을 참지 못하고 이렇게 상장을 열어보았네요^^. 많이…

DC모터 드라이버 DC-20A 사용주의사항.
안녕하세요 NT-DC20A 를 사용시 많은 분들이 헷갈려 하시는 부분을 포스팅하려합니다.
위에서 보듯이 핀맵과 연결방법에대한 설명이 나와있습니다.
하지만 여기서 주의해야 할 점이 있습니다.
첫번째 바로 왼쪽 핀헤더로 나와있는 부분중 1~3번핀 즉 12V와 5V출력이 나오는 곳입니다.
가끔 몇몇분들이 이부분이 입력부분인줄 알고 12V와 5V를 인가해 주시는데요..! 이부분은 출력단자입니다…
전원을 인가하시면 안됩니다..
그리고 두번째 4번핀인 PWM에 관한 내용입니다.
PWM을 인가하실때 듀티비는 0~99.9%까지 인가해주셔야 합니다.
사진에서 보는바와 같이 PWM 듀티비에 따라 모터에 인가되는 전압또한 잘 나옵니다 . (12V전원 입력)
하지만 !!! PWM단자(4번)에 HIGH신호와 같은 듀티비100% 를 인가하면 이는 주파수성분을 포함하고 있지않기에 제대로된 전압이 나오지 않으며
아래 사진과 같이 7.8~8V주위의 전압이 나오게 됩니다.
사용하시는 분들은 이부분을 유심히 봐주시기 바랍니다!!
전압측정시 전압이 8V근처에서 일정하게 나온다! 라면 이는 제품의 불량이아니라 사용자의…

모바일 로봇 / 모바일 플랫폼 – STELLA B3
저희 연구소에서는 모바일 플랫폼이라는 제품군으로 과거에는 Stella B1과 B2를 출시하였고 이제는 Stella B3까지 출시하게 되었습니다.
Stella B3는 기구적 하드웨어적으로는 변화가 거의 없지만, 소프트웨어적으로 많은 업그레이드가 된 제품입니다. 기본적으로 Open-loop 속도 제어와 Closed-loop 전류/속도/위치 제어를 할 수 있으며, 제어기의 온도, 전압, 전류, 위치, 속도 등 제어기의 상황을 확인할 수 있습니다. DC / BLDC 모터 등을 H-bridge의 형태로 스위칭 소자들을 구성하고 각 스위칭 소자를 운용할 때 가장 많이 사용하는 Unipolar와 Bipolar 방식을 사용자가 선택할 수 있으며, 각 스위칭 소자에 인가되는 PWM 신호의 주파수를 18kHz부터 40kHz까지 사용자가 선택할 수 있습니다.
또한, 사용자의 안전과 모터와 제어기의 안전을 위한 한계치 설정도 할 수 있으며, 전류/속도/위치 제어기의 PID…
Application Notes 예고
MoonWalker라는 이름을 가진 모터 제어기가 출시된 지 한 달이 되었습니다. 생각보다 많은 분이 MoonWalker 시리즈에 관심을 가져다주셔서 놀랐습니다. 그래서 저희는 고객 여러분의 성원에 보답하고자, 그리고 MoonWalker 시리즈 제품의 원활하고 편리하게 사용하시길 바라고자 많은 예제와 동영상을 준비하였습니다.
MoonWalker 기초
MoonWalker 제어기를 사용하면서 많이 실수하는 부분
MoonWalker 매뉴얼을 보면서 궁금할 거 같은 부분 (세부적인 부분)
MoonWalker 통신 패킷 및 IO 포트 기능 사용의 예
MoonWalker 제어기와 CAN 통신 배선 연결 및 사용의 예
MoonWalker 제어기와 모바일 로봇 배선 연결 및 사용의 예
기타 등등..
말그대로 MoonWalker 제어기를 사용하면서 궁금하고 실수가 많은 기초적인 부분을 MoonWalker 예제 메뉴에 기재할 예정입니다. 유익하고 유용한 자료를 기재할 예정이오니 많은 관심을 가져다 주시기 바랍니다. 그리고 MoonWalker Application이 고객 여러분의 간지러운…

대용량 모터 연결하기
동영상 강의를 하면서 항상 MW DCM 시리즈를 대상으로 했는데요. 이번에는 대용량인 MW-MDC24D500D모델을 대상으로 할려고합니다. 기능과 운용방법은 동일하기 때문에 이전 강의를 참조하시면 됩니다. 이번에는 결선에 대해 이야기를 할려고 합니다.
MoonWalker MW-MDC24D500D 모델은 각 채널당 최대 연속 구동 전류가 40A인 채널이 2개가 있는 모델입니다. 용량이 높죠. 그래서 외형적 크기도 크답니다. 일단 이번 예제로 다룰 주행 로봇은
NT-TriWheel[바로가기]이라는 제품으로 그 안에 장착된 모터가 용량이 높습니다.
위에 보이는 사양대로 높죠. 어차피 10A만 넘어가도 MW-MDC24D200 시리즈로는 구동시키기 어렵습니다. 그래서 MW-MDC24D500 시리즈로 구동을 해보는 예제로 괜찮을 듯 합니다.
DCL 시리즈의 엔코더 연결 커넥터의 핀맵입니다.
그에 따른 배선도 입니다. 이전 동영상 강의까지 다 보셨다면 큰 무리없이 잘 연결하실 거라 생각합니다.
대용량이다 보니 MW-MDC24D500시리즈는 일반적인 작은 시스템에…


