[5호]위드로봇 무료강좌 기술자료 -1차
 1차 릴레이 무료강좌 기술자료
1차 릴레이 무료강좌 기술자료
MEMS 관성
센서 원리 및 활용법
부제 | 3축 가속도, 자이로 센서 응용
글 | 위드로봇(주) 김도윤대표
위드로봇 연구실 확장 이전 기념 릴레이 무료 강좌 1차 교육이 2010년 11월 27일 토요일에 성수동 위드로봇 본사에서 진행 되었습니다. MEMS 관성 센서 원리 및 활용법에 대한 주제로 진행된 이번 강좌의 강의 내용을 참석하지 못한 디바이스마트 매거진 구독자들을 위해 간단히 소개하고자 합니다. 2차, 3차, 4차로 진행된 강의 내용들도 순서대로 소개될 예정이니, 기대하셔도 좋을 듯 싶습니다.
디바이스마트 홈페이지에는 여러 종류의 센서들이 판매되고 있는데 가속도, 자이로 센서의 설명을 보면“MEMS 가속도 센서를 이용한 3축 가속도 센서 입니다”“MEMS 자이로 센서를 응용한 제품 입니다”라는 문구를 접할 수 있다.
MEMS 기술이 어떤 것인지, 어떤 장점을 가지고 있으며, 어떤 단점을 가지고 있는지 알고 있다면 이러한 센서를 보다 유의 적절하게 사용할 수 있을 것이다.
MEMS란?
MEMS는 Micro Electro Mechanical Systems의 머릿글자를 딴 약어이다. 단어를 그대로 풀어보면 소형 반도체 공법을 이용하여 기계 시스템을 만드는 것을 뜻한다.
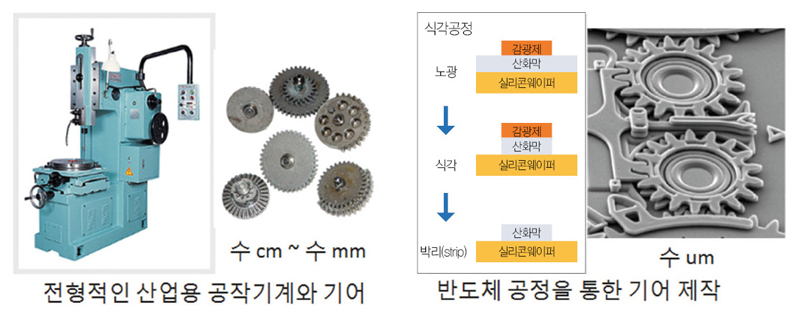
전형적인 산업용 공작 기계를 이용하면 아무리 작게 가공하여도 수 mm 이하의 부품을 만들어 내는 것은 힘들다. 하지만 반도체 웨이퍼 상에서 반도체를 제조하는 식각 공정을 이용하면 그 가공법에 한계는 있지만 수 um 수준의 부품을 만들어 낼 수 있다.
이러한 MEMS 공법은 반도체 제조 공정과 동일하기에 한 번에 여러 부품을 만들어 낼 수 있으며, 품질 또한 균일하게 만들며, 크기가 작아지기에 값싸고 여러 분야에 응용할 수 있다는 장점이 있다.
 |
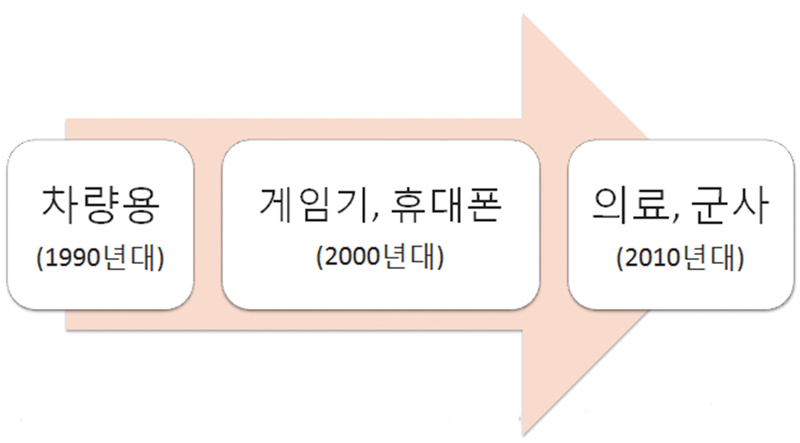 |
| 그림1. 산업용 공작기계 공정과 MEMS 공정 비교 | 그림2. MEMS 기술의 시대별 주요 시장 |
이와 같은 장점에 80년대 후반부터 많은 연구가 진행이 되어 왔고, 90년대에 들어와 차량용 에어백 장착이 의무화되면서 MEMS 가속도 센서 시장의 확대로 1차 중흥기를 맞이한다. 이후 2000년대에 들어와 게임기, 휴대폰에 이러한 가속도 센서가 인터페이스 도구로 활용되기 시작하면서 2차 중흥기 및 본격적인 양산 시대에 돌입한다.
특히 2010년 하반기에 들어서 가속도 센서에 비해 상대적으로 수 배에서 수 십배까지 비쌌던 MEMS 자이로 센서가 iPhone4를 위시하여 WiiMote Plus, 각종 테블릿 PC에 기본 장착되기 시작하며 MEMS 가속도, 자이로 센서는 수$ 대의 저렴한 가격대로 시장에 선보이고 있다. MEMS 시장을 예측하는 사람들은 2010년 이후에는 MEMS 기술이 의료(Lab on a chip), 군사 쪽에 활발히 적용되어 3세대를 열어갈 것이라 예상하고 있다.
DLP 프로젝트
MEMS 기술을 손쉽게 만날 수 있는 곳은 프로젝터이다. 90년대만해도 LCD 프로젝터가 주종을 이뤘으나, 2000년대 들어와 TI사에서 DLP(Digital Lighting Processing) 기술을 양산에 성공하면서 저렴한 DLP 프로젝터가 시장의 주종을 이루고 있다. 이 DLP 내부에 DMD(Digital Micro mirror Device) 부분이 바로 MEMS 기술을 이용한 부분이다. 반도체 공법으로 초소형 거울을 만들고 이 거울이 미세하게 움직일 수 있도록 하여 광원에서 나온 빛을 컬러 휠을 통과 시킨 후 거울에 반사시켜 하나의 이미지를 만드는 방식으로 값비싼 LCD를 대치하고 있다.
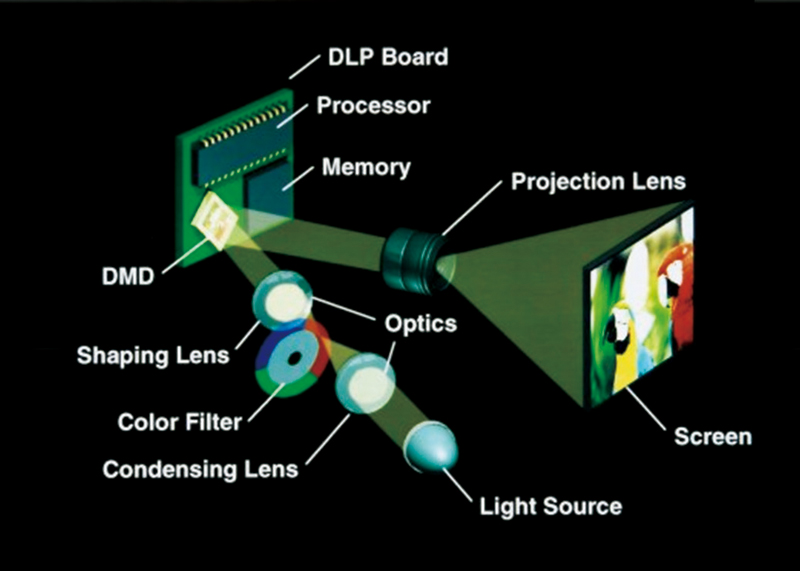 |
| 그림3. DLP 내부 구조 |
가속도 센서
MEMS 기술을 소개하는데 가속도 센서를 빼놓을 수 없다. MEMS 기술을 이용한 제품 중에서 MEMS 가속도 센서만큼 성공한 제품이 아직까지 없기 때문이다. MEMS 가속도 센서의 동작 원리는 여러 가지 방법으로 설명할 수 있겠지만 보다 손쉽게 설명하는 방법은 버스 내부에 손잡이와 기둥을 생각하면 손쉽게 이해할 수 있다.
자, 우리가 버스 안에 타고 있다고 생각해 보자. 버스가 정차하고 있는 동안 손잡이는 가운데 늘어져 있을 것이다. 이 때 운전사가 가속 패달을 밟으면 자동차를 속도을 올리기 시작하며 출발할 것이고, 가속되는 순간 손잡이는 뒤쪽으로 밀릴 것이다. 어느 정도 속도를 내어 정속으로 달리기 시작하면 다시 손잡이는 가운데로 돌아올 것이고, 브레이크를 밟아 감속하기 시작하면 손잡이는 앞으로 움직인다.
자, 이 때 버스 안쪽의 기둥의 거동은 어떠한가?
기둥은 버스와 단단히 한 몸체를 이루고 있어 이러한 관성력과 상관없이 단단히 제자리에 서있다.
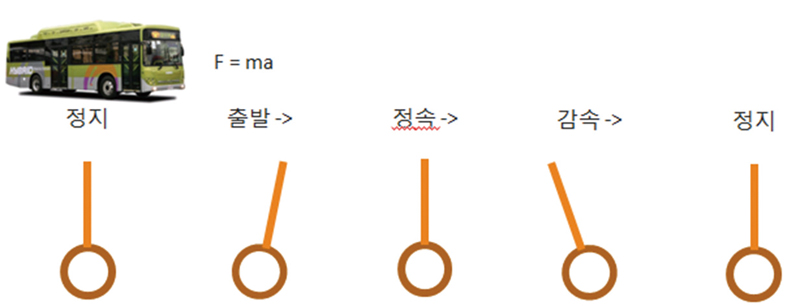 |
| 그림4. 버스 손잡이의 거동이 MEMS 센서 동작 원리와 같다. |
MEMS 기술로 만든 가속도 센서 내부도 버스의 기둥과 손잡이의 구조로 구성되어 있다. 아래 그림 5가 MEMS 가속도 센서 내부의 현미경 사진이다. 마치 빗처럼 생긴 부분을 확인할 수 있을 것이다. 이 빗처럼 생긴 부분이 바로, 센서 몸체에 단단히 붙어 있는 버스 기둥에 해당하는 부분과 버스 손잡이처럼 센서가 움직이면 자유롭게 같이 움직이는 추의 역할을 하는 부분이 중복되어 배치되어 있는 것이다. MEMS 센서는 이 양쪽에 전기를 가하여, 기둥과 손잡이의 간격이 줄어들었는지, 늘어났는지를 전기적 신호로 바꿔 외부로 출력하고 있는 것이다. 이 간극의 변화가 센서 움직임의 가속, 감속에 해당하는 것이기에 가속도 센서라 부른다.
 |
| 그림5. MEMS 가속도 센서 내부 구조 |
그런데 이러한 MEMS 기반의 가속도 센서에는 재미있는 성질을 관측할 수 있다. 위와 같은 구조로 X축, Y축, Z축 3축으로 각각 손잡이와 기둥을 배치했다고 생각해 보자. 센서가 가만히 서 있는 경우 X축과 Y축에는 변화가 없겠지만 Z축 방향으로는 우리는 못 느끼지만 지구상에 있는 모든 물체에게 항상 작용하는 힘, 바로 중력 가속도가 작용하여 손잡이 부분이 축 늘어지게 될 것 이다.
이 이야기는 3축 가속도 센서가 멈춰있을 경우 중력 가속도가 측정이 된다는 뜻이며, 센서를 회전시키면 중력 가속도가 측정되는 축이 변경되기에 센서가 어떤 포즈로 위치하고 있는지를 알 수 있다는 뜻이 된다.
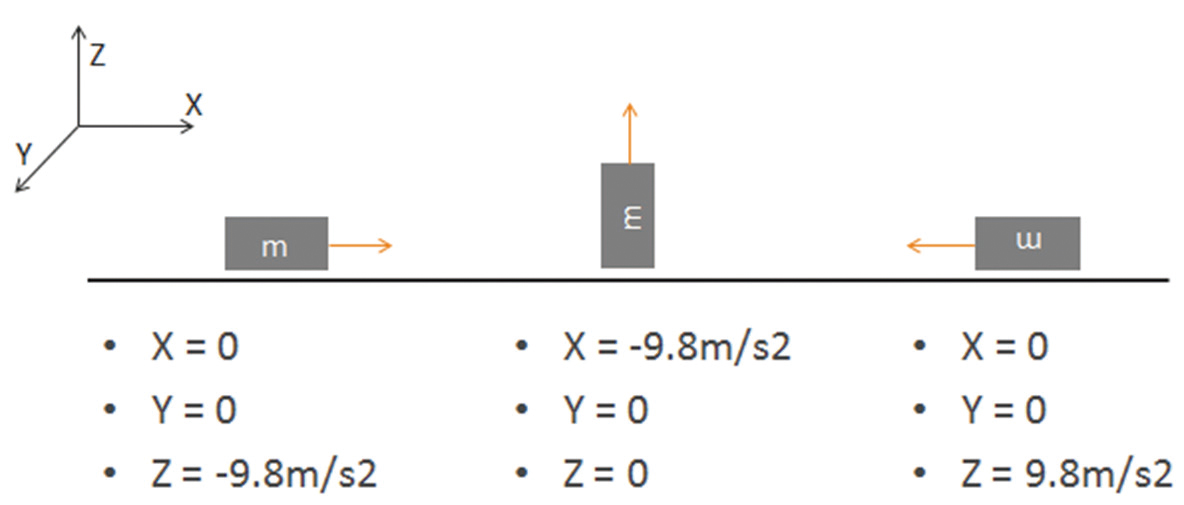 |
| 그림6. 가속도 센서 위치에 따른 중력 가속도 측정 축의 변화 |
이 기능은 MEMS 센서를 이용하는 사용자라면 누구든지 알고 있었으나 가장 멋지게 제품으로 포장해서 내놓은 제품이 바로 iPhone/iPod touch 이다.
장치를 회전하면 자동으로 알아서 화면을 가로 보기에서 세로 보기로 전환하는 기능은“팔리는 제품을 만들기 위해서는 기술을 어떻게 포장해야 하는가?”를 보여주는 단적인 예이기도 하다.
 |
| 그림7. 가속도 센서를 써본 사람이라면 누구든 알고 있던 기능을 스티븐 잡스는 화려한 인터페이스와 함께 멋지게 녹여냈다. |
MEMS 자이로 센서
MEMS 가속도 센서와 함께 널리 알려진 센서로는 MEMS 자이로 센서가 있다. 자이로 센서는 회전 각속도를 측정하는 센서로 일반 개발자들에게 많은 오해를 불러 일으키는 센서이기도 하다. 대부분의 개발자들은 회전한 각도를 알고 싶어하는데 이 때 자이로 센서를 사용하면 손쉽게 이 문제를 해결할 수 있을 것으로 생각한다. 하지만 아쉽게도 자이로 센서는 각속도 센서이지, 각도 센서가 아니다.
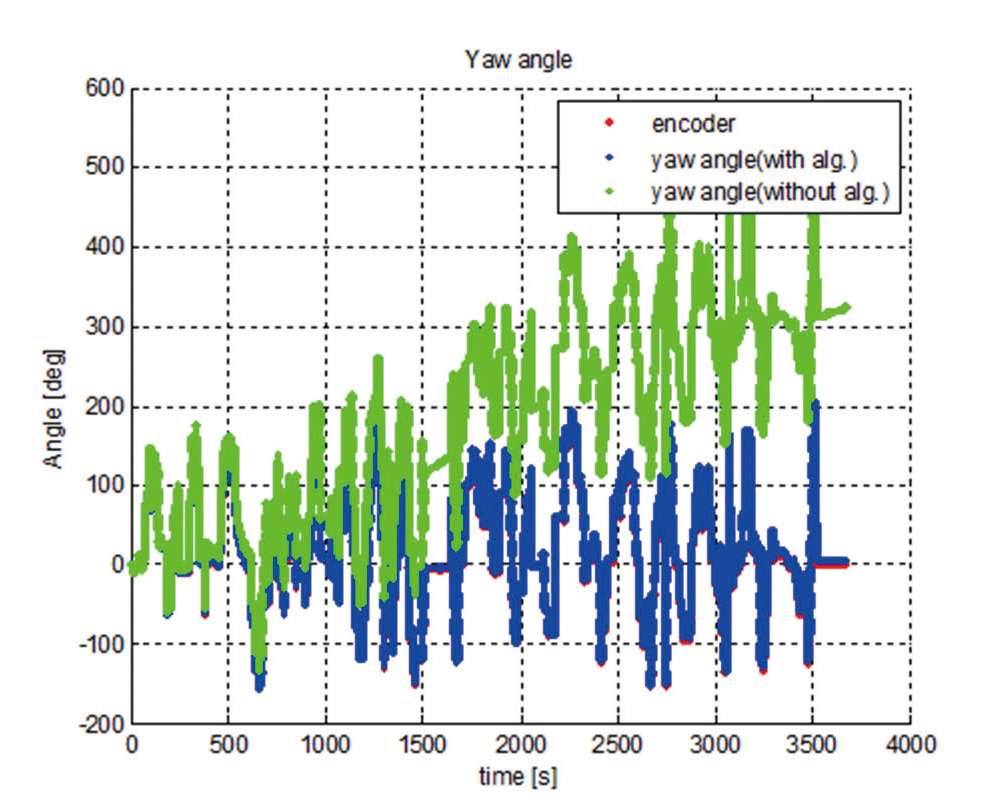
즉 회전하면 회전하는 속도를 측정하여 알려주는 센서이기에 회전한 각도를 알고 싶으면 자이로 센서의 출력값을 적분해야 한다. 디지털 제어기에서는 적분이 매 샘플링마다 덧셈으로 바뀌기에 이 값을 계속 더해야 하는데, 아쉽게도 센서는 항상 참값(true value)만 내주지는 않는다. 센서 출력값에는 true value와 노이즈(noise)가 섞여있기 마련인데, 이 값을 계속 적분하고 있으면 시간이 흐를수록 노이즈가 누적되는 현상이 나타나며, 이를 센서 드리프트(sensor drift)라고 한다. 이를 보상하는 기법은 매우 다양하게 연구되고 있으며, 결론부터 말하면 아직까지 다른 센서 도움 없이 완벽하게 센서 드리프트를 없애는 방법은 없다. 따라서 자이로 센서만을 이용하여 각도를 측정하려는 경우는 드리프트를 가능한 작게 만드는 알고리즘을 개발하는데 만족해야 하며, 완전히 제거하려면 다른 센서의 도움이 필요하다.
 |
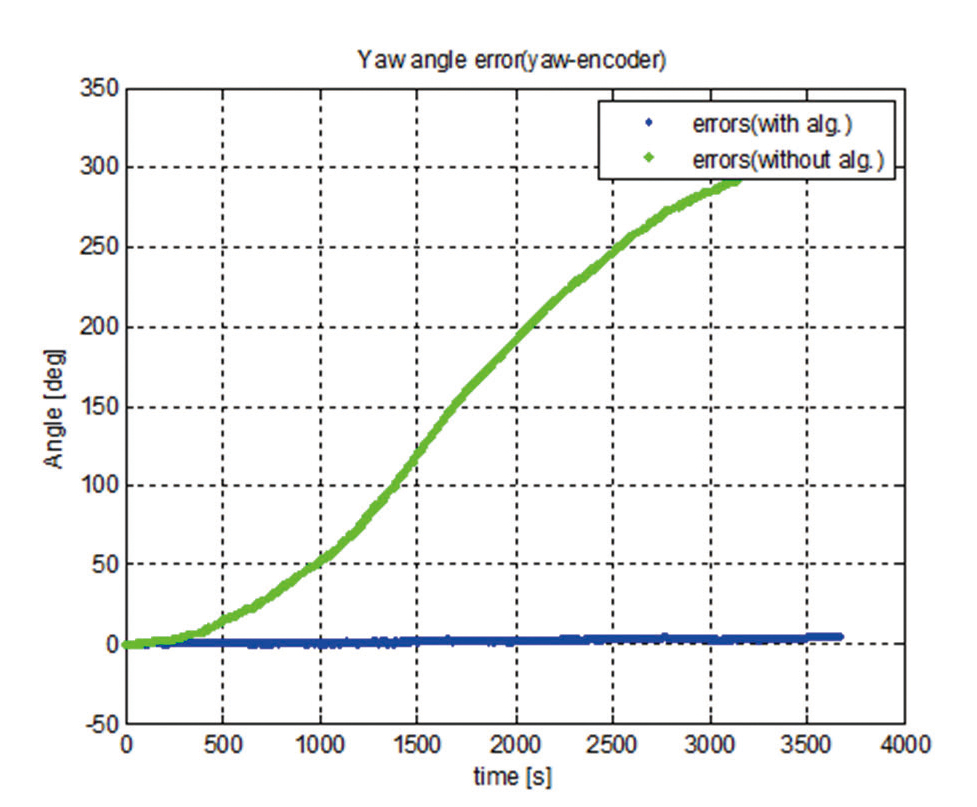 |
| 그림8. 저가형 자이로 센서의 출력(녹색)과 알고리즘은 적용하여 각도를 추출한 경우(파란색) | |
위드 로봇에서는 위 두 가지 방법을 모두 시도하여 꽤나 의미 있는 결과를 얻어냈다.
우선 단일 자이로 센서의 출력에서부터 각도를 의미 있게 추출하기 위해 폐루프 제어 시스템을 구성한 뒤 강화학습 알고리즘을 적용하여 자이로 센서의 노이즈를 제거하는 방법을 개발하였다(특허 3건, 논문 2편). 실험 결과 저가형 자이로 센서를 이용하여 알고리즘을 적용한 결과 한 시간당 5도 이내의 누적 오차를 보이는 고가형 자이로에서도 얻기 힘든 결과를 획득할 수 있었다. 특히 정지되어 있지 않고 움직일 경우는 더욱 오차가 줄어들기에 활용시에는 더욱 개선된 성능을 느끼게 될 것이다.
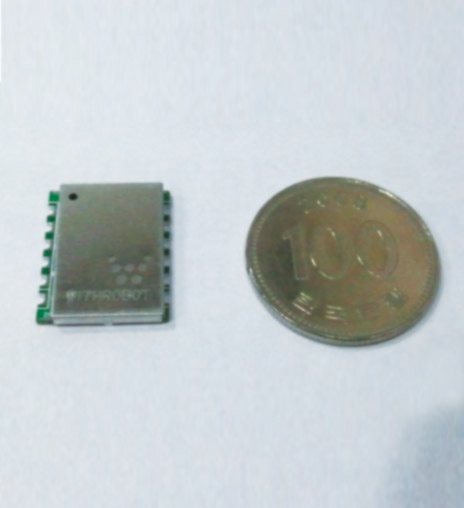
위드로봇에서는 2011년 상반기 중으로 이와 같은 알고리즘을 적용한 자이로 센서를 100원짜리 동전보다 작은 형태로 패키징하여 출시할 계획을 가지고 있다.
센서 융합
자이로 센서는 가속도 센서와 융합할 경우 더욱 큰 효과를 볼 수 있다. 3축 가속도 센서와 2축 자이로 센서를 융합하면 ARS(Attitude Reference System)을 구성할 수 있다. 전형적인 구조는 각 센서의 출력값을 적절한 상태 변수(states)를 가지는 칼만 필터(Kalman filter)를 구성하여 각도를 뽑아내는 것인데, 3축 가속도와 2축 자이로의 조합일 경우는 tilt와 pitch값을 드리프트 없이 찾아낼 수 있다.
위드로봇에서는 2010년 하반기에 이러한 ARS 장치를 초소형으로 제작하는데 착수하여 개발을 완료하였다. 2011년 1월 중으로 디바이스마트를 통해 판매 예정에 있다.
 |
 |
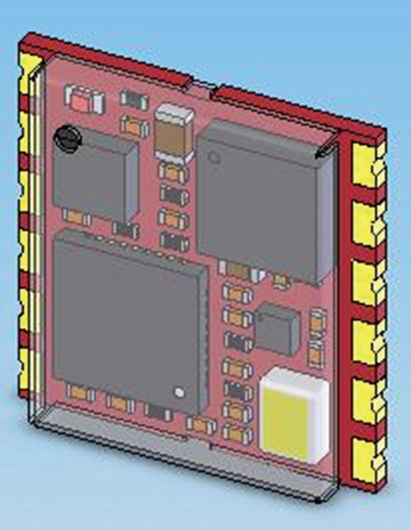
| 그림9. 개발 완료된 초소형 ARS(모델명 : myARS-USB) | |
보기에는 작아 보이지만, 내부에 USB, i2c, UART 인터페이스를 가지고 있어 별도의 장치 없이 USB 케이블을 연결하면 바로 PC와 연결이 가능하다. 이 제품의 개발 과정은 위드로봇 개발자 블로그인 withrobot.tistory.com에 자세히 설명되어 있다.
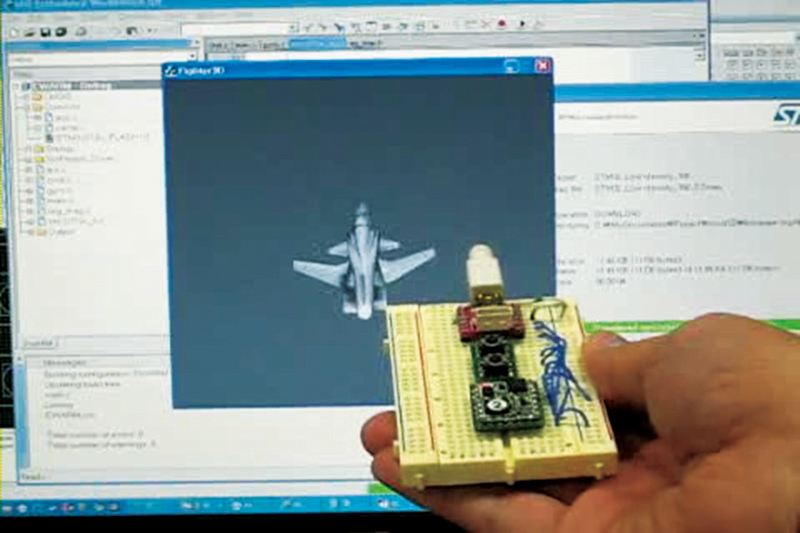 |
| 그림 10. myARS-USB 테스트 모습 |
이 외에도 저잡음 MEMS 가속도 센서를 손쉽게 USB, UART로 연결 가능한 제품군과 3축 가속도, 3축 자이로 센서로 구성된 myIMU6-USB, 9축 IMU(3축 가속도, 자이로, 지자기 센서)도 개발 중이거나 개발이 완료되어 2011년 상반기에 출시 일정을 조율하고 있다. 이러한 제품들이 출시되면 디바이스마트 고객들은 보다 손쉽게 MEMS 기반 센서들을 다룰 수 있게 될 것이라 예상하고 있다.
같이 생각해 보고 싶은 결론
가속도 센서와 자이로 센서의 융합을 통해 각 센서의 단점을 없애고 보다 나은 결과를 도출해 내듯이 엔지니어들도 협동(Co-work)을 통해 시너지를 낼 수 있는 팀 플레이(Team play)에 보다 관심을 쏟을 때라 생각한다.
10년간 꽤 많은 국내외 학회에 참석하거나 연구소를 방문하여 국내, 국외 엔지니어들과 이야기해 보았지만 국내 엔지니어 개개인의 연구자질은 최상급이다. 문제는 이렇게 훌륭한 엔지니어들이 2명, 3명을 모아두면 1+1= 2 또는 3이 되어야 할 텐데 1.5, 1.2가 되거나 심지어는 0.8, 0.7이 된다는 점이 문제이다. 이는‘혼자 일하는 방법’만 배웠고,‘같이 일하는 방법’은 어느 누구도 가르쳐 주지 않았기 때문인 것 같다.
MEMS 센서 활용에서 배울 수 있듯이‘같이 일하는, 같이 행복해지는’방법을 다같이 고민해 봤으면 한다. 위드로봇(WITHROBOT)의 ‘WITH’접두사도 이러한 고민을 담은 사명이기도 하다.
이미지출처
그림3 : 출처-Texas Instruments 홈페이지
그림5 : 출처-Analog Device 홈페이지
그림7 : 출처-Apple 홈페이지


